范数、稀疏与过拟合合集(1)范数的定义与常用范数介绍
范数、稀疏与过拟合合集(2)有监督模型下的过拟合与正则化加入后缓解过拟合的原理
范数、稀疏与过拟合合集(3)范数与稀疏化的原理、L0L1L2范数的比较以及数学分析
范数、稀疏与过拟合合集(4)L2范数对condition number较差情况的缓解
范数、稀疏与过拟合合集(5)Dropout原理,操作实现,为什么可以缓解过拟合,使用中的技巧
优化有两大难题
一是:局部最小值
我们的目标是找到全局最小值,如果局部最小值太多,那我们的优化算法就很容易陷入局部最小而不能自拔,这很明显不是观众愿意看到的剧情。
二是:ill-condition病态问题
解释一下ill-condition。ill-condition对应的是well-condition。
那他们分别代表什么?假设我们有个方程组 A X = b AX=b AX=b,我们需要求解 X X X。如果 A A A或者 b b b稍微的改变,会使得 X X X的解发生很大的改变,那么这个方程组系统就是ill-condition的,反之就是well-condition的。我们具体举个例子吧:
equations solution [ 1 2 2 3.999 ] [ x y ] = [ 4 7.999 ] [ x y ] = [ 2 1 ] [ 1 2 2 3.999 ] [ x y ] = [ 4.001 7.998 ] [ x y ] = [ − 3.999 4.000 ] [ 1.001 2.001 2.001 3.998 ] [ x y ] = [ 4 7.999 ] [ x y ] = [ 3.994 0.001388 ] \begin{aligned} &\text { equations } \quad \quad &\text { solution }\\ \left[\begin{array}{cc}1 & 2 \\2 & 3.999\end{array}\right]\left[\begin{array}{l}x \\y\end{array}\right]&=\left[\begin{array}{c}4 \\7.999\end{array}\right] \quad &\left[\begin{array}{l}x \\y\end{array}\right]&=\left[\begin{array}{l}2 \\1\end{array}\right]\\ \left[\begin{array}{cc}1 & 2 \\2 & 3.999\end{array}\right]\left[\begin{array}{l}x \\y\end{array}\right]&=\left[\begin{array}{l} 4.001 \\7.998\end{array}\right] \quad &\left[\begin{array}{l}x \\y\end{array}\right]&=\left[\begin{array}{c}-3.999 \\4.000\end{array}\right]\\ \left[\begin{array}{cc}1.001 & 2.001 \\2.001 & 3.998\end{array}\right]\left[\begin{array}{l}x \\y \end{array}\right]&=\left[\begin{array}{c}4 \\7.999\end{array}\right] \quad &\left[\begin{array}{l}x \\y \end{array}\right]&=\left[\begin{array}{c}3.994 \\0.001388\end{array}\right] \end{aligned} [1223.999][xy][1223.999][xy][1.0012.0012.0013.998][xy] equations =[47.999]=[4.0017.998]=[47.999] solution [xy][xy][xy]=[21]=[−3.9994.000]=[3.9940.001388]
equations solution [ 1 2 2 3 ] [ x y ] = [ 4 7 ] [ x y ] = [ 2 1 ] [ 1 2 2 3 ] [ x y ] = [ 4.001 7.001 ] [ x y ] = [ 1.999 1.001 ] [ 1.001 2.001 2.001 3.001 ] [ x y ] = [ 4 7 ] [ x y ] = [ 2.003 0.997 ] \begin{aligned} &\text { equations } \quad &\text { solution }\\ \left[\begin{array}{ll}1 & 2 \\2 & 3\end{array}\right]\left[\begin{array}{l}x \\y\end{array}\right]&=\left[\begin{array}{l}4 \\7\end{array}\right] \quad &\left[\begin{array}{l}x \\y\end{array}\right]&=\left[\begin{array}{l}2 \\1\end{array}\right]\\ \left[\begin{array}{ll}1 & 2 \\2 & 3\end{array}\right]\left[\begin{array}{l}x \\y\end{array}\right]&=\left[\begin{array}{l}4.001 \\7.001\end{array}\right] \quad &\left[\begin{array}{l}x \\y\end{array}\right]&=\left[\begin{array}{l}1.999 \\1.001\end{array}\right]\\ \left[\begin{array}{cc}1.001 & 2.001 \\2.001 & 3.001\end{array}\right]\left[\begin{array}{l}x \\y\end{array}\right]&=\left[\begin{array}{l}4 \\7\end{array}\right] \quad &\left[\begin{array}{l}x \\y\end{array}\right]&=\left[\begin{array}{l}2.003 \\0.997\end{array}\right] \end{aligned} [1223][xy][1223][xy][1.0012.0012.0013.001][xy] equations =[47]=[4.0017.001]=[47] solution [xy][xy][xy]=[21]=[1.9991.001]=[2.0030.997]
咱们先看上边的那个。第一行假设是我们的 A X = b AX=b AX=b,第二行我们稍微改变下 b b b,得到的 x x x和 y y y没改变前的差别很大。第三行我们稍微改变下系数矩阵 A A A,可以看到结果的变化也很大。换句话来说,这个系统的解对系数矩阵 A A A或者 b b b太敏感了。又因为一般我们的系数矩阵 A A A和 b b b是从实验数据里面估计得到的,所以它是存在误差的,如果我们的系统对这个误差是可以容忍的就还好,但系统对这个误差太敏感了,以至于我们的解的误差更大,那这个解就太不靠谱了。所以这个方程组系统就是ill-conditioned病态的,不正常的,不稳定的,有问题的。
下边那个就叫well-condition的系统了。
对于一个ill-condition的系统,我的输入稍微改变下,输出就发生很大的改变,这不好啊,这表明我们的系统不能实用啊。你想想看,例如对于一个回归问题 y = f ( x ) y=f(x) y=f(x),我们是用训练样本 x x x去训练模型 f f f,使得 y y y尽量输出我们期待的值,例如0。那假如我们遇到一个样本 x ’ x’ x’,这个样本和训练样本 x x x差别很小,面对他,系统本应该输出和上面的y差不多的值的,例如0.00001,最后却给我输出了一个0.9999,这很明显不对呀。就好像,你很熟悉的一个人脸上长了个青春痘,你就不认识他了,那你大脑就太差劲了,哈哈。所以如果一个系统是ill-conditioned病态的,我们就会对它的结果产生怀疑。那到底要相信它多少呢?我们得找个标准来衡量吧,因为有些系统的病没那么重,它的结果还是可以相信的,不能一刀切吧。终于回来了,上一篇blog提到的condition number就是拿来衡量ill-condition系统的可信度的。condition number衡量的是输入发生微小变化的时候,输出会发生多大的变化。也就是系统对微小变化的敏感度。condition number值小的就是well-conditioned的,大的就是ill-conditioned的。
condition number定义
如果方阵 A A A是非奇异的,那么 A A A的condition number定义为:
κ ( A ) = ∥ A ∥ ∥ A − 1 ∥ \kappa(A)=\|A\|\left\|A^{-1}\right\| κ(A)=∥A∥∥∥A−1∥∥
也就是矩阵 A A A的norm乘以它的逆的norm。所以具体的值是多少,就要看你选择的norm是什么了。如果方阵 A A A是奇异的,那么 A A A的condition number就是正无穷大了。实际上,每一个可逆方阵都存在一个condition number。但如果要计算它,我们需要先知道这个方阵的norm(范数)和Machine Epsilon(机器的精度)。
为什么要范数?范数就相当于衡量一个矩阵的大小,我们知道矩阵是没有大小的,上面例子中要衡量一个矩阵 A A A或者向量 b b b变化的时候,我们的解 X X X变化的大小。所以肯定得要有一个东西来度量矩阵和向量的大小。就是范数,表示矩阵大小或者向量长度。
经过比较简单的证明,对于 A X = b AX=b AX=b,我们可以得到以下的结论:
∥ Δ x ∥ ∥ x ∥ ≤ ∥ A ∥ ⋅ ∥ A − 1 ∥ ⋅ ∥ Δ b ∥ ∥ b ∥ ∥ Δ x ∥ ∥ x ∥ ≤ κ ( A ) ⋅ ∥ Δ b ∥ ∥ b ∥ ∥ Δ x ∥ ∥ x + Δ x ∥ ≤ κ ( A ) ∥ Δ A ∥ ∥ A ∥ \begin{aligned} \frac{\|\Delta x\|}{\|x\|} \leq\|A\| \cdot\left\|A^{-1}\right\| \cdot \frac{\|\Delta b\|}{\|b\|} \\ \frac{\|\Delta x\|}{\|x\| } \leq \kappa(A) \cdot \frac{\|\Delta b\|}{\|b\|}\\ \frac{\|\Delta x\|}{\|x+\Delta x\|} \leq \kappa(A) \frac{\| \Delta A\|}{\|A\|} \end{aligned} ∥x∥∥Δx∥≤∥A∥⋅∥∥A−1∥∥⋅∥b∥∥Δb∥∥x∥∥Δx∥≤κ(A)⋅∥b∥∥Δb∥∥x+Δx∥∥Δx∥≤κ(A)∥A∥∥ΔA∥
也就是我们的解 x x x的相对变化和 A A A或者 b b b的相对变化是有像上面那样的关系的,其中 κ ( A ) \kappa(A) κ(A)的值就相当于倍率,相当于 x x x变化的界。
对condition number来个一句话总结:condition number是一个矩阵(或者它所描述的线性系统)的稳定性或者敏感度的度量,如果一个矩阵的condition number在1附近,那么它就是well-conditioned的,如果远大于1,那么它就是ill-conditioned的,如果一个系统是ill-conditioned的,它的输出结果就不要太相信了。
L 2 L_2 L2范数对于condition number较差情况的缓解
从优化或者数值计算的角度来说, L 2 L_2 L2范数有助于处理condition number不好的情况下矩阵求逆很困难的问题。因为目标函数如果是二次的,对于线性回归来说,那实际上是有解析解的,求导并令导数等于零即可得到最优解为:
w ^ = ( X T X ) − 1 X T y \hat{\mathbf{w}}=\left(X^{T} X\right)^{-1} X^{T} \mathbf{y} w^=(XTX)−1XTy
然而,如果当我们的样本 X X X的数目比每个样本的维度还要小的时候,矩阵 X T X X^TX XTX将会不是满秩的,也就是 X T X X^TX XTX会变得不可逆,所以 w ∗ w_* w∗就没办法直接计算出来了。或者更确切地说,将会有无穷多个解(因为我们方程组的个数小于未知数的个数)。也就是说,我们的数据不足以确定一个解,如果我们从所有可行解里随机选一个的话,很可能并不是真正好的解,总而言之,我们过拟合了。
但如果加上 L 2 L_2 L2规则项,就变成了下面这种情况,就可以直接求逆了:
w ∗ = ( X T X + λ I ) − 1 X T y w^{*}=\left(X^{T} X+\lambda I\right)^{-1} X^{T} y w∗=(XTX+λI)−1XTy
这里面,专业点的描述是:要得到这个解,我们通常并不直接求矩阵的逆,而是通过解线性方程组的方式(例如高斯消元法)来计算。考虑没有规则项的时候,也就是 λ = 0 \lambda=0 λ=0的情况,如果矩阵XTX的condition number很大的话,解线性方程组就会在数值上相当不稳定,而这个规则项的引入则可以改善condition number。
另外,如果使用迭代优化的算法,condition number太大仍然会导致问题:它会拖慢迭代的收敛速度,而正则项从优化的角度来看,实际上是将目标函数变成λ-strongly convex(λ强凸)的了。这里又出现个λ强凸,啥叫λ强凸呢?
当 f f f满足:
f ( y ) ≥ f ( x ) + < ∇ f ( x ) , y − x > + λ 2 ∥ y − x ∥ 2 f(\mathrm{y}) \geq \mathrm{f}(\mathrm{x})+<\nabla f(\mathrm{x}), \mathrm{y}-\mathrm{x}>+\frac{\lambda}{2}\|\mathrm{y}-\mathrm{x}\|^{2} f(y)≥f(x)+<∇f(x),y−x>+2λ∥y−x∥2
时,我们称f为λ-strongl yconvex函数,其中参数 λ > 0 \lambda>0 λ>0。当 λ = 0 \lambda=0 λ=0时退回到普通convex函数的定义。
在直观的说明强凸之前,我们先看看普通的凸是怎样的。假设我们让f在x的地方做一阶泰勒近似(一阶泰勒展开忘了吗? f ( x ) = f ( a ) + f ’ ( a ) ( x − a ) + o ( ∣ ∣ x − a ∣ ∣ ) ) f(x)=f(a)+f’(a)(x-a)+o(||x-a||)) f(x)=f(a)+f’(a)(x−a)+o(∣∣x−a∣∣)):
f ( y ) ≥ f ( x ) + < ∇ f ( x ) , y − x > + o ( ∥ y − x ∥ ) f(\mathrm{y}) \geq \mathrm{f}(\mathrm{x})+<\nabla f(\mathrm{x}), \mathrm{y}-\mathrm{x}>+o(\|\mathrm{y}-\mathrm{x}\| ) f(y)≥f(x)+<∇f(x),y−x>+o(∥y−x∥)
直观来讲,convex 性质是指函数曲线位于该点处的切线,也就是线性近似之上,而 strongly convex 则进一步要求位于该处的一个二次函数上方,也就是说要求函数不要太“平坦”而是可以保证有一定的“向上弯曲”的趋势。专业点说,就是convex 可以保证函数在任意一点都处于它的一阶泰勒函数之上,而strongly convex可以保证函数在任意一点都存在一个非常漂亮的二次下界quadratic lower bound。当然这是一个很强的假设,但是同时也是非常重要的假设。可能还不好理解,那我们画个图来形象的理解下
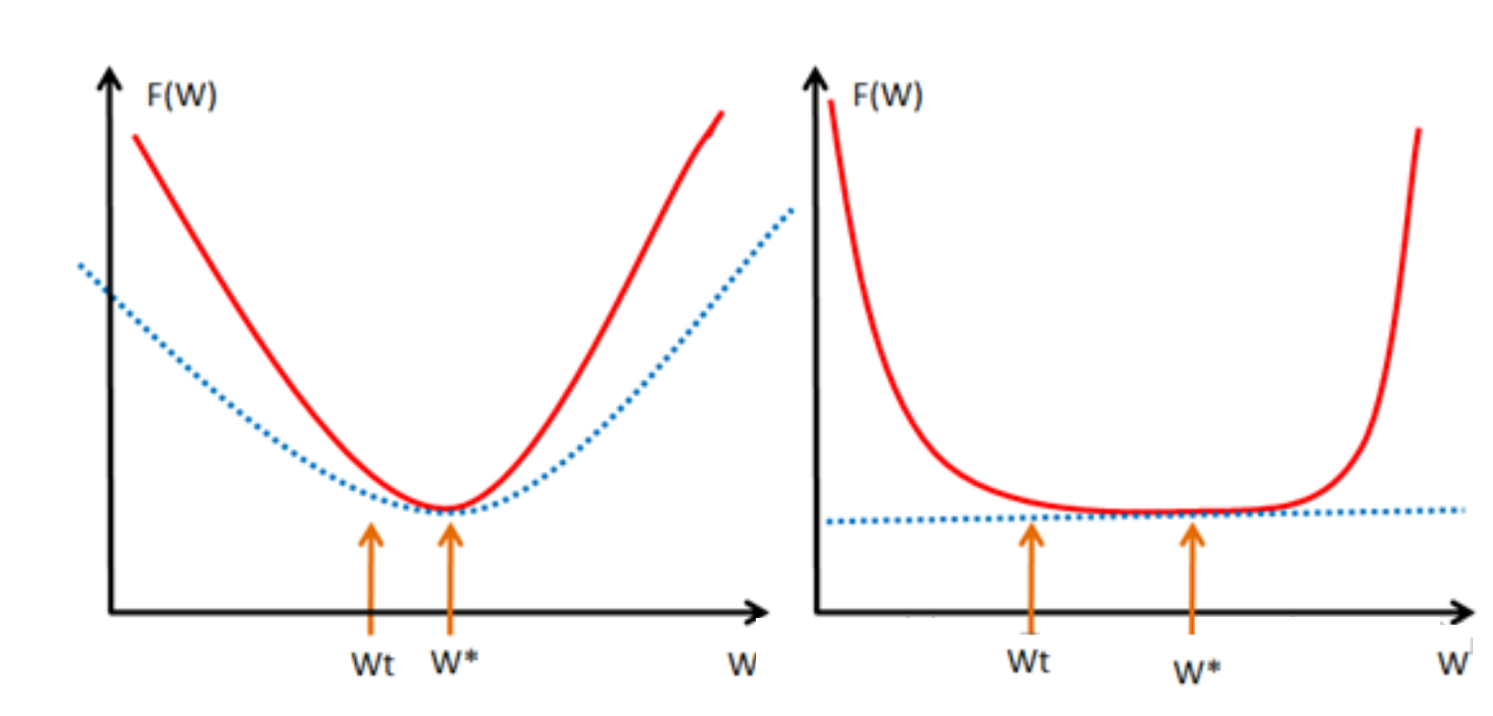
大家一看到上面这个图就全明白了吧。不用我啰嗦了吧。还是啰嗦一下吧。我们取我们的最优解 w ∗ w_* w∗的地方。如果我们的函数 f ( w ) f(w) f(w),见左图,也就是红色那个函数,都会位于蓝色虚线的那根二次函数之上,这样就算 w t w_t wt和 w ∗ w_* w∗离的比较近的时候, f ( w t ) f(w_t) f(wt)和 f ( w ∗ ) f(w_*) f(w∗)的值差别还是挺大的,也就是会保证在我们的最优解 w ∗ w_* w∗附近的时候,还存在较大的梯度值,这样我们才可以在比较少的迭代次数内达到 w ∗ w_* w∗ 。但对于右图,红色的函数 f ( w ) f(w) f(w) 只约束在一个线性的蓝色虚线之上,假设是如右图的很不幸的情况(非常平坦),那在 w t w_t wt还离我们的最优点 w ∗ w_* w∗很远的时候,我们的近似梯度 f ( w t ) − f ( w ∗ ) w t − w ∗ \frac{f(w_t)-f(w_*)}{w_t-w_*} wt−w∗f(wt)−f(w∗)就已经非常小了,在 w t w_t wt处的近似梯度 ∂ f ∂ u \frac{\partial f }{\partial u} ∂u∂f就更小了,这样通过梯度下降 w t + 1 = w t − α ∗ ∂ f ∂ u w_t+1=w_t-\alpha*\frac{\partial f }{\partial u} wt+1=wt−α∗∂u∂f,我们得到的结果就是 w w w的变化非常缓慢,像蜗牛一样,非常缓慢的向我们的最优点 w ∗ w_* w∗爬动,那在有限的迭代时间内,它离我们的最优点还是很远。
所以仅仅靠convex 性质并不能保证在梯度下降和有限的迭代次数的情况下得到的点 w w w会是一个比较好的全局最小点 w ∗ w_* w∗的近似点(插个话,有地方说,实际上让迭代在接近最优的地方停止,也是一种规则化或者提高泛化性能的方法)。正如上面分析的那样,如果 f ( w ) f(w) f(w)在全局最小点 w ∗ w_* w∗周围是非常平坦的情况的话,我们有可能会找到一个很远的点。但如果我们有“强凸”的话,就能对情况做一些控制,我们就可以得到一个更好的近似解。至于有多好嘛,这里面有一个bound,这个 bound 的好坏也要取决于strongly convex性质中的常数 α \alpha α的大小。看到这里,不知道大家学聪明了没有。如果要获得strongly convex怎么做?最简单的就是往里面加入一项 ( α / 2 ) ∗ ∣ ∣ w ∣ ∣ 2 (\alpha/2)*||w||2 (α/2)∗∣∣w∣∣2。
呃,讲个strongly convex花了那么多的篇幅。实际上,在梯度下降中,目标函数收敛速率的上界实际上是和矩阵 X T X X^TX XTX的 condition number有关, X T X X^TX XTX的 condition number越小,上界就越小,也就是收敛速度会越快。
L 2 L_2 L2范数不但可以防止过拟合,还可以让我们的优化求解变得稳定和快速。
LAST、参考文献
各种范数的解释_u011484045的专栏-CSDN博客
如何通俗易懂地解释「范数」? - 知乎
范数_weixin_34233618的博客-CSDN博客
范数、L1范数和L2范数的基本概念_lioncv的专栏-CSDN博客_l1范数的定义
过拟合以及正则化(L0,L1,L2范数)_yeal-CSDN博客
谱范数的理解与论述_MathThinker的博客-CSDN博客
向量范数与矩阵范数 - 知乎
L1范数和L2范数的区别 - 程序员大本营
L1范数与L2范数的区别 - 知乎
范数、L1范数和L2范数的基本概念_lioncv的专栏-CSDN博客_l1范数的定义
机器学习中的范数规则化之(一)L0、L1与L2范数_bitcarmanlee的博客-CSDN博客
L1范数与L2范数的区别_不二的博客-CSDN博客_l2范数