一、仿真要求
要求一:编写两个函数TOA_LLOP和TOA_CHAN得到位置的估计。
要求二:用RMSE实现两种算法的性能比较, 得到两种算法的RMSE曲线对比图,横坐标为噪声方差,纵坐标为RMSE。
二、仿真方案的设计、仿真结果及结论
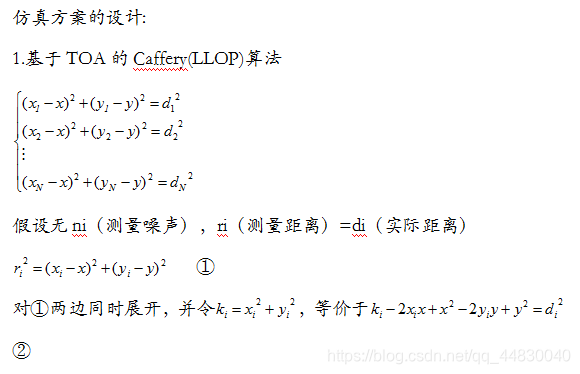
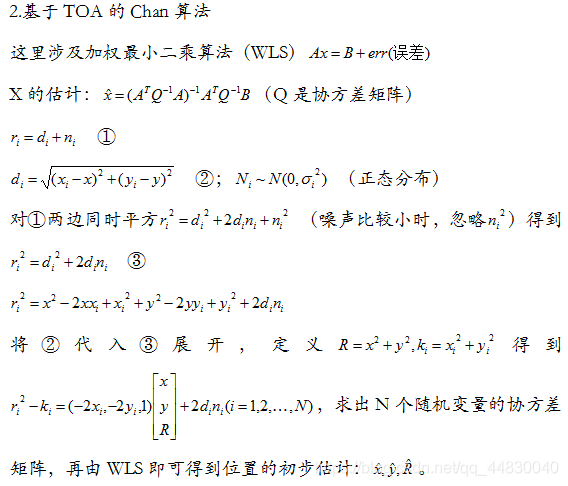
1.仿真方案的设计



2.仿真结果

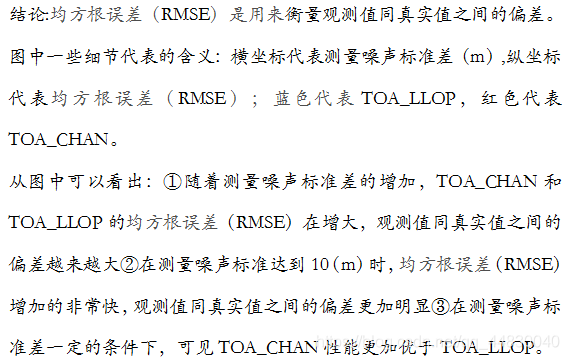
3.仿真结论
三、主要仿真代码
函数TOA_LLOP:
function theta=TOALLOP(A,p,j)
%A是BBS的坐标
%p是范围测量
%j是参考BS的索引
[m,~]=size(A); %size得到A的行列数赋值给[m,~],~表示占位,就是只要行m的值!
k=sum(A.^2,2);%矩阵A每个元素分别平方,得到新矩阵,在行求和,最为矩阵K
k1=k([1:j-1,j+1:m],:); %取出J行
A1=A([1:j-1,j+1:m],:); %取出J行
A2=A1-ones(m-1,1)*A(j,:); %得到D,就是j行与其余行对应值相减
p1=p([1:j-1,j+1:m],:); %取出J行
p2=p(j).^2*ones(m-1,1)-p1.^2-(k(j)*ones(m-1,1)-k1); %得到b,(Rn*Rn-R1*R1-Kn+K1)其中Kn为对应第n个x^2+y^2
theta=1/2*inv(A2'*A2)*A2'*p2; %利用最小二乘解,得
theta=theta';%转换为(x,y)形式
函数TOA_CHAN:
function theta=TOACHAN(A,p,sigma)
%A是BBS的坐标
%P是范围测量
%sigma是TOA测量的方差
[m,~]=size(A); %size得到A的行列数赋值给[m,~],~表示占位,就是只要行m的值!
k=sum(A.^2,2); %矩阵A每个元素分别平方,得到新矩阵,在行求和,最为矩阵K
A1=[-2*A,ones(m,1)]; %-2乘以矩阵A与一个m*1的全一矩阵,组成新矩阵A1,也就是Gn
p1=p.^2-k; %得到h
B1=diag(2*p);%得到B,基站与移动台的真实值
Q1=diag(ones(m,1)*sigma); %TOA协方差矩阵
cov1=B1*Q1*B1; %由于B1中有2,此处就可以省略4
theta1=inv(A1'*inv(cov1)*A1)*A1'*inv(cov1)*p1; %得到Za,因为B中包含MS与个基站之间的距离,Q1是未知量,需进一步近似
cov_theta1=inv(A1'*inv(cov1)*A1); %上式采用扰动算法得
A2=[1,0;0,1;1,1]; %得到Ga‘
p2=[theta1(1,1)^2;
theta1(2,1)^2;
theta1(3,1)]; %得到h‘
B2=diag([2*theta1(1,1);
2*theta1(2,1);1]); %得到B’
cov2=B2*cov_theta1*B2; %误差向量的协方差矩阵
theta2=inv(A2'*inv(cov2)*A2)*A2'*inv(cov2)*p2; %运用最大似然估计得到
theta=sign(theta1(1:2,:)).*theta2.^(1/2); %得到MS位置的估计值坐标,以及符号
theta=theta';%转换为(x,y)形式
要求二:用RMSE实现两种算法的性能比较, 得到两种算法的RMSE曲线对比图,横坐标为噪声方差,纵坐标为RMSE。
%TOA定位算法性能仿真
clear all;
clc;
%接收机的位置坐标,简单实验就可采用少量样本,精准实验必须采用大量样本数量
BS1=[0,0];
BS2=[500,0];
BS3=[500,500];
BS4=[0,500];
BS5=[500,250];%模拟5个基站
MS=[200,200]; %移动台MS的估计位置
std_var=[1e-2,1e-1,1,1e1,1e2]; %范围矩阵
%A=[BS1;BS2;BS3;BS4]; %矩阵A包含基站的坐标
%A=[BS1;BS2;BS3];
A=[BS1;BS2;BS3;BS4;BS5];%矩阵A包含基站的坐标
number=10000;
for j=1:length(std_var) %从1循环到std_var的长度
error1=0;%初始误差为0
error2=0; %初始误差为0
std_var1=std_var(j);
for i=1:number %多次循环
%r1=A-ones(4,1)*MS; %矩阵A减去4*1的全一矩阵乘以MS
%r1=A-ones(3,1)*MS;
r1=A-ones(5,1)*MS;
r2=sum(r1.^2,2); %矩阵r1每个元素分别平方,得到新矩阵,在行求和,最为矩阵r2
%r=r2.^(1/2)+std_var1*randn(4,1); %从移动到位置MS发射信号到达基站i的TOA测量值
%r=r2.^(1/2)+std_var1*randn(3,1);
r=r2.^(1/2)+std_var1*randn(5,1);
theta1=TOALLOP(A,r,1); % 调用TOALLOP函数
theta2=TOACHAN(A,r,std_var1^2); % 调用TOACHAN函数
error1=error1+norm(MS-theta1)^2; %norm是返回MS-theta1的最大奇异值,即max(svd(MS-theta1)),
error2=error2+norm(MS-theta2)^2; %移动台MS估计位置与计算的到的距离的平方
end
RMSE1(j)=(error1/number)^(1/2); %求TOALLOP均方根误差
RMSE2(j)=(error2/number)^(1/2);%求TOACHAN均方根误差
end
% 绘图
semilogx(std_var,RMSE1,'-O',std_var,RMSE2,'-s') %x轴取对数,X轴范围是1e-2到1e2,Y轴的范围是变动的
xlabel('测量噪声标准差(m) ');
legend('TOALLOP','TOACHAN');
ylabel('RMSE');
legend('TOA-LLOP','TOA-CHAN')
- 本次的TOA定位算法性能仿真已经完成,有不足欢迎评论,加油!