前文34.laser_filters的使用(2)讲述使用laser_filters中的LaserScanBoxFilter插件屏蔽车体干扰,本文讲述使用LaserScanAngularBoundsFilter插件屏蔽指定角度的数据
模拟数据
使用30.laser_filters的使用中的例子模拟得到一个
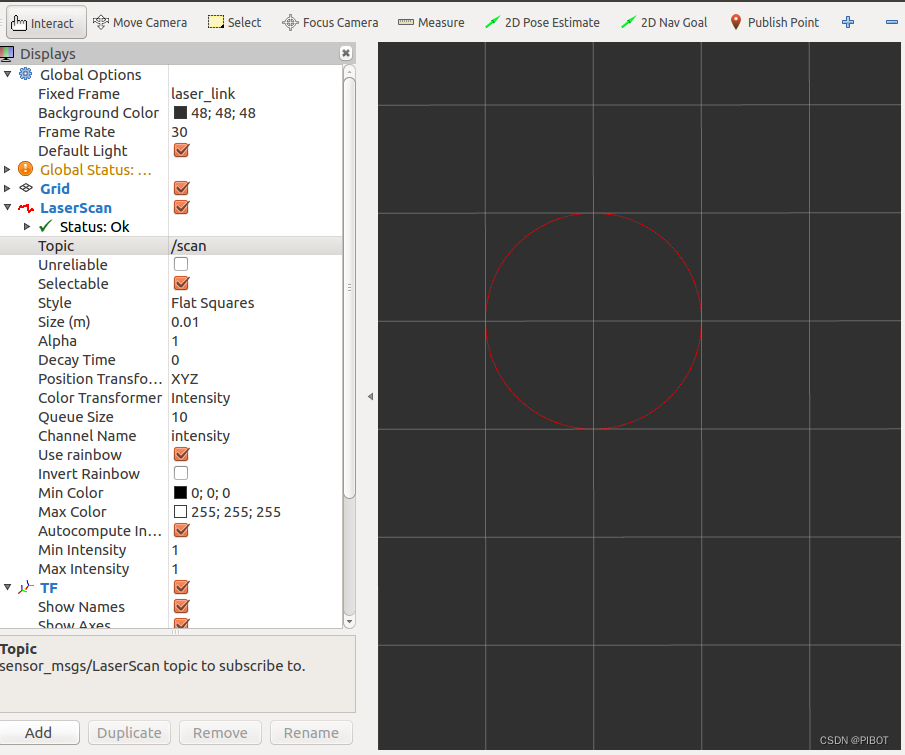
下面看下如何使用该包
angular_bounds_filter_example.launch
<launch>
<node pkg="laser_filters" type="scan_to_scan_filter_chain" output="screen" name="laser_filter">
<rosparam command="load" file="$(find pibot_bringup)/params/angular_bounds_filter.yaml" />
</node>
</launch>
angular_bounds_filter.yaml
scan_filter_chain:
- name: angle
type: laser_filters/LaserScanAngularBoundsFilter
params:
lower_angle: -0.7853981633974483
upper_angle: 3.9269908169872414
使用该配置,我们屏蔽225°(3.9269908169872414=π/180*225)到-45°(-0.7853981633974483=π/180*(-45))的数据
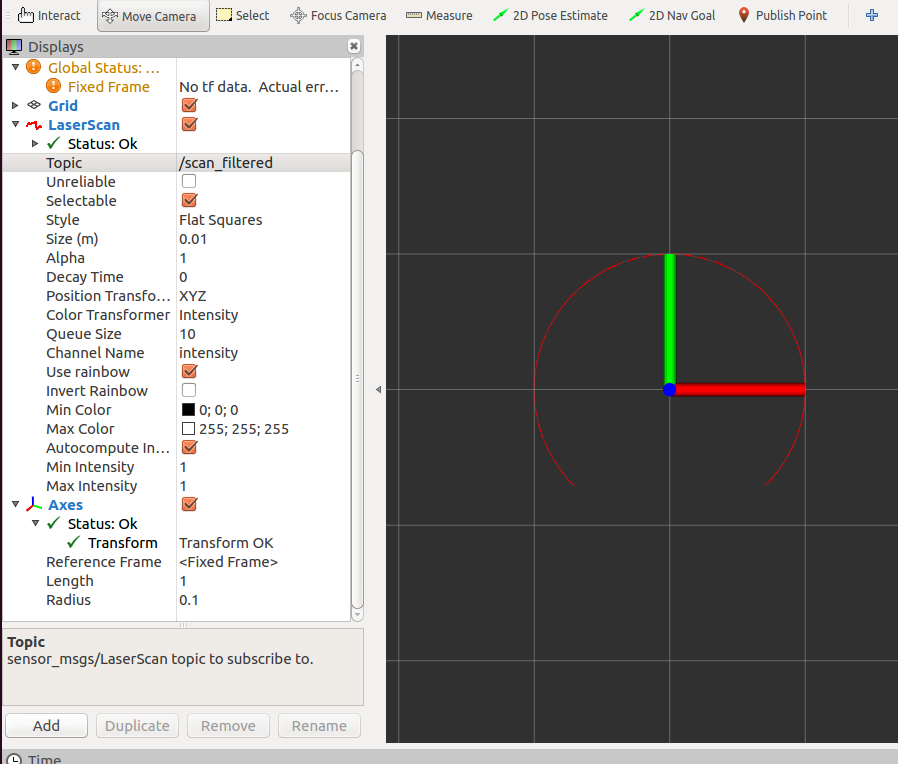
改用LaserScanAngularBoundsFilterInPlace我们可以得到一个相反的方向
scan_filter_chain:
- name: angle
type: laser_filters/LaserScanAngularBoundsFilterInPlace
params:
lower_angle: -0.7853981633974483
upper_angle: 3.9269908169872414
