若该文为原创文章,未经允许不得转载
原博主博客地址:https://blog.csdn.net/qq21497936
原博主博客导航:https://blog.csdn.net/qq21497936/article/details/102478062
本文章博客地址:https://blog.csdn.net/qq21497936/article/details/106755662
各位读者,知识无穷而人力有穷,要么改需求,要么找专业人士,要么自己研究
红胖子(红模仿)的博文大全:开发技术集合(包含Qt实用技术、树莓派、三维、OpenCV、OpenGL、ffmpeg、OSG、单片机、软硬结合等等)持续更新中…(点击传送门)
OpenCV开发专栏(点击传送门)
上一篇:《OpenCV开发笔记(六十二):红胖子8分钟带你深入了解亚像素角点检测(图文并茂+浅显易懂+程序源码)》
下一篇:《OpenCV开发笔记(六十四):红胖子8分钟带你深入了解SURF特征点(图文并茂+浅显易懂+程序源码)》
前言
红胖子,来也!
识别除了传统的模板匹配之外就是体征点了,此篇介绍了SIFT特征点提取使用方法。
Demo




SIFT特征点
概述
SIFT,即尺度不变特征变换(Scale-invariant feature transform,SIFT),是用于图像处理领域的一种描述。这种描述具有尺度不变性,可在图像中检测出关键点,是一种局部特征描述子。
SIFT算法特点
- SIFT特征是局部特征,其对旋转、尺度缩放、亮度变化保持不变性,对视角变化、仿射变换、噪声也保持一定程度的稳定性;
- 区分性(Distinctiveness)好,信息量丰富,适用于在海量特征数据库中进行快速、准确的匹配;
- 多量性,即使少数的几个物体也可以产生大量的SIFT特征向量;
- 高速性,经优化的SIFT匹配算法甚至可以达到实时的要求;
- 可扩展性,可以很方便的与其他形式的特征向量进行联合;
特征检测步骤
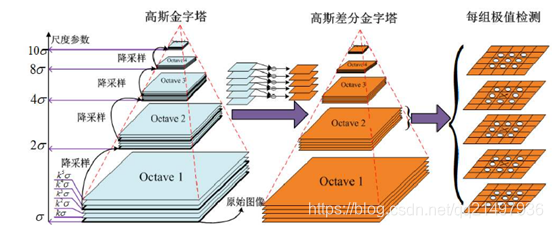
步骤一:尺度空间极值检测
搜索所有尺度上的图像位置。通过高斯微分函数来识别潜在的对于尺度和旋转不变的兴趣点。
过程了解,知道实现的基本原理,如下图:
步骤二:关键点定位
在每个候选的位置上,通过一个拟合精细的模型来确定位置和尺度。关键点的选择依据于它们的稳定程度。
采用的方法是LoG近似DoG找到关键点<检测DOG尺度空间极值点>
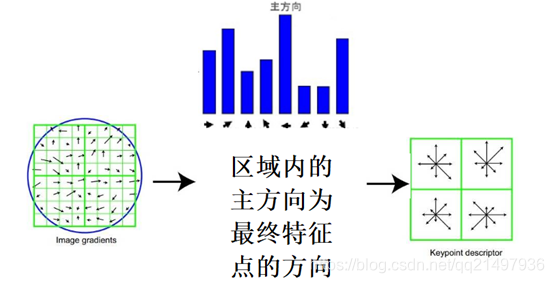
步骤三:方向确定
基于图像局部的梯度方向,分配给每个关键点位置一个或多个方向。所有后面的对图像数据的操作都相对于关键点的方向、尺度和位置进行变换,从而提供对于这些变换的不变性。
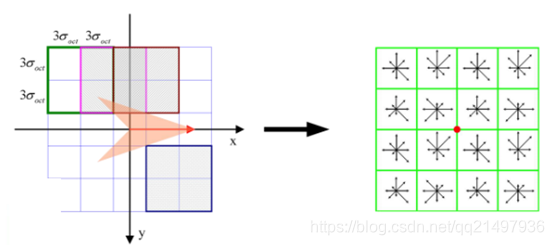
步骤四:关键点描述
在每个关键点周围的邻域内,在选定的尺度上测量图像局部的梯度。这些梯度被变换成一种表示,这种表示允许比较大的局部形状的变形和光照变化。
每一个关键点,都拥有位置、尺度以及方向三个信息。为每个关键点建立一个描述符,用一组向量将这个关键点描述出来,使其不随各种变化而改变,比如光照变化、视角变化等等。这个描述子不但包括关键点,也包含关键点周围对其有贡献的像素点,并且描述符应该有较高的独特性,以便于提高特征点正确匹配的概率。
SiftFeatureDetector类
该类是opencv中nonfree模块中的,之前没有勾选,需要需要重新勾选编译才会有的,所以按照3.4的最新版本为3.4.10,笔者重新编译了一个版本,带contrib模块,编译请参考博文《OpenCV开发笔记(三十四):红胖子带你小白式编译Qt+openCV3.4.1+opencv_contrib(全网最简单最强,可读性最高,没有之一)》,配置时,需要额外勾选下图显示的项:
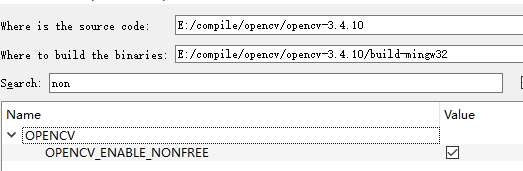
编译好后,头文件和库替换,重新连接到3.4.10版本,使用sift。
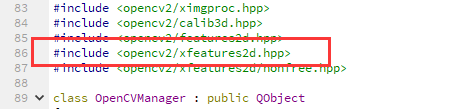
需要添加头文件:
#include <opencv2/xfeatures2d.hpp>
SiftFeatureDetector类的使用
cv::Ptr<cv::xfeatures2d::SIFT> _pSift = cv::xfeatures2d::SiftFeatureDetector::create();
std::vector<cv::KeyPoint> keyPoints1;
//特征点检测
_pSift->detect(srcMat, keyPoints1);
SIFT宏定义
typedef SIFT SiftFeatureDetector;
typedef SIFT SiftDescriptorExtractor;
SIFT相关函数原型
static Ptr<xfeatures2d::SIFT> create(int nfeatures = 0,
int nOctaveLayers = 3,
double contrastThreshold = 0.04,
double edgeThreshold = 10,
double sigma = 1.6);
- 参数一:int类型的nfeatures,默认值0,nfeatures要保留的最佳特征点数。这些特征是按分数排列的(用SIFT算法作为局部对比度);
- 参数二:int类型的nOctaveLayers,默认值3,每八度音阶的层数。3是D.Lowe纸张中使用的值。这个八度音阶数是根据图像分辨率自动计算出来的;
- 参数三:double类型的contrastThreshold,默认值0.04,用于半均匀滤除弱特征的对比度阈值(低对比度)区域。阈值越大,检测器产生的特征越少;
- 参数四:double类型的edgeThreshold,默认值10,用于滤除边缘状特征的阈值。注意它的含义与对比度阈值不同,即边缘阈值越大,特征越少过滤掉(保留更多功能)。
- 参数五:double类型的sigma,默认值1.6,高斯的sigma,应用于输入图像的标准偏差。
void xfeatures2d::SIFT::detect( InputArray image,
std::vector<KeyPoint>& keypoints,
InputArray mask=noArray() );
- 参数一:InputArray类型的image,输入cv::Mat;
- 参数二:std::Vector类型的keypoints,检测到的关键点;
- 参数三:InputArray类型的mask,默认为空,指定在何处查找关键点的掩码(可选)。它必须是8位整数感兴趣区域中具有非零值的矩阵。
void xfeatures2d::SIFT::compute( InputArray image,
std::vector<KeyPoint>& keypoints,
OutputArray descriptors );
- 参数一:InputArray类型的image,输入cv::Mat;
- 参数二:std::Vector类型的keypoints,描述符不能为其已删除计算的。有时可以添加新的关键点,例如:SIFT duplicates keypoint有几个主要的方向(每个方向);
- 参数三:OutputArray类型的descriptors,计算描述符;
// 该函数结合了detect和compute,参照detect和compute函数参数
void xfeatures2d::SIFT::detectAndCompute( InputArray image,
InputArray mask,
std::vector<KeyPoint>& keypoints,
OutputArray descriptors,
bool useProvidedKeypoints=false );
绘制关键点函数原型
void drawKeypoints( InputArray image,
const std::vector<KeyPoint>& keypoints,
InputOutputArray outImage,
const Scalar& color=Scalar::all(-1),
int flags=DrawMatchesFlags::DEFAULT );
- 参数一:InputArray类型的image,;
- 参数二:std::Vector类型的keypoints,原图的关键点;
- 参数三:InputOutputArray类型的outImage,其内容取决于定义在输出图像。请参阅参数五的标志flag);
- 参数四:cv::Scalar类型的color,绘制关键点的颜色,默认为Scalar::all(-1)随机颜色,每个点都是这个颜色,那么随机时,每个点都是随机的;
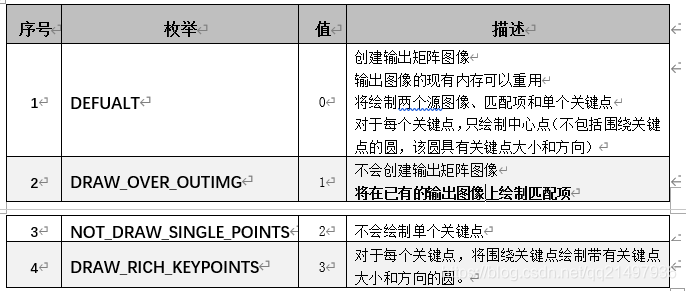
- 参数五:int类型的flags,默认为DEFAULT,具体参照DrawMatchesFlags枚举如下:
相关博客
本源码中包含了“透视变换”,请参照博文《OpenCV开发笔记(五十一):红胖子8分钟带你深入了解透视变换(图文并茂+浅显易懂+程序源码)》
Demo源码
void OpenCVManager::testSiftFeatureDetector()
{
QString fileName1 = "16.jpg";
int width = 400;
int height = 300;
cv::Mat srcMat = cv::imread(fileName1.toStdString());
cv::resize(srcMat, srcMat, cv::Size(width, height));
cv::String windowName = _windowTitle.toStdString();
cvui::init(windowName);
cv::Mat windowMat = cv::Mat(cv::Size(srcMat.cols * 2, srcMat.rows * 3),
srcMat.type());
cv::Ptr<cv::xfeatures2d::SIFT> _pSift = cv::xfeatures2d::SiftFeatureDetector::create();
int k1x = 0;
int k1y = 0;
int k2x = 100;
int k2y = 0;
int k3x = 100;
int k3y = 100;
int k4x = 0;
int k4y = 100;
while(true)
{
windowMat = cv::Scalar(0, 0, 0);
cv::Mat mat;
// 原图先copy到左边
mat = windowMat(cv::Range(srcMat.rows * 1, srcMat.rows * 2),
cv::Range(srcMat.cols * 0, srcMat.cols * 1));
cv::addWeighted(mat, 0.0f, srcMat, 1.0f, 0.0f, mat);
{
std::vector<cv::KeyPoint> keyPoints1;
std::vector<cv::KeyPoint> keyPoints2;
cvui::printf(windowMat, 0 + width * 1, 10 + height * 0, "k1x");
cvui::trackbar(windowMat, 0 + width * 1, 20 + height * 0, 165, &k1x, 0, 100);
cvui::printf(windowMat, 0 + width * 1, 70 + height * 0, "k1y");
cvui::trackbar(windowMat, 0 + width * 1, 80 + height * 0, 165, &k1y, 0, 100);
cvui::printf(windowMat, width / 2 + width * 1, 10 + height * 0, "k2x");
cvui::trackbar(windowMat, width / 2 + width * 1, 20 + height * 0, 165, &k2x, 0, 100);
cvui::printf(windowMat, width / 2 + width * 1, 70 + height * 0, "k2y");
cvui::trackbar(windowMat, width / 2 + width * 1, 80 + height * 0, 165, &k2y, 0, 100);
cvui::printf(windowMat, 0 + width * 1, 10 + height * 0 + height / 2, "k3x");
cvui::trackbar(windowMat, 0 + width * 1, 20 + height * 0 + height / 2, 165, &k3x, 0, 100);
cvui::printf(windowMat, 0 + width * 1, 70 + height * 0 + height / 2, "k3y");
cvui::trackbar(windowMat, 0 + width * 1, 80 + height * 0 + height / 2, 165, &k3y, 0, 100);
cvui::printf(windowMat, width / 2 + width * 1, 10 + height * 0 + height / 2, "k4x");
cvui::trackbar(windowMat, width / 2 + width * 1, 20 + height * 0 + height / 2, 165, &k4x, 0, 100);
cvui::printf(windowMat, width / 2 + width * 1, 70 + height * 0 + height / 2, "k4y");
cvui::trackbar(windowMat, width / 2 + width * 1, 80 + height * 0 + height / 2, 165, &k4y, 0, 100);
std::vector<cv::Point2f> srcPoints;
std::vector<cv::Point2f> dstPoints;
srcPoints.push_back(cv::Point2f(0.0f, 0.0f));
srcPoints.push_back(cv::Point2f(srcMat.cols - 1, 0.0f));
srcPoints.push_back(cv::Point2f(srcMat.cols - 1, srcMat.rows - 1));
srcPoints.push_back(cv::Point2f(0.0f, srcMat.rows - 1));
dstPoints.push_back(cv::Point2f(srcMat.cols * k1x / 100.0f, srcMat.rows * k1y / 100.0f));
dstPoints.push_back(cv::Point2f(srcMat.cols * k2x / 100.0f, srcMat.rows * k2y / 100.0f));
dstPoints.push_back(cv::Point2f(srcMat.cols * k3x / 100.0f, srcMat.rows * k3y / 100.0f));
dstPoints.push_back(cv::Point2f(srcMat.cols * k4x / 100.0f, srcMat.rows * k4y / 100.0f));
cv::Mat M = cv::getPerspectiveTransform(srcPoints, dstPoints);
cv::Mat srcMat2;
cv::warpPerspective(srcMat,
srcMat2,
M,
cv::Size(srcMat.cols, srcMat.rows),
cv::INTER_LINEAR,
cv::BORDER_CONSTANT,
cv::Scalar::all(0));
mat = windowMat(cv::Range(srcMat.rows * 1, srcMat.rows * 2),
cv::Range(srcMat.cols * 1, srcMat.cols * 2));
cv::addWeighted(mat, 0.0f, srcMat2, 1.0f, 0.0f, mat);
//特征点检测
_pSift->detect(srcMat, keyPoints1);
//绘制特征点(关键点)
cv::Mat resultShowMat;
cv::drawKeypoints(srcMat,
keyPoints1,
resultShowMat,
cv::Scalar(0, 0, 255),
cv::DrawMatchesFlags::DRAW_RICH_KEYPOINTS);
mat = windowMat(cv::Range(srcMat.rows * 2, srcMat.rows * 3),
cv::Range(srcMat.cols * 0, srcMat.cols * 1));
cv::addWeighted(mat, 0.0f, resultShowMat, 1.0f, 0.0f, mat);
//特征点检测
_pSift->detect(srcMat2, keyPoints2);
//绘制特征点(关键点)
cv::Mat resultShowMat2;
cv::drawKeypoints(srcMat2,
keyPoints2,
resultShowMat2,
cv::Scalar(0, 0, 255),
cv::DrawMatchesFlags::DRAW_RICH_KEYPOINTS);
mat = windowMat(cv::Range(srcMat.rows * 2, srcMat.rows * 3),
cv::Range(srcMat.cols * 1, srcMat.cols * 2));
cv::addWeighted(mat, 0.0f, resultShowMat2, 1.0f, 0.0f, mat);
cv::imshow(windowName, windowMat);
}
// 更新
cvui::update();
// 显示
// esc键退出
if(cv::waitKey(25) == 27)
{
break;
}
}
}
工程模板:对应版本号v1.57.0
对应版本号v1.57.0
上一篇:《OpenCV开发笔记(六十二):红胖子8分钟带你深入了解亚像素角点检测(图文并茂+浅显易懂+程序源码)》
下一篇:《OpenCV开发笔记(六十四):红胖子8分钟带你深入了解SURF特征点(图文并茂+浅显易懂+程序源码)》
原博主博客地址:https://blog.csdn.net/qq21497936
原博主博客导航:https://blog.csdn.net/qq21497936/article/details/102478062
本文章博客地址:https://blog.csdn.net/qq21497936/article/details/106755662