《Real-time adaptive contrast enhancement for imaging sensors》论文解读及实现
前言
这个 ACE 算法是用来做图像对比度增强的算法。图像对比度增强的算法在很多场合都有用处,特别是在医学图像中,这是因为在众多疾病的诊断中,医学图像的视觉检查时很有必要的。医学图像由于本身及成像条件的限制,图像的对比度很低。因此,在这个方面已经开展了很多的研究。这种增强算法一般都遵循一定的视觉原则。众所周知,人眼对高频信号(边缘处等)比较敏感。虽然细节信息往往是高频信号,但是他们时常嵌入在大量的低频背景信号中,从而使得其视觉可见性降低。因此适当的提高高频部分能够提高视觉效果并有利于诊断。
算法原理
个人理解:
一张图片,总是由低频部分和高频部分构成的,低频部分可以由图像的低通滤波来得到,而高频部分可以由原图减去低频部分来得到。而本算法的目标是增强代表细节的高频部分,即是对高频部分乘上一个系数,然后重组得到增强的图像。所以本算法的核心就是高频部分增益系数(又叫 CG)的计算,第一种方法是将这个系数设为一个常数,第二种方法是将增益表示为与方差相关的量。假设图像中的某个点表示为
,那么以
为中心,窗口大小为
,其局部均值和局部方差为:
上面的式子中
就是所谓的局部标准差(LSD),定义
表示
对应的增强后的像素值.
ACE 算法可以表示为:
其中系数 就是上面说的 。一般情况下 总是大于 的,这样高频部分就可以得到增强。 的取值有 种,一种是直接取一个常数 ,这样上面的式子可以写成:
, 其中 是一个大于 的数。
这种情况下,图像中所有的高频部分都被同等放大,可能有些高频部分会出现过增强的现象的。
而第二种方法是对每个位置使用不同的增益,Lee 等人提出了下面的解决方案:
其中 是一个常数,这样 系数是空间自适应的,并且和局部均方差成反比,在图像的边缘或者其他变化剧烈的地方,局部均方差比较大,因此 的值就比较小,这样就不会产生振铃效应。然而,在平滑的区域,局部均方差就会很小,这样 的值比较大,从而引起了噪音的放大,所以需要对 的最大值做一定的限制才能获得更好的效果。
我们使用第二种方法,因为在图像的高频区域,局部方差较大,此时增益值就较小,这样就不会出现过亮的情况。但是在图像平滑的区域,局部均方差很小,此时增益值较大,从而可能会方法噪声信号,所以需要对增益最大值做一定的限制。 这个常数一些文章认为取图像的全局均值,而我这里参考 ImageShop 大牛的文章使用了全局均方差。下面给出一些代码实现和效果测试。
C++代码
//自适应对比度增强算法,C表示对高频的直接增益系数,n表示滤波半径,maxCG表示对CG做最大值限制
Mat ACE(Mat src, int C = 3, int n = 3, float MaxCG = 7.5){
int row = src.rows;
int col = src.cols;
Mat meanLocal; //图像局部均值
Mat varLocal; //图像局部方差
Mat meanGlobal; //全局均值
Mat varGlobal; //全局标准差
blur(src.clone(), meanLocal, Size(n, n));
Mat highFreq = src - meanLocal;
varLocal = highFreq.mul(highFreq);
varLocal.convertTo(varLocal, CV_32F);
for(int i = 0; i < row; i++){
for(int j = 0; j < col; j++){
varLocal.at<float>(i, j) = (float)sqrt(varLocal.at<float>(i, j));
}
}
meanStdDev(src, meanGlobal, varGlobal);
Mat gainArr = meanGlobal / varLocal; //增益系数矩阵
for(int i = 0; i < row; i++){
for(int j = 0; j < col; j++){
if(gainArr.at<float>(i, j) > MaxCG){
gainArr.at<float>(i, j) = MaxCG;
}
}
}
printf("%d %d\n", row, col);
gainArr.convertTo(gainArr, CV_8U);
gainArr = gainArr.mul(highFreq);
Mat dst1 = meanLocal + gainArr;
//Mat dst2 = meanLocal + C * highFreq;
return dst1;
}
int main(){
Mat src = imread("../test.png");
vector <Mat> now;
split(src, now);
int C = 150;
int n = 5;
float MaxCG = 3;
Mat dst1 = ACE(now[0], C, n, MaxCG);
Mat dst2 = ACE(now[1], C, n, MaxCG);
Mat dst3 = ACE(now[2], C, n, MaxCG);
now.clear();
Mat dst;
now.push_back(dst1);
now.push_back(dst2);
now.push_back(dst3);
cv::merge(now, dst);
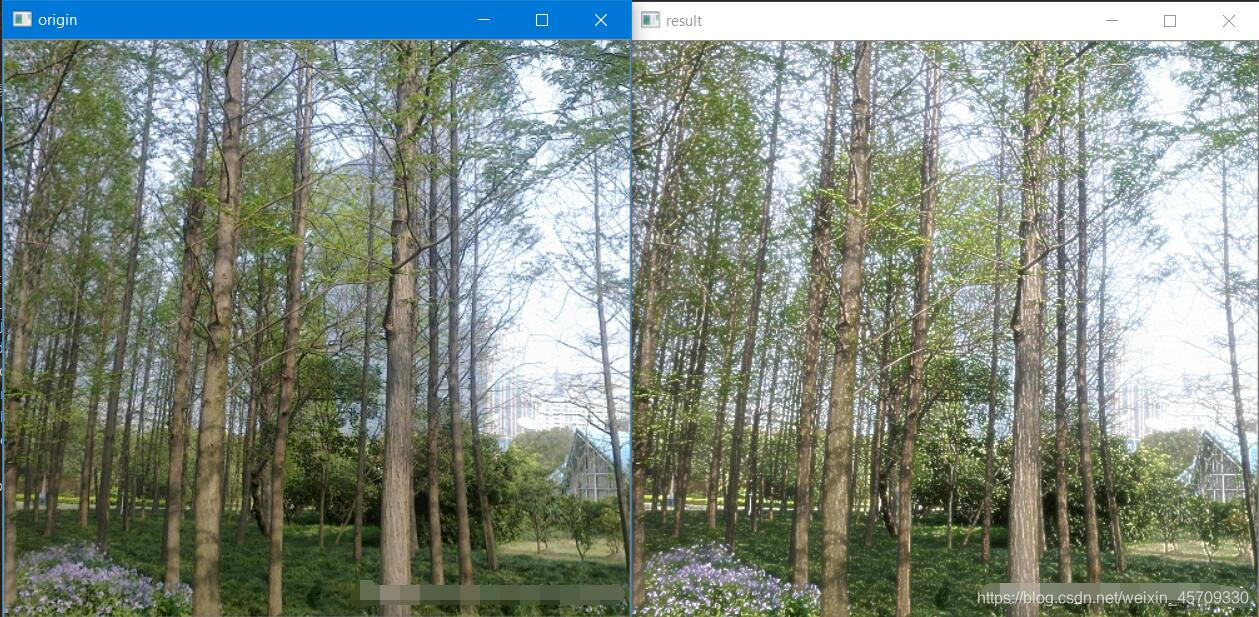
imshow("origin", src);
imshow("result", dst);
imwrite("../result.jpg", dst);
waitKey(0);
return 0;
}
效果:
代码解释
#include <iostream>
#include <opencv2/opencv.hpp>
using namespace cv;
using namespace std;
//高频=原图-低频 低频通过低通滤波得到
//低通滤波(Low-pass filter) 是一种过滤方式,规则为低频信号能正常通过,而超过设定临界值的高频信号则被阻隔、减弱。但是阻隔、减弱的幅度则会依据不同的频率以及不同的滤波程序(目的)而改变。
//自适应对比度增强算法,C表示对高频的直接增益系数,n表示滤波半径,maxCG表示对CG做最大值限制
Mat ACE(Mat src, int C = 3, int n = 3, float MaxCG = 7.5)
{
int row = src.rows;
int col = src.cols;
Mat meanLocal; //图像局部均值
Mat varLocal; //图像局部方差
Mat meanGlobal; //全局均值
Mat varGlobal; //全局标准差
//blur()函数可以用标准化的盒式过滤器来平滑图像。
//https://blog.csdn.net/duwangthefirst/article/details/79971322
//copyTo 也是深拷贝,但是否申请新的内存空间,取决于dst矩阵头中的大小信息是否与src一至,若一致则只深拷贝并不申请新的空间,否则先申请空间后再进行拷贝.
//clone 是完全的深拷贝,在内存中申请新的空间
//https://blog.csdn.net/u013806541/article/details/70154719?depth_1-utm_source=distribute.pc_relevant.none-task&utm_source=distribute.pc_relevant.none-task
blur(src.clone(), meanLocal, Size(n, n));
//求高频部分
Mat highFreq = src - meanLocal;
//dot为矩阵点乘,即对应元素相乘再相加(要求A、B行列式相同)
//mul是对应位的乘积,这里是highFreq每一个元素都平方
//https://blog.csdn.net/dcrmg/article/details/52404580
varLocal = highFreq.mul(highFreq);
//convertTo()矩阵数据类型转换:https://blog.csdn.net/iracer/article/details/49204147
varLocal.convertTo(varLocal, CV_32F);
for (int i = 0; i < row; i++)
{
for (int j = 0; j < col; j++)
{
//求标准差
varLocal.at<float>(i, j) = (float)sqrt(varLocal.at<float>(i, j));
}
}
//计算矩阵所有元素的均值和标准差。https://blog.csdn.net/hk121/article/details/83109994
meanStdDev(src, meanGlobal, varGlobal);
Mat gainArr = meanGlobal / varLocal; //增益系数矩阵
for (int i = 0; i < row; i++)
{
for (int j = 0; j < col; j++)
{
if (gainArr.at<float>(i, j) > MaxCG)
{
gainArr.at<float>(i, j) = MaxCG;
}
}
}
printf("%d %d\n", row, col);
gainArr.convertTo(gainArr, CV_8U);
gainArr = gainArr.mul(highFreq);
Mat dst1 = meanLocal + gainArr;
//Mat dst2 = meanLocal + C * highFreq;
//dst为目标图像
return dst1;
}
int main() {
Mat src = imread("test4.png");
vector <Mat> now;
split(src, now);
int C = 150;
int n = 5;
float MaxCG = 3;
Mat dst1 = ACE(now[0], C, n, MaxCG);
Mat dst2 = ACE(now[1], C, n, MaxCG);
Mat dst3 = ACE(now[2], C, n, MaxCG);
now.clear();
Mat dst;
now.push_back(dst1);
now.push_back(dst2);
now.push_back(dst3);
//该函数用来合并通道
merge(now, dst);
imshow("origin", src);
imshow("result", dst);
imwrite("../result.jpg", dst);
waitKey(0);
return 0;
}
