版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。
舵机SG90
舵机是一种位置(角度)伺服的驱动器,适用于需要角度不断变化并可以保持的控制系统。
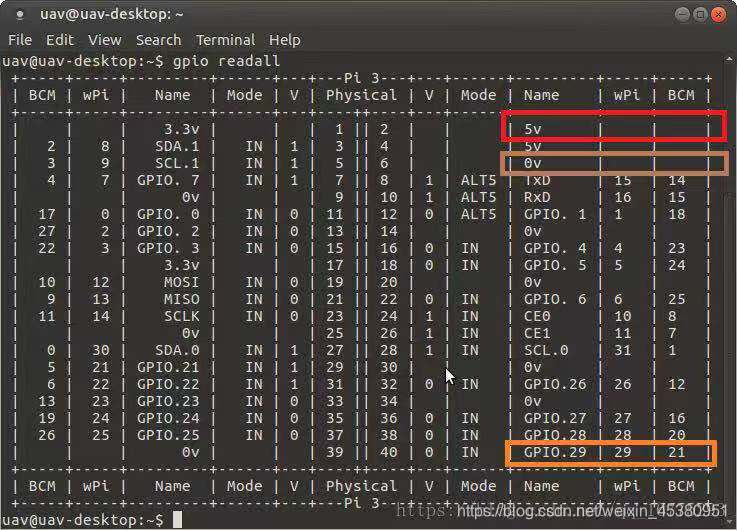
查看引脚命名图
pgio readall
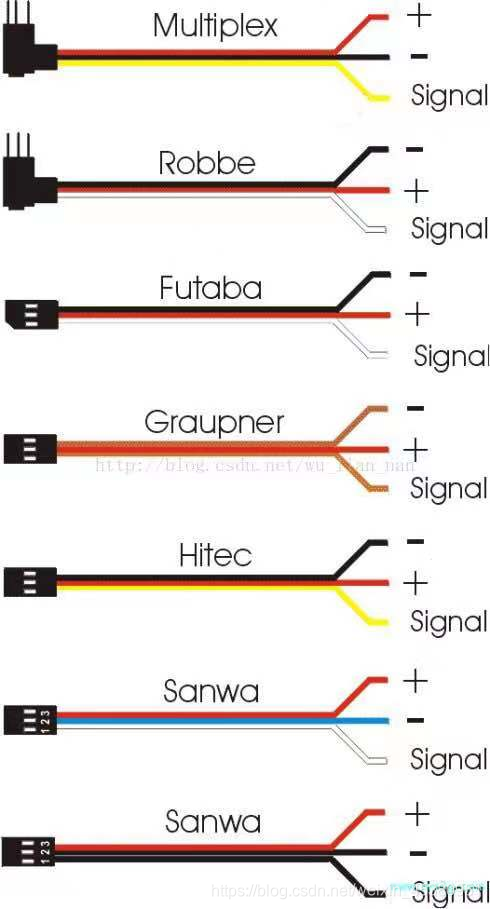
接线原则(一般选用5v的电源)
红+棕-黄信号
编写代码
#include<wiringPi.h>
#include<softPwm.h>
#define PWMPIN 29 //定义29管脚
void main(){
wiringPiSetup();
while(1){
softPwmCreate(PWMPIN,15,200); //起始位置
softPwmWrite(PWMPIN,25);
delay(1000);
softPwmWrite(PWMPIN,10);
delay(1000);
}
}