写在前面的婆婆妈妈的话
本人大三,参加过数次电赛,来CSDN好久, 每次都是在绝望中从这里找到了希望,每次都仿佛一个即将被怪兽打翻的小船突然被危险流浪者救起来。是众多前辈的智慧,让我有信心继续做下去,今天上午学校自己举办的电子设计竞赛公布了结果,获了一等奖,万分开心时,却也不忘CSDN的恩泽,就有了把自己的东西分享出去的念头,我希望我写的这一片博文,可以给需要的人带来哪怕微小的一点作用。第一次写,还请包涵。
工程简介
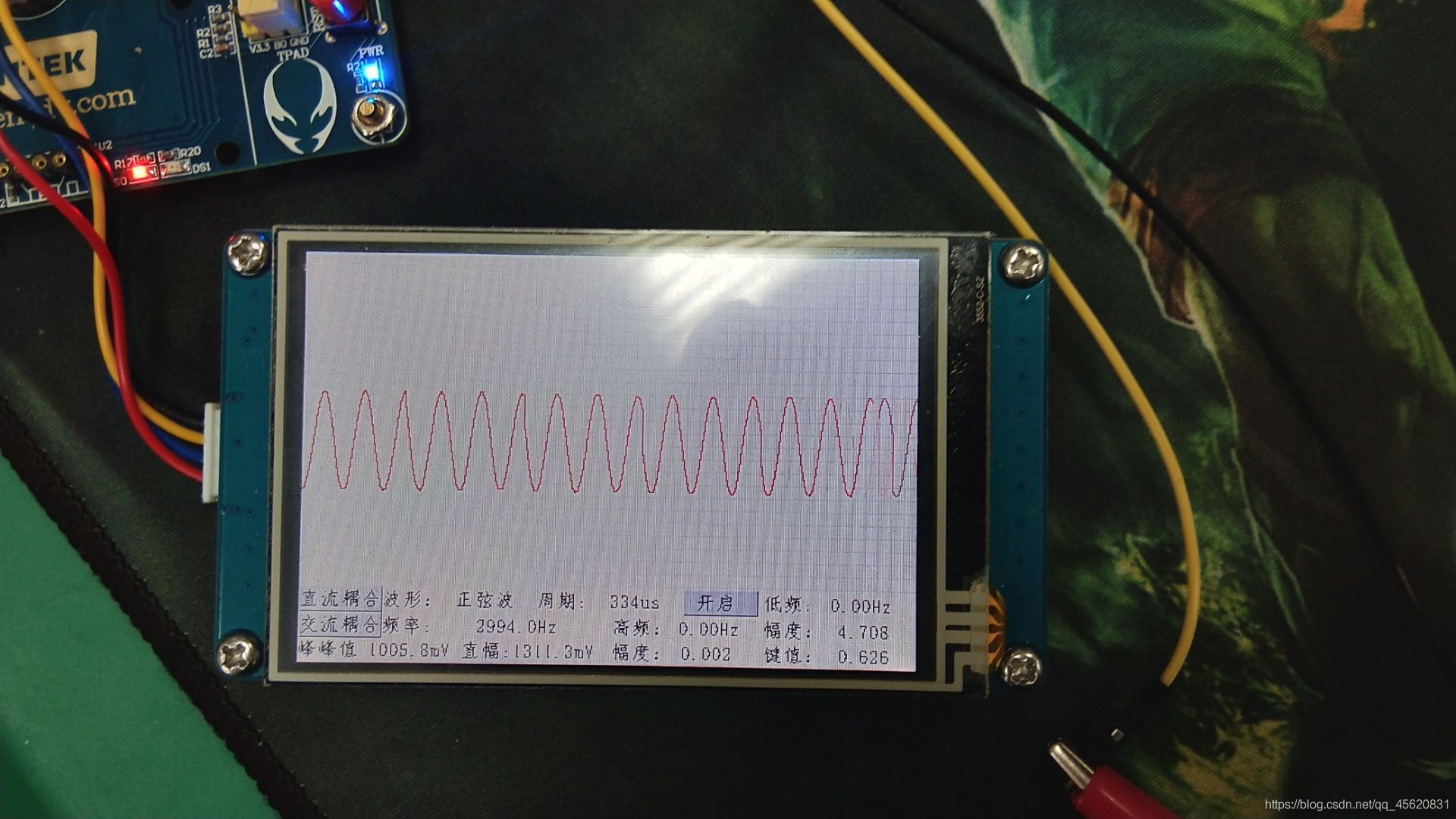
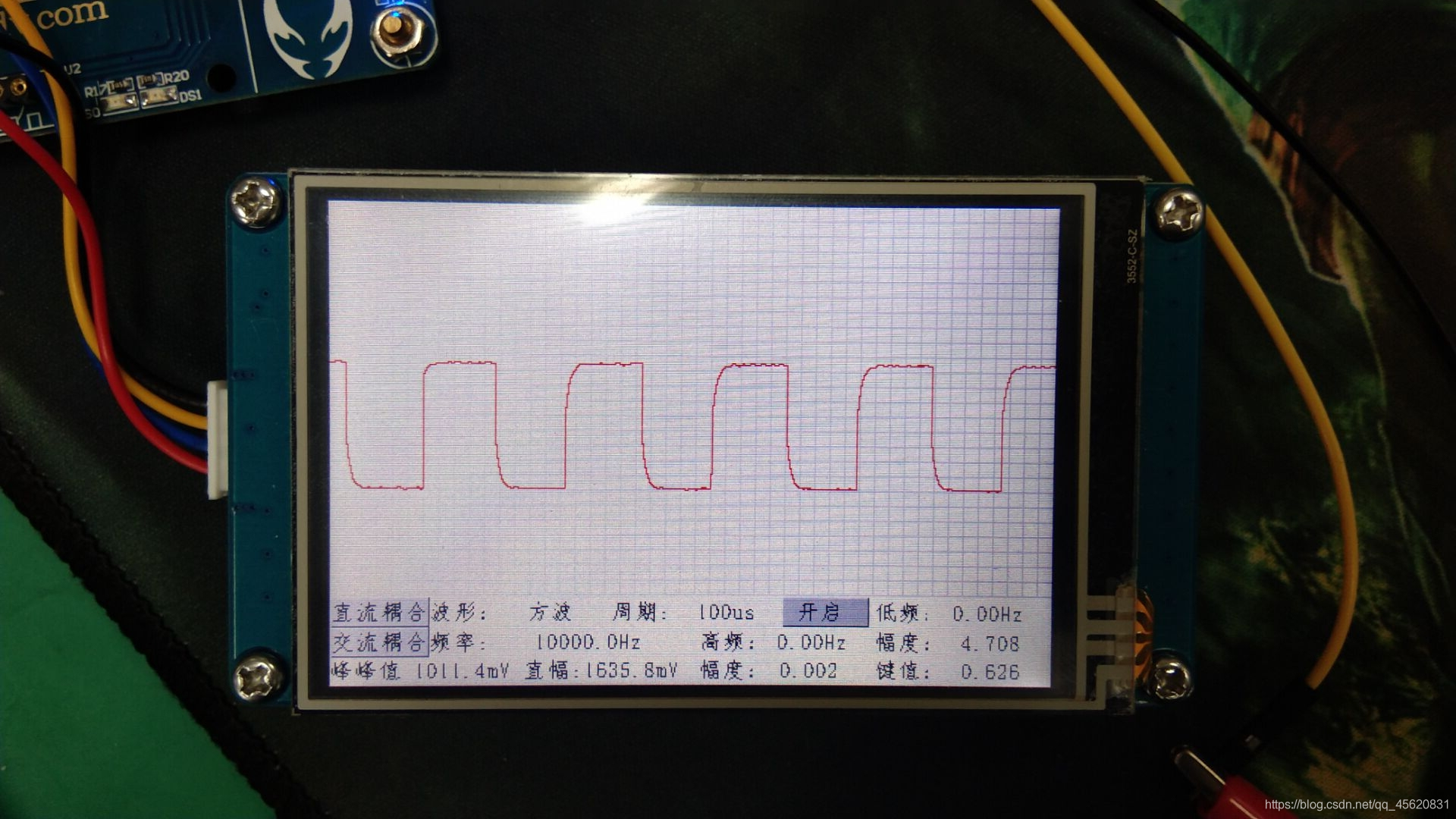
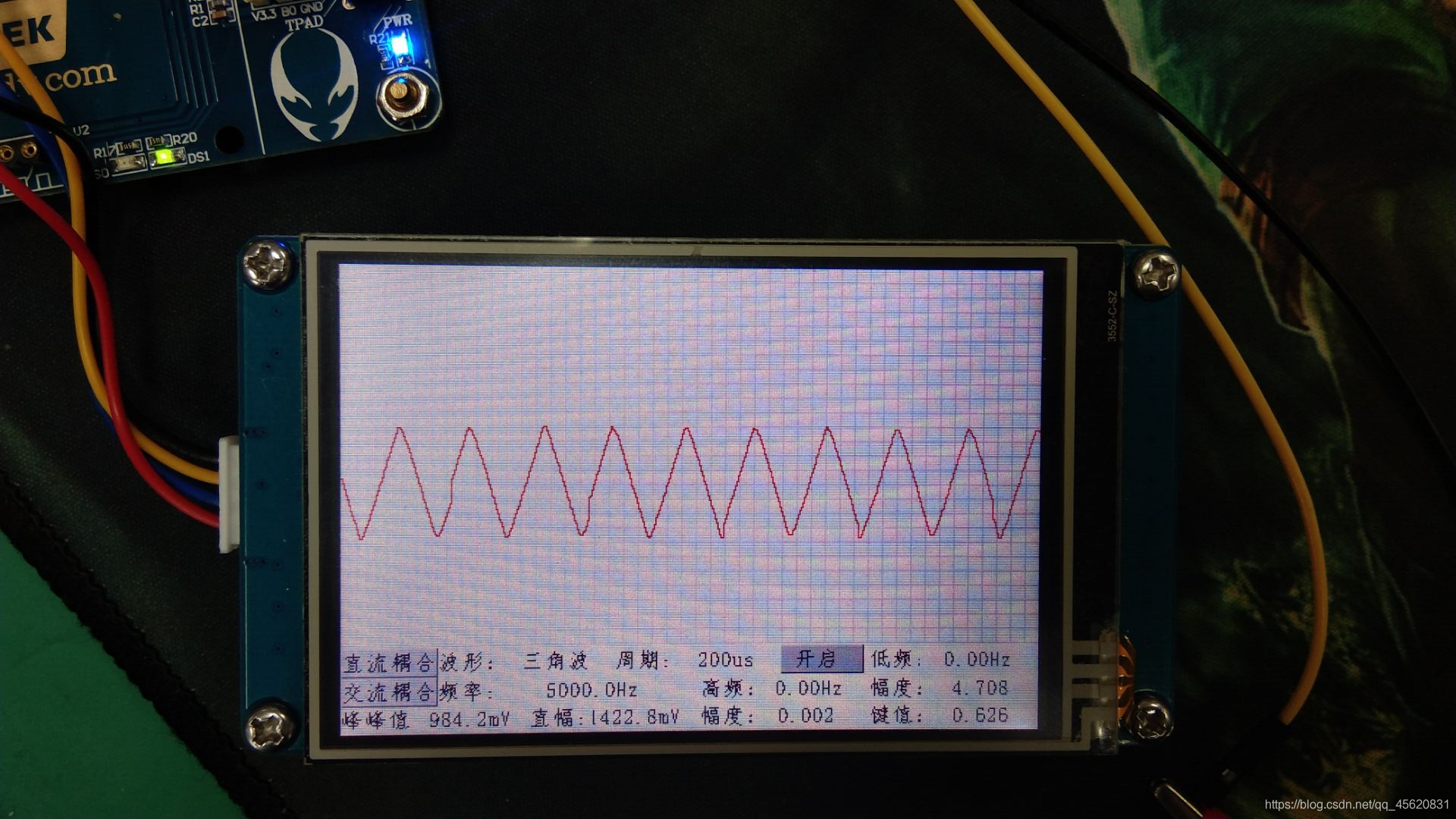
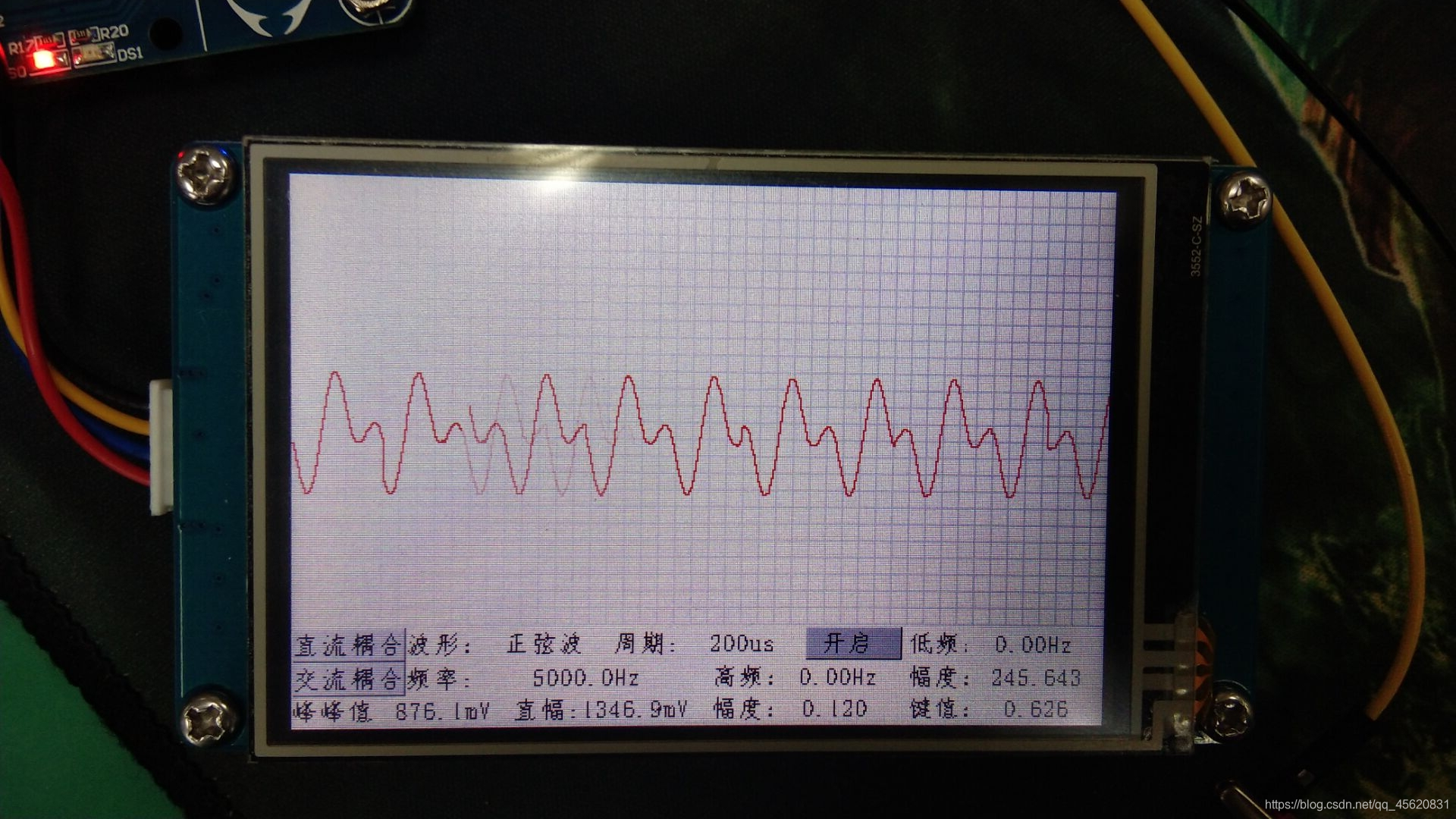
使用STM32F4系列单片机(本次使用的是STM32F429,此程序F4全系列使用,只需注意修改好主频就行了)加陶晶驰3.5寸T0系列串口屏,由触摸屏上的按键开启测量,然后显示信号峰峰值,频率,画出波形,判断波形。对频率变化的信号测量频率后确定时钟触发频率,即确定了采样率,用ADC双通道测量两路信号,用DMA传输至一个数组内存中,然后显示波形、计算Vpp、并对数据进行FFT,分析频谱确定波形名称(可判断正弦波,三角波,方波,脉冲波(有误差),锯齿波,等幅DTMF)
问题分析
用单片机自带的ADC对信号进行采样时,经常会碰到信号幅度太小或者太大的问题,这个很好解决,用一个自动增益控制的电路的电路即可解决。(点击链接至自动增益电路篇:)
但是对于一个频率变化范围较大的信号,若是用固定的频率去采样,首先,对于时域上,采样率可能过低导致波形失真,频谱发生混叠,过高,占用较大存储内存,难以存储较多周期的波形,进行FFT后,导致频率分辨率过低。
所以对一个规则信号,如正弦波,方波,三角波等,要先确定其频率,(1-500kHz可测)这个频率运用MCU的输入捕获功能,可以测量到非常精准的程度,对一个不规则信号,如DTMF,可以大致获得其频率。这样就能在有限采样点数下获得较好的频率分辨率了。
输入捕获测频率
将一个规则信号送进一个输入捕获管脚,规则信号处理好幅度后可以直接送进IO口,实测不会影响捕获,当然也可以选择将信号送进一个过零比较器,比较出方波后输出一个TTL电平送给单片机,更为稳妥准确。
话不多说,上代码:
TIM_HandleTypeDef TIM5_Handler;
//定时器5句柄 8990
//定时器5通道1输入捕获配置
//arr:自动重装值(TIM2,TIM5是32位的!!)
//psc:时钟预分频数
void TIM5_CH1_Cap_Init(__IO uint32_t arr,__IO uint16_t psc)
{
TIM_IC_InitTypeDef TIM5_CH1Config;
TIM5_Handler.Instance=TIM5; //通用定时器5
TIM5_Handler.Init.Prescaler=psc; //分频系数
TIM5_Handler.Init.CounterMode=TIM_COUNTERMODE_UP;
//向上计数器
TIM5_Handler.Init.Period=arr;
//自动装载值
TIM5_Handler.Init.ClockDivision=TIM_CLOCKDIVISION_DIV1;
//时钟分频因子
HAL_TIM_IC_Init(&TIM5_Handler);
//初始化输入捕获时基参数
TIM5_CH1Config.ICPolarity=TIM_ICPOLARITY_RISING;
//上升沿捕获
TIM5_CH1Config.ICSelection=TIM_ICSELECTION_DIRECTTI;
//映射到TI1上
TIM5_CH1Config.ICPrescaler=TIM_ICPSC_DIV1;
//配置输入分频,不分频
TIM5_CH1Config.ICFilter=0110;
//配置输入滤波器,滤波后更稳定
HAL_TIM_IC_ConfigChannel(&TIM5_Handler,&TIM5_CH1Config,TIM_CHANNEL_1);
//配置TIM5通道1
HAL_TIM_IC_Start_IT(&TIM5_Handler,TIM_CHANNEL_1);
//开启TIM5的捕获通道1,并且开启捕获中断
__HAL_TIM_ENABLE_IT(&TIM5_Handler,TIM_IT_UPDATE);
//使能更新中断
}
void HAL_TIM_IC_MspInit(TIM_HandleTypeDef *htim)
{
GPIO_InitTypeDef GPIO_Initure;
__HAL_RCC_TIM5_CLK_ENABLE(); //使能TIM5时钟
__HAL_RCC_GPIOA_CLK_ENABLE(); //开启GPIOA时钟
GPIO_Initure.Pin=GPIO_PIN_0; //PA0
GPIO_Initure.Mode=GPIO_MODE_AF_PP; //复用推挽输出
GPIO_Initure.Pull=GPIO_PULLDOWN; //下拉
GPIO_Initure.Speed=GPIO_SPEED_FAST; //快速
GPIO_Initure.Alternate=GPIO_AF2_TIM5; //PA0复用为TIM5通道1
HAL_GPIO_Init(GPIOA,&GPIO_Initure);
HAL_NVIC_SetPriority(TIM5_IRQn,2,0); //设置中断优先级,抢占优先级2,子优先级0
HAL_NVIC_EnableIRQ(TIM5_IRQn); //开启ITM5中断通道 }
基础的配置,注释都已经说明,中断优先级设置较低,影响不大,因为我每次测完后都关闭,再次循环时再开启。
中断服务函数因篇幅有限未放出,可以私信联系我发完整代码。
触发ADC的时钟配置
TIM_HandleTypeDef htim3;
/* TIM3 init function */
void MX_TIM3_Init(void)
{
TIM_ClockConfigTypeDef sClockSourceConfig;
TIM_MasterConfigTypeDef sMasterConfig;
htim3.Instance = TIM3;
htim3.Init.Prescaler =89-1; //1MHz频率
htim3.Init.CounterMode = TIM_COUNTERMODE_UP;
htim3.Init.Period =250-1; //默认时钟触发频率,此时AD采样率为4k
htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1; //不分频
HAL_TIM_Base_Init(&htim3);
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL; //选择内部时钟
HAL_TIM_ConfigClockSource(&htim3, &sClockSourceConfig);
sMasterConfig.MasterOutputTrigger = TIM_TRGO_UPDATE; //更新触发
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
HAL_TIMEx_MasterConfigSynchronization(&htim3, &sMasterConfig);
}
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef* htim_base)
{
if(htim_base->Instance==TIM3)
{
/* Peripheral clock enable */
__HAL_RCC_TIM3_CLK_ENABLE();
}
}
void HAL_TIM_Base_MspDeInit(TIM_HandleTypeDef* htim_base)
{
if(htim_base->Instance==TIM3)
{
/* Peripheral clock disable */
__HAL_RCC_TIM3_CLK_DISABLE();
}
}
这里需要注意的是预分频系数,和自动重装载值的设置,触发AD采样的频率为90M/(Prescaler*Period)90M是TIM3的时钟频率,预分频系数Prescaler建议固定不动,每次通过修改period来改变触发频率。由于代码篇幅实在过大,仅介绍关键部分。
ADC+DMA配置
void MX_ADC1_Init(void)
{
ADC_ChannelConfTypeDef sConfig;
/**Configure the global features of the ADC (Clock, Resolution, Data Alignment and number of conversion)
*/
hadc1.Instance = ADC1;
hadc1.Init.ClockPrescaler = ADC_CLOCK_SYNC_PCLK_DIV4; //90M/4=22.5M 超过36M准确度会下降
hadc1.Init.Resolution = ADC_RESOLUTION_12B;
hadc1.Init.ScanConvMode = ENABLE;
hadc1.Init.ContinuousConvMode = DISABLE;
hadc1.Init.DiscontinuousConvMode = DISABLE; //触发单次转换,故设置为DISABLE
hadc1.Init.ExternalTrigConvEdge = ADC_EXTERNALTRIGCONVEDGE_RISING;
hadc1.Init.ExternalTrigConv = ADC_EXTERNALTRIGCONV_T3_TRGO;
hadc1.Init.DataAlign = ADC_DATAALIGN_RIGHT;
hadc1.Init.NbrOfConversion = 2;
hadc1.Init.DMAContinuousRequests = ENABLE;
hadc1.Init.EOCSelection = ADC_EOC_SINGLE_CONV;
HAL_ADC_Init(&hadc1);
/**Configure for the selected ADC regular channel its corresponding rank in the sequencer and its sample time.
*/
sConfig.Channel = ADC_CHANNEL_5; //先采5通道,再采6通道
sConfig.Rank = 1;
sConfig.SamplingTime = ADC_SAMPLETIME_15CYCLES; //15个采样周期 Tconv=28+12周期 以满足最高400K采样率
HAL_ADC_ConfigChannel(&hadc1, &sConfig);
sConfig.Channel = ADC_CHANNEL_6;
sConfig.Rank = 2;
sConfig.SamplingTime = ADC_SAMPLETIME_15CYCLES;
HAL_ADC_ConfigChannel(&hadc1, &sConfig);
}
void HAL_ADC_MspInit(ADC_HandleTypeDef* hadc)
{
GPIO_InitTypeDef GPIO_InitStruct;
if(hadc->Instance==ADC1)
{
/* USER CODE BEGIN ADC1_MspInit 0 */
/* USER CODE END ADC1_MspInit 0 */
/* Peripheral clock enable */
__HAL_RCC_ADC1_CLK_ENABLE();
/**ADC1 GPIO Configuration
PA5 ------> ADC1_IN5
PA6 ------> ADC1_IN6
*/
GPIO_InitStruct.Pin = GPIO_PIN_5|GPIO_PIN_6; //A线时钟去MX_GPIO_Init开启
GPIO_InitStruct.Mode = GPIO_MODE_ANALOG;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* ADC1 DMA Init */
/* ADC1 Init */
hdma_adc1.Instance = DMA2_Stream0;
hdma_adc1.Init.Channel = DMA_CHANNEL_0;
hdma_adc1.Init.Direction = DMA_PERIPH_TO_MEMORY; //传输方向为外设到内存
hdma_adc1.Init.PeriphInc = DMA_PINC_DISABLE; //外设只有一个ADC,所以不递增
hdma_adc1.Init.MemInc = DMA_MINC_ENABLE; //存储地址要递增
hdma_adc1.Init.PeriphDataAlignment = DMA_PDATAALIGN_HALFWORD; //每次传输半字即可,即16位
hdma_adc1.Init.MemDataAlignment = DMA_MDATAALIGN_HALFWORD;
hdma_adc1.Init.Mode = DMA_CIRCULAR; //开启循环传输
hdma_adc1.Init.Priority = DMA_PRIORITY_HIGH;
hdma_adc1.Init.FIFOMode = DMA_FIFOMODE_DISABLE;
HAL_DMA_Init(&hdma_adc1);
__HAL_LINKDMA(hadc,DMA_Handle,hdma_adc1); //把DMA和ADC链接起来,这样ADC每转换完一个数据,就触发DMA传输。
需要注意的是触发选择外部触发,双通道转换要设置扫描模式使能,因为是用时钟触发,所以关闭连续转换。双通道所以NbrOfConversion设置为2,开启DMA请求。单次转换完成触发。
设置转换时间的时候要注意,转换时间越长越精确,但是每触发一次要进行两个通道的转换,这两个通道的转换时间之和一定要小于时钟触发的间隔。
关于DMA的传输开始和停止问题,有一个函数可以同时开启ADC和DMA传输中断:
HAL_ADC_Start_DMA(&hadc1,(uint32_t*)&ADC_DMA_ConvertedValue,8192); 意思就是开启转换和传输,把ADC1的数据传输到ADC_DMA_ConvertedValue这个数组里,注意使用这个函数时,一定要加强制转换符(uint32_t*),这是HAL库自己定义的,即使我们定义的数组为16位。
传输完8192个数据停止DMA传输并进入中断,这个HAL库里有一个专门的中断函数:
void HAL_ADC_ConvCpltCallback(ADC_HandleTypeDef* hadc) 在中断里面做自己想做的事情就可以了。
main函数,整体思想的体现
放代码在这感觉很累赘,暂时不放了,直接说设计思想:
- 在ADC_DMA传输完成中断里设置一个完成标志,每次传输完把这个标志置为一,然后在main函数的while(1)里循环检测,检测到之后就进行数据处理,处理完再把标志设置为0。
- UART用于接受和发送数据给串口屏,同样设置接受中断标志,用来检测串口屏上的按键。
- 通过捕获获取信号频率,设置自动重装载值,(设置多少可根据自己的需求定),开启TIM3时钟,触发AD转换。
- 数据采集完成后显示波形,计算峰峰值,调用DSP库进行FFT,得到频率上的信息。
- 波形判断是利用信号二次谐波和基波分量之比,利用各个波形的比值不同去判断波形,每种波形的具体比值可以用示波器测量开启FFT测算。
**总结:**其实对于这类项目,最重要的是如何把数据按自己想要的形式采集并放进所建立的数组中,关键就是采样率的设置,因为这个直接关系到FFT后的精度问题。数据采集到了,怎么去处理,那就是随心所欲了,就可以尽情发挥自己的数学天赋,从这若干个数据中获得自己想要的信息。
晒几张测试图

需要完整代码的私信我。
有问题的也可以留言,看到都会给解答。
创作不易,觉得有帮助的伙伴点个赞好不好,您的点赞是我继续创作的动力。
谢谢朋友们!
