若该文为原创文章,未经允许不得转载
原博主博客地址:https://blog.csdn.net/qq21497936
原博主博客导航:https://blog.csdn.net/qq21497936/article/details/102478062
本文章博客地址:https://blog.csdn.net/qq21497936/article/details/106257036
各位读者,知识无穷而人力有穷,要么改需求,要么找专业人士,要么自己研究
红胖子(红模仿)的博文大全:开发技术集合(包含Qt实用技术、树莓派、三维、OpenCV、OpenGL、ffmpeg、OSG、单片机、软硬结合等等)持续更新中…(点击传送门)
OpenCV开发专栏(点击传送门)
上一篇:《OpenCV开发笔记(五十七):红胖子8分钟带你深入了解直方图反向投影(图文并茂+浅显易懂+程序源码)》
下一篇:持续补充中…
红胖子,来也!
做识别,有时候需求要识别面积、距离能,若双瞳之间的距离,手机的宽高等等,图像的矩就是为这些需要识别具体标量的基础之一。

矩函数在图像分析中是必备的方法之一,应用广泛,如模式识别、目标分类、目标识别与方位估计、图像编码与重构等。一天个从一副数字图形中计算出来的矩集,通常描述了该图形形状的全局特征,并提供了大量的关于该图像不同类型的集合特性信息,比如大小、方向及形状等。
- 一阶矩:与形状有关;
- 二阶矩:显示曲线围绕直线平均值的扩展程度;
- 三阶矩:关于平均值的对称性的测量;
计算多边形和光山形状的最高达三阶的所有矩,可用来计算形状的中心、面积、主轴和其他形状特征。
Moments moments( InputArray array, bool binaryImage = false );
- 参数一:InputArray类型的array,输入参数可以是光栅图像(单通道、8位或浮点的二维数组)或二维数组(lN或NI);
- 参数二:bool类型的binaryImage,默认值false。若此参数取true,则所有非零像素为1。此参数仅对于图像使用;
注意:此参数的返回值是返回运行后的结果。
用于计算部分轮廓的面积或者整个轮廓。
doube contourArea (InputArray contour , bool oriented=false );
- 参数一:InputArray类型的contour,输入的向量,二维点(轮廓顶点),可以为std::vector或Mat类型;
- 参数二:bool类型的oriented,面向区域标识符。若其为true,该函数返回一个带符号的面积值,其正负取决于轮廓的方向(顺时针还是逆时针)。根据这个特性我们可以根据面积的符号来确定轮廓的位置。需要注意的是,这个参数有默认值false,表示以绝对值返回,不带符号;
double arcLength (InputArray curve , boo1 c1osed);
- 参数一:InputArray类型的curve,输入的二维点集,可以为std::vector或Mat类型;
- 参数二:bool类型的closed,一个用于指示曲线是否封闭的标识符,有默认值closed,表示曲线封闭;
void OpenCVManager::testMoments()
{
QString fileName1 =
"E:/qtProject/openCVDemo/openCVDemo/modules/openCVManager/images/15.jpg";
int width = 400;
int height = 300;
cv::Mat srcMat = cv::imread(fileName1.toStdString());
cv::resize(srcMat, srcMat, cv::Size(width, height));
cv::String windowName = _windowTitle.toStdString();
cvui::init(windowName);
cv::Mat windowMat = cv::Mat(cv::Size(srcMat.cols * 2, srcMat.rows * 3),
srcMat.type());
int threshold1 = 200;
int threshold2 = 100;
while(true)
{
windowMat = cv::Scalar(0, 0, 0);
cv::Mat mat;
cv::Mat dstMat;
cv::Mat grayMat;
cv::Mat tempMat;
cv::Mat hullMat;
hullMat = srcMat.clone();
// 原图先copy到左边
mat = windowMat(cv::Range(srcMat.rows * 0, srcMat.rows * 1),
cv::Range(srcMat.cols * 0, srcMat.cols * 1));
cv::addWeighted(mat, 0.0f, srcMat, 1.0f, 0.0f, mat);
{
// 灰度图
cv::cvtColor(srcMat, grayMat, CV_BGR2GRAY);
cv::cvtColor(grayMat, tempMat, CV_GRAY2BGR);
// copy
mat = windowMat(cv::Range(srcMat.rows * 1, srcMat.rows * 2),
cv::Range(srcMat.cols * 0, srcMat.cols * 1));
cv::addWeighted(mat, 0.0f, tempMat, 1.0f, 0.0f, mat);
cvui::printf(windowMat,
srcMat.rows * 1 + 100,
srcMat.cols * 0 + 20,
"threshold1");
cvui::trackbar(windowMat,
srcMat.rows * 1 + 100,
srcMat.cols * 0 + 50,
200,
&threshold1,
0,
255);
cvui::printf(windowMat,
srcMat.rows * 1 + 100,
srcMat.cols * 0 + 100, "threshold2");
cvui::trackbar(windowMat,
srcMat.rows * 1 + 100,
srcMat.cols * 0 + 130,
200,
&threshold2,
0,
255);
// 使用边缘检测
cv::Canny(grayMat, dstMat, threshold1, threshold2, 3);
// copy
mat = windowMat(cv::Range(srcMat.rows * 1, srcMat.rows * 2),
cv::Range(srcMat.cols * 1, srcMat.cols * 2));
cv::Mat rgbMat;
cv::cvtColor(dstMat, rgbMat, CV_GRAY2BGR);
cv::addWeighted(mat, 0.0f, rgbMat, 1.0f, 0.0f, mat);
// 寻找轮廓
std::vector<std::vector<cv::Point>> contours;
cv::findContours(dstMat, contours, cv::RETR_TREE, cv::CHAIN_APPROX_SIMPLE);
// 绘制轮廓
for(int index = 0; index < contours.size(); index++)
{
cv::drawContours(hullMat, contours, index, cv::Scalar(0, 0, 255), 2);
}
// copy
mat = windowMat(cv::Range(srcMat.rows * 2, srcMat.rows * 3),
cv::Range(srcMat.cols * 0, srcMat.cols * 1));
cv::addWeighted(mat, 0.0f, hullMat, 1.0f, 0.0f, mat);
// 计算图像所有的矩
std::vector<cv::Moments> mu(contours.size());
for(int index = 0; index < contours.size(); index++)
{
mu[index] = cv::moments(contours[index], false);
}
// 计算轮廓的面积
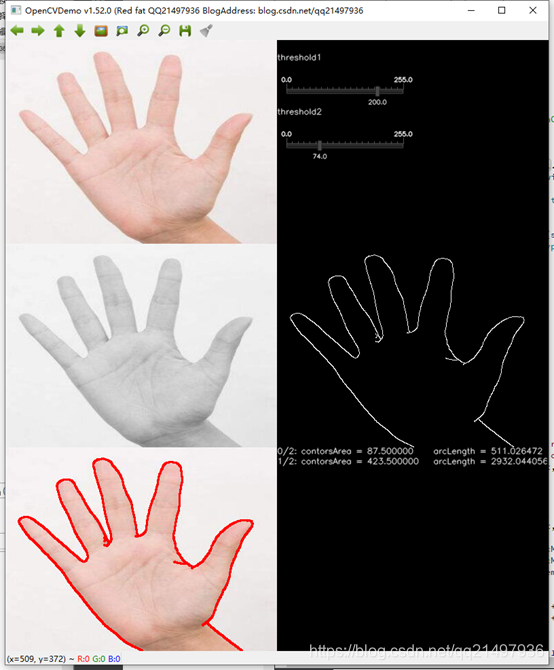
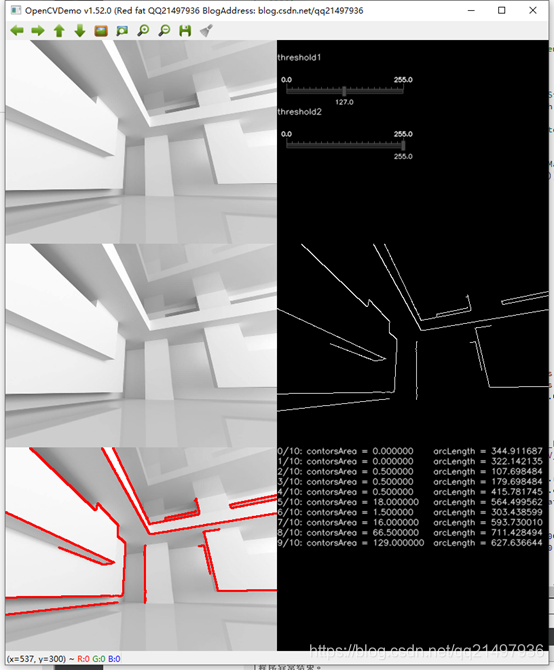
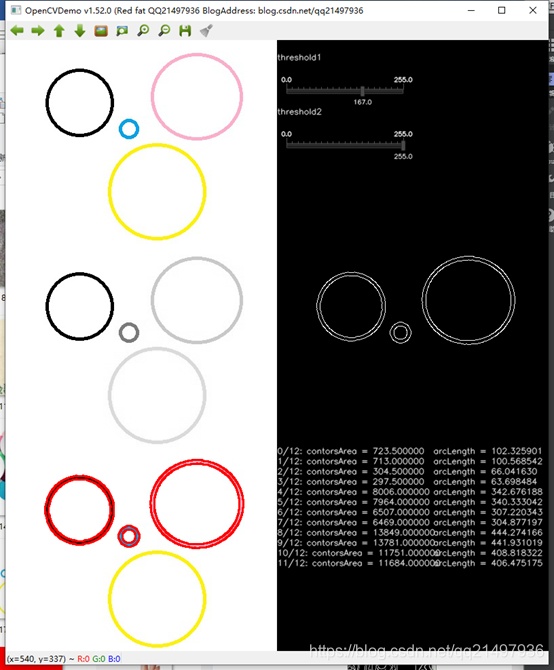
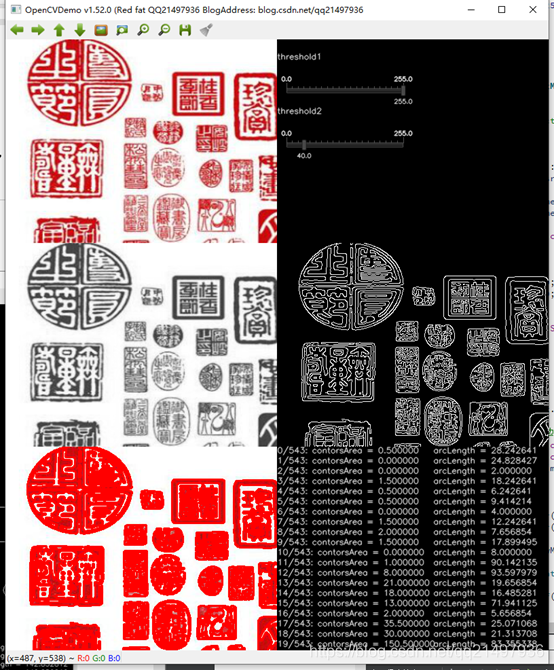
for(int index = 0; index < contours.size(); index++)
{
double area = cv::contourArea(contours[index]);
cvui::printf(windowMat,
srcMat.cols * 1,
srcMat.rows * 2 + 15 * index,
"%d/%d: contorsArea = %f",
index,
contours.size(),
area);
double length = cv::arcLength(contours[index], true);
cvui::printf(windowMat,
srcMat.cols * 1 + width / 2 + 30,
srcMat.rows * 2 + 15 * index,
"arcLength = %f",
length);
}
}
// 更新
cvui::update();
// 显示
cv::imshow(windowName, windowMat);
// esc键退出
if(cv::waitKey(25) == 27)
{
break;
}
}
}
对应版本号v1.52.0