1. Introdução
PID é a abreviatura em inglês de Proporcional (proporcional), Integral (integral) e Diferencial (diferencial). Como o nome sugere, o algoritmo de controle PID é um algoritmo de controle automático que combina links proporcionais, integrais e diferenciais. É o algoritmo de controle mais maduro e amplamente utilizado em sistemas contínuos. Este algoritmo de controle apareceu nas décadas de 1930 e 1940. É adequado para ocasiões em que o modelo do objeto controlado não é claro. A experiência operacional real e a análise teórica mostram que ao usar esta lei de controle para controlar muitos processos industriais, resultados satisfatórios podem ser obtidos. A essência do controle PID é realizar operações de acordo com a relação funcional de proporção, integral e diferencial de acordo com o valor de desvio do sinal de entrada, e os resultados da operação são usados para controlar a saída.
Com a introdução deste parágrafo, ainda é difícil para quem não estudou o algoritmo PID entender o que o algoritmo PID pode fazer? Que tipo de efeito de controle ele pode exercer? Alguns exemplos serão apresentados abaixo para explicar em detalhes o papel e o efeito de controle da compreensão do controle PID.Depois de compreender o PID, deduziremos o algoritmo PID em detalhes.
2. Controle de comutação
2.1. Breve descrição da quantidade de trocas
Agora temos uma tarefa que requer controlar um aquecedor para manter a temperatura de uma panela com água em 50graus. Você deve pensar que é simples. Quando a temperatura da água for inferior a 50 graus, basta ligar o aquecedor e deixá-lo aquecer a água. Se a temperatura da água for superior a 50 graus, desligue o aquecedor e pare de aquecer a água. Não é? isso não é suficiente? Sim, quando não há requisitos de alta precisão para a variável controlada (a variável controlada aqui é a temperatura da água), é de fato possível usar um interruptor como ligar ou desligar para controlar o objeto controlado.
2.2. Desvantagens da troca de quantidade
Mas e se o objeto de controle for um carro? Ao mesmo tempo, se eu quiser que a velocidade do carro permaneça em 50 km/h, ainda posso usar o controle do interruptor ? Para tais questões, podemos imaginar que se o computador de controle de cruzeiro do carro medir a velocidade do veículo em um determinado momento 45km/h. Por estar abaixo 50km/hda velocidade alvo, ele imediatamente pediu ao motor para acelerar. Como resultado, o motor recebeu um comando de aceleração total de 100% e o carro acelerou bruscamente 60km/h. Neste momento, como a velocidade é superior a , 50km/ho computador emite um comando para frear novamente! A experiência de condução obtida com esse método de controle é extremamente ruim. O resultado final de permitir que os passageiros utilizem tal sistema é, obviamente, passageiros irritados.
Portanto, na maioria das situações, é muito simples usar um valor de comutação para controlar uma quantidade física. Como o microcontrolador e o sensor não são infinitamente rápidos, o controle de aquisição requer tempo (quando o sensor detecta que a temperatura aumentou, a temperatura real já é muito maior que a temperatura alvo, e quando o sensor detecta que a temperatura diminuiu, a temperatura real a temperatura já está muito abaixo da temperatura alvo) Portanto, há um atraso de percepção. E o objeto controlado tem inércia. Por exemplo, se desligar um aquecedor, o seu calor residual (ou seja, a existência de inércia térmica) ainda fará com que a temperatura da água continue a subir durante um período de tempo, pelo que na maioria das vezes não consegue manter um estado estável.
2.3. Controle contínuo
Comparado com a escassez de quantidade de comutação, neste momento, é necessário um algoritmo que possa trazer rapidamente a quantidade física que precisa ser controlada para perto do valor alvo. Ao mesmo tempo, pode prever a tendência de mudança desta quantidade . Ele pode eliminar alguns fatores, como dissipação de calor e resistência. Erros estáticos causados por fatores como (por exemplo, a velocidade de aquecimento é igual à velocidade de resfriamento. Mesmo que haja uma diferença de temperatura, continuar a aquecer com potência constante não aumentará o temperatura). Como resultado, os matemáticos da época inventaram esse algoritmo duradouro, que é o algoritmo de controle PID.
3. Controle PID
3.1. Princípio de controle
O parâmetro PID é o seu nome, então como o nome sugere, o algoritmo PID possui três parâmetros, a saber P (proporcional), I (integral) e D (diferencial).Em aplicações práticas, esses três parâmetros são geralmente definidos como Kp ( proporcional).Ki (integral), Kd (diferencial). Estes três parâmetros correspondem a diferentes efeitos regulatórios. Nota: Embora o PID possua três parâmetros, ele nos permite utilizar apenas um deles, ou apenas dois deles, ou todos os três parâmetros podem ser utilizados ao mesmo tempo para formar um sistema de controle.
3.1.1 Ajuste proporcional Kp
p em Kp é proporção, ou seja, controle proporcional. O efeito de controle é o mais óbvio e o princípio é o mais simples. Por exemplo, a variável controlada aqui é a temperatura da água. Como variável controlada, a temperatura da água tem o valor da temperatura atual e o valor da temperatura alvo que esperamos.
Quando a diferença entre o valor da temperatura atual e o valor da temperatura alvo não for grande, deixe o aquecedor aquecer suavemente .
Se por algum motivo a temperatura cair muito, ligue o aquecedor com um pouco mais de força .
Se a temperatura atual for muito inferior à temperatura alvo, ligue o aquecedor na potência máxima para aproximar a temperatura da água da temperatura alvo o mais rápido possível.
Esta é a função de controle proporcional de P. Comparada com o método de controle de comutação, é obviamente mais elegante. Quanto maior for P, mais radical será o efeito de ajustamento, e quanto menor for P, mais conservador será o efeito de ajustamento. Com controle insuficiente do link P, o sistema não consegue atingir a estabilidade e a temperatura da água ainda fica em torno de 50 graus.
3.1.2 Ajuste diferencial Kd
d em Kd é diferencial, ou seja, controle diferencial. Como mencionado anteriormente, a estabilidade não pode ser alcançada utilizando apenas o sistema de controle proporcional e a temperatura ainda flutua. Isso é semelhante a um peso pendurado em uma mola. Quando a mola e o peso estiverem em uma posição equilibrada, puxe a mola com força e solte-a. Neste ponto ele irá vibrar. Como a resistência é muito pequena, ela pode continuar a oscilar por um longo período antes de recuperar a sua posição de equilíbrio.
Mas se a mola e o peso estiverem imersos em água, também quando a mola e o peso estiverem na posição de equilíbrio, puxe a mola com força e depois solte. Neste caso, leva pouco tempo para que a mola e o peso retornem à posição de equilíbrio devido à resistência da água.
Portanto, precisamos de um efeito de controle para fazer com que a velocidade de mudança da grandeza física controlada tenda a 0, o que é semelhante ao efeito de amortecimento da água na nascente mencionado acima. Porque quanto mais próximo do alvo, menor o efeito de controle de P. Quanto mais perto você chegar do alvo, mais suave será a ação de P. No entanto, existem muitos fatores internos ou externos que fazem com que o volume de controle oscile em uma pequena faixa.
Portanto, a função de D no PID é fazer com que a velocidade da grandeza física tenda a 0. Sempre que a grandeza controlada tremer, D exercerá força na direção oposta e tentará ao máximo frear a mudança (jitter). Quanto maior D, mais forte será a força de frenagem (amortecimento) na direção oposta.
Na verdade, com controle proporcional e diferencial, todo o sistema pode ser estável. Neste caso, por que é necessário o controle integral? Deixe-me continuar com esta questão.
3.1.3 Ajuste integral de Ki
i em Ki é integral, ou seja, controle integral. Como mencionado anteriormente, com controle proporcional e diferencial, todo o sistema pode ficar estável. Agora, se o aquecedor que utiliza apenas controle proporcional e diferencial for levado a um local muito frio para ferver água, a água precisa ser fervida a 50 graus . Ok, agora,
sob a ação do controle da proporção P, a temperatura da água aumentará lentamente. Só quando a temperatura da água subiu para 45 graus é que um problema foi descoberto. A temperatura da água não podia subir mais e permaneceu em 45 graus. Por que isso acontece? Agora vamos analisar esse problema juntos e os resultados são os seguintes.
Como a temperatura da água chegou a 45 graus, o irmão P pensa assim: estou muito perto da meta, só preciso aquecê-la um pouco. Mas o tempo está muito frio e a velocidade de dissipação da água é igual à velocidade do aquecimento suave controlada por P. Nesse momento, o irmão D pensava assim: o aquecimento e a dissipação de calor são iguais, a temperatura não oscila e parece que não preciso me ajustar. Como resultado, a temperatura da água permanece em 45 graus para sempre e não pode continuar a subir até 50 graus.
De acordo com o bom senso, todos sabemos que para a mesma taxa de aquecimento e taxa de dissipação de calor ( este é o erro de estado estacionário, o erro de estado estacionário ocorre quando o sistema transita de um estado estacionário para um novo estado estacionário, ou quando o o sistema é perturbado e reequilibrado (desvio ), mas para continuar a aumentar a temperatura, a potência de aquecimento deve ser aumentada ainda mais ( eliminando o erro de estado estacionário ). Mas isso encontrará outro problema: quanta potência deve ser aumentada?
Os cientistas já pensaram neste problema e estabeleceram um valor integral. Enquanto existir o desvio, o desvio será continuamente integrado (acumulado) e reflectido na intensidade de ajustamento.
Desta forma, mesmo que não haja muita diferença entre 45 graus e 50 graus, o tempo mudará com o passar do tempo. Enquanto a temperatura alvo não for atingida, a integral continuará a aumentar. Neste momento, o sistema de controle perceberá lentamente que a temperatura alvo não foi atingida e é hora de aumentar a potência.
Depois de atingir a temperatura alvo, assumindo que a temperatura não flutua, o valor integrado não mudará (porque a integração de 0 continua, o resultado ainda será 0). Neste momento, a potência de aquecimento ainda é igual à potência de resfriamento, mas a temperatura está constante em 50 graus.
Quanto maior o valor I, maior será o coeficiente multiplicado durante a integração e mais óbvio será o efeito da integração. Portanto, o papel de I é reduzir o erro sob condições estáticas e tornar a quantidade física controlada o mais próximo possível do valor alvo definido. Preciso prestar atenção em uma questão ao utilizá-lo: o limite de pontos precisa ser definido. Porque quando o aquecimento é iniciado, a temperatura atual deve ser bem diferente do nosso valor de temperatura definido. Se o limite integral não for definido, a integral será muito grande e, em última análise, o sistema será difícil de controlar.
3.2 Curva de resposta ao degrau do PID
Os métodos e princípios de trabalho dos três tipos de ajustes PID já foram explicados antes. Agora vamos observar os efeitos da resposta de ajuste dos três tipos de ajustes.
4. Cenários de aplicação
A partir da introdução acima, podemos saber que o PID pode desempenhar seu papel em situações em que uma grandeza física controlada precisa ser controlada de forma estável, como manutenção do equilíbrio, estabilização da temperatura, estabilização da velocidade, etc. As aplicações típicas incluem controle de atitude de foguetes, controle de mira de artilharia naval, controle de cruzeiro de carros, controle de velocidade de motor, direção de veículos autônomos, controle de voo flutuante de drones, estabilizadores de câmera, gimbals de câmera e líquidos na indústria. Controle de bits e assim por diante.
5. Derivação da fórmula PID
Antes disso, analisamos detalhadamente o princípio do controle PID e temos uma certa compreensão da teoria do controle PID, então vamos analisar especificamente a derivação e discretização das expressões matemáticas PID.
5.1 Definição do sistema de controle
No sistema de controle, o desvio de controle e refere-se ao resultado da comparação do valor definido w com o valor real de saída y, ou seja,
e = w - você = wye=c-sim
O chamado regulador PID é um tipo de regulador que forma a grandeza de controle de acordo com a combinação linear das operações de proporção (P), integral (I) e diferencial (D) do desvio e, conforme mostrado na figura abaixo .
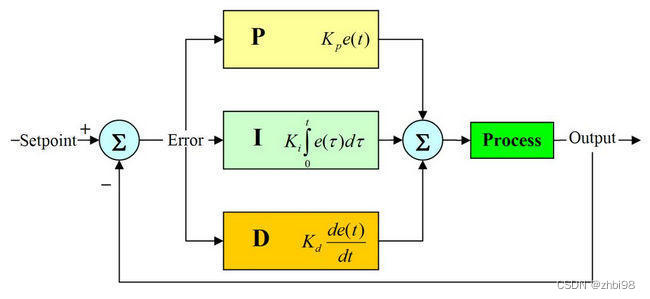
Conforme mencionado anteriormente, em aplicações práticas, a estrutura do regulador PID pode ser alterada de forma flexível de acordo com as características e requisitos de controle do objeto controlado, e alguns dos links são utilizados para formar a lei de controle para formar vários controladores. Por exemplo, um regulador proporcional (P), um regulador integral proporcional (PI) ou um regulador derivativo proporcional (PD).
5.2 Análise de vários tipos de reguladores
5.2.1 Regulador proporcional
A lei de controle do regulador proporcional é
você = K e + você 0 u=Ke+u_{0}você=Quando+você0
KK na expressãoK é o coeficiente de proporção (ou seja, Kp na figura),u 0 u0u 0 é o benchmark da grandeza de controle, ou seja,e = 0 e=0e=Função de controle em 0 (como abertura inicial da válvula, sinal elétrico de referência, etc.). As vantagens do controle proporcional são que ele é simples (é o regulador mais simples), mas é rápido e pode ajustar o desvioeee dá uma resposta imediata. Uma vez ocorrido o desvio, o regulador toma medidas imediatas para fazer com que a quantidade controlada mude no sentido de reduzir o desvio.
O efeito de controle do regulador proporcional depende do coeficiente proporcionalKKK。KK __Quanto maior for K , mais forte será o efeito do regulador, o que é benéfico para reduzir a diferença estática do sistema. Para objetos de controle com propriedades de autoequilíbrio, é difícil para o regulador proporcional eliminar o erro estático do sistema. Além disso, o coeficiente proporcionalKKK não pode ser aumentado infinitamente. QuandoKkQuando o valor K é muito grande, o desempenho dinâmico do sistema irá deteriorar-se, causando oscilação do sistema de controle e, em casos graves, o sistema ficará fora de controle.
5.2.2 Regulador integral proporcional
Com base no regulador proporcional, um link integral é adicionado para formar um regulador integral proporcional (PI) cuja lei de controle é:
você = K ( e + 1 T i ∫ 0 tedt ) + você 0 você=K(e+\frac{1}{T_{i}}\int_0^te dt)+u_{0}você=K ( e+Teu1∫0te dt ) _+você0
Na expressão T i T_{i}Teué chamado de tempo de integração, subscrito iii significa integral. O link integral no regulador PI tem um efeito cumulativo no desvio. Contanto que o desvioeeSe e não for zero, afetará a quantidade de controle através do efeito cumulativo e reduzirá o desvio. Até que o desvio chegue a zero, o efeito de controle não mudará mais e o sistema atingirá um estado estacionário. Portanto, a adição do link integral ajuda a eliminar o erro estático do sistema.
Tempo de integraçãoT i T_{i}TeuQuanto menor for, mais forte será o vínculo de integração. Tempo de integração T i T_{i}TeuQuanto maior for, mais fraco será o elo de integração. Isto é benéfico para reduzir o overshoot do sistema e melhorar a estabilidade do sistema, mas o processo de eliminação do erro estático do sistema será mais lento.
Tempo de integração T i T_{i}TeuA seleção pode ser baseada nas características do objeto controlado. Para objetos controlados, como pressão da tubulação e vazão com pouca histerese, um tempo de integração menor T i T_{i} pode ser selecionado.Teu, para objetos com forte histerese, como temperatura, a área opcional é maior T i T_{i}Teu。
5.2.3 Regulador proporcional-integral-derivativo
Ao adicionar um link diferencial com base no regulador integral proporcional, um regulador diferencial integral proporcional (PID) é formado. A lei de controle é:
você = K ( e + 1 T i ∫ 0 tedt + T ddedt ) + você 0 u=K(e+\frac{1}{T_{i}}\int_0^te dt+T_{d}\frac{de} {dt})+u_{0}você=K ( e+Teu1∫0te - t+Tddt _de e)+você0
T d T_{d} na expressãoTdé chamado de tempo diferencial, subscrito ddd refere-se ao diferencial, e a saída do link diferencial adicionado é
você = K ( 0 + 0 + T ddedt ) + 0 você=K(0+0+T_{d}\frac{de}{dt})+0você=K ( 0+0+Tddt _de e)+0
ou seja, ud = KT ddedt, ou seja, u_{d}=KT_{d}\frac{de}{dt}Imediatamente _d=KT _ddt _de e
O link diferencial pode responder prontamente a quaisquer alterações no desvio e produzir um efeito de controle para ajustar a saída do sistema e evitar alterações no desvio. Quanto mais rápido o desvio muda, a saída do link diferencial ud u_{d}vocêdQuanto maior o valor, maior será a quantidade de correção de feedback.
O efeito diferencial ajuda a reduzir o overshoot do sistema, superar a oscilação do sistema e estabilizar o sistema. O link diferencial acelera a ação do sistema e reduz o tempo de ajuste, melhorando assim o desempenho dinâmico do sistema.
6. Digitalização do algoritmo PID
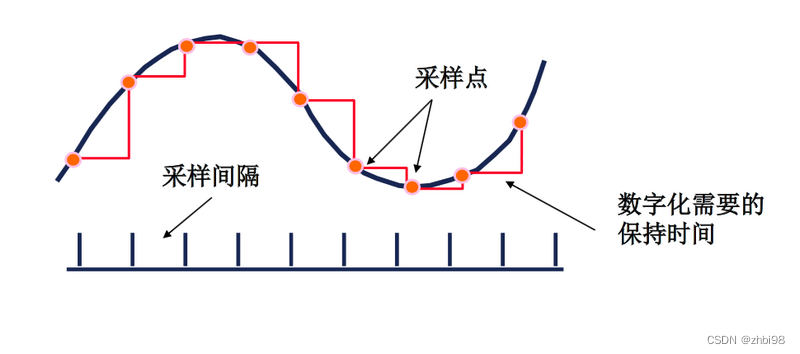
O sistema de controle digital por computador é essencialmente um sistema de controle de amostragem, que só pode calcular medições com base no valor do desvio no momento da amostragem. Portanto, precisamos discretizar a fórmula do regulador diferencial integral proporcional e substituir a equação diferencial do sistema contínuo por uma equação de diferença digital.
Este exemplo típico é o osciloscópio digital amplamente utilizado atualmente. Para um osciloscópio digital, ele não pode quantificar diretamente sinais analógicos. Portanto, se você precisar quantificar um sinal analógico, como uma onda senoidal, como um osciloscópio digital faz isso? O osciloscópio digital pode coletar um valor de tensão no sinal de onda senoidal em um determinado momento através do conversor analógico-digital (ADC).Então, quando a amostragem continua em um determinado momento e em uma determinada taxa, uma série de pontos de amostragem pode ser obtido. Esses pontos de amostragem Ou seja, um conjunto de valores de tensão que constituem um sinal de onda senoidal. Converta esses valores de tensão em coordenadas de tela e conecte essas coordenadas usando segmentos de linha para obter uma imagem próxima ao sinal de onda senoidal Portanto, quanto maior a taxa de amostragem (a taxa de amostragem tende a (perto do infinito), mais próxima a imagem obtida estará da verdadeira continuidade. Esta é a ideia de limite e diferencial em matemática .
6.1 Digitalização
No sistema de controle, assume-se que o computador toda vez que Δt ΔtΔt coleta o sinal de controle uma vez e envia o sinal de controle uma vez para o atuador do objeto controlado, Δt ΔtΔtGeralmente usamosTT _T representa, denominado período de amostragem.
Suponha que no momento da amostragemt = i ⋅ Δ t = i ⋅ T ( i é o número de amostragem, i = 0 , 1 , 2 , 3 , . . . , n ) t=i·Δt=i·T (i é o número de amostragem, i=0,1,2,3,...,n)t=eu ⋅Δ t=eu ⋅T ( i é o número de sequência de amostragem ,eu=0 ,1 ,2 ,3 ,... ,n ) , aqui o número de amostragemiii é o número de amostragem, período de amostragemTTT é o tempo que cada amostragem dura (leva), entãot = i ⋅ Δ t = i ⋅ T t=i·Δt=i·Tt=eu ⋅Δ t=eu ⋅T é somar o tempo de cada amostra para obter a duração total desde o início até o presente, o que é semelhante ao tempo de integração.
O valor do desvio ée (i T ) e (iT)e ( i T ),简记为e (i) e(i)e ( i )或não nãoe i , refere-se ao valor do desvio do tempo atual (número de sequência de amostragem x período = tempo atual).
A quantidade de controle évocê (i T) você (iT)você ( i T )简记为u (i) você(i)você ( eu ) oruiuivocê eu , isto é, obtemos o seguinte
ei = e (i) = e (i T), ui = u (i) = u (i T) e_{i} = e(i)=e(iT), u_{i} = u(i)= você (eu)eeu=e ( eu )=e ( eu T ) ,vocêeu=você ( eu )=você ( eu ) _
Quando o período de amostragem TTQuando T é pequeno o suficiente, métodos de cálculo numérico podem ser usados para aproximar infinitamente os termos integrais e diferenciais do PID, e a seguinte aproximação pode ser obtida
Parte de pontos
∫ 0 tedt ≈ ∑ j = 0 ou seja ( j ) ⋅ Δ t \int_0^te dt \approx \sum_{j=0}^ie(j) · Δt∫0te - t≈j = 0∑eue ( j ) ⋅Δ t
即 ≈ ∑ j = 0 ou seja ( j ) ⋅ T 即 \approx \sum_{j=0}^ie(j) · TAgora mesmo≈j = 0∑eue ( j ) ⋅T
即 ≈ T ⋅ ∑ j = 0 ou seja ( j ) 即 \approx T·\sum_{j=0}^ie(j)Agora mesmo≈T⋅ _j = 0∑eue ( j )
即 ≈ T ⋅ ∑ j = 0 ou seja, 即 \approx T·\sum_{j=0}^i e_{j}Agora mesmo≈T⋅ _j = 0∑euej
Parte diferencial
de ( t ) dt ≈ Δ e Δ t \frac{de(t)}{dt} \approx \frac{Δe}{Δt}dt _d e ( t )≈Δ tΔe_ _
即 ≈ e ( i ) − e ( i − 1 ) Δ t 即 \approx \frac{e(i)-e(i-1)}{Δt}Agora mesmo≈Δ te ( eu )-e ( eu-1 )
即 ≈ e ( i ) − e ( i − 1 ) T 即 \approx \frac{e(i)-e(i-1)}{T}Agora mesmo≈Te ( eu )-e ( eu-1 )
即 ≈ ei − ei − 1 T 即 \approx \frac{e_{i}-e_{i-1}}{T}Agora mesmo≈Teeu-eeu − 1
Então quando o período de amostragem TTQuando T é pequeno o suficiente, o processo controlado está muito próximo do processo de controle contínuo, situação chamada de controle quase.
6.2 PID posicional
Agora substituímos as expressões das partes integrais e diferenciais que foram digitalizadas no ponto anterior na expressão abaixo, substituindo as partes integrais e diferenciais da expressão abaixo
você = K ( e + 1 T i ∫ 0 tedt + T ddedt ) + você 0 u=K(e+\frac{1}{T_{i}}\int_0^te dt+T_{d}\frac{de} {dt})+u_{0}você=K ( e+Teu1∫0te - t+Tddt _de e)+você0
Primeiro substitua a expressão da parte integral da seguinte forma
ui = K ( ei + 1 T i ⋅ T ⋅ ∑ j = 0 iej + T ddedt ) + u 0 u_{i}=K(e_{i}+\frac{1}{T_{i}}·T· \sum_{j=0}^i e_{j}+T_{d}\frac{de}{dt})+u_{0}vocêeu=K ( eeu+Teu1⋅T⋅ _j = 0∑euej+Tddt _de e)+você0
Em seguida, substitua a expressão na parte diferencial da seguinte forma
ui = K ( ei + 1 T i ⋅ T ⋅ ∑ j = 0 iej + T d ⋅ ei − ei − 1 T ) + u 0 u_{i}=K(e_{i}+\frac{1}{T_ {i}}·T·\sum_{j=0}^i e_{j}+T_{d}·\frac{e_{i}-e_{i-1}}{T})+u_{0}vocêeu=K ( eeu+Teu1⋅T⋅ _j = 0∑euej+Td⋅Teeu-eeu − 1)+você0
Finalmente, resolva isso e obtenha
ui = K [ ei + TT i ⋅ ∑ j = 0 iej + T d T ⋅ ( ei − ei − 1 ) ] + u 0 u_{i}=K[e_{i}+\frac{T}{T_{ i}}·\sum_{j=0}^i e_{j}+\frac{T_{d}}{T}·(e_{i}-e_{i-1})]+u_{0}vocêeu=K [ eeu+TeuT⋅j = 0∑euej+TTd⋅( eeu-eeu − 1)]+você0
Como o valor de saída da expressão ui u_{i}vocêeuCorresponde individualmente à posição do atuador (como a abertura da válvula), portanto, essa fórmula é geralmente chamada de fórmula de controle PID de posição digital.
No sistema de controle, se o atuador utilizar válvula reguladora, a grandeza de controle corresponde à abertura da válvula, que representa a posição do atuador.Neste momento, o controlador deve utilizar um algoritmo de controle PID de posição digital.
6.3 PID Incremental
O que é PID incremental? Da derivação anterior, sabemos que o controlador PID posicional pode produzir um tamanho específico de quantidade de controle para controlar o ângulo de abertura e fechamento da válvula.Por exemplo, a saída de 30 graus controla a válvula para abrir 30 graus, e a saída de 0 graus controla o fechamento da válvula. Essa quantidade de controle é chamada de controle absoluto. O conceito oposto ao volume de controle absoluto é o volume de controle relativo. O chamado volume de controle relativo significa que o valor de controle emitido pelo PID é um valor relativo. Por exemplo, a saída de 30 graus controla a válvula para abrir 30 graus, e o a saída de -30 graus controla o fechamento da válvula, portanto o valor relativo é a quantidade de alteração em relação ao valor anterior. Com base na ideia de valores relativos, o PID incremental pode ser derivado do PID posicional.
De acordo com a derivação do PID posicional anterior, pode-se ver que ui u_{i}vocêeué (nota T i T_{i}Teusubscrito iii refere-se à integral, não ao índice de amostragem)
ui = K [ ei + TT i ⋅ ∑ j = 0 iej + T d T ⋅ ( ei − ei − 1 ) ] + u 0 u_{i}=K[e_{i}+\frac{T}{T_{ i}}·\sum_{j=0}^i e_{j}+\frac{T_{d}}{T}·(e_{i}-e_{i-1})]+u_{0}vocêeu=K [ eeu+TeuT⋅j = 0∑euej+TTd⋅( eeu-eeu − 1)]+você0
Raiz da interface do usuário você_{i}vocêeuKachiui − 1 você_{i-1}vocêeu − 1é (nota T i T_{i}Teusubscrito iii refere-se à integral, não ao índice de amostragem, e não participa da operação)
ui − 1 = K [ ei − 1 + TT i ⋅ ∑ j = 0 i − 1 ej + T d T ⋅ ( ei − 1 − ei − 2 ) ] + u 0 u_{i-1}=K[e_{ i-1}+\frac{T}{T_{i}}·\sum_{j=0}^{i-1} e_{j}+\frac{T_{d}}{T}·(e_{ i-1}-e_{i-2})]+u_{0}vocêeu − 1=K [ eeu − 1+TeuT⋅j = 0∑eu − 1ej+TTd⋅( eeu − 1-eeu − 2)]+você0
Estilo Shojo ui u_{i}vocêeusoma ui − 1 você_{i-1}vocêeu − 1Substitua a expressão abaixo
Δ ui = ui − ui − 1 Δu_{i}=u_{i}-u_{i-1}Você _eu=vocêeu-vocêeu − 1
Disponível
Δ ui = K [ ei + TT i ⋅ ∑ j = 0 iej + T d T ⋅ ( ei − ei − 1 ) ] + u 0 − K [ ei − 1 + TT i ⋅ ∑ j = 0 i − 1 ej + T d T ⋅ ( ei − 1 − ei − 2 ) ] + u 0 Δu_{i}=K[e_{i}+\frac{T}{T_{i}}·\sum_{j=0}^i e_{j}+\frac{T_{d}}{T}·(e_{i}-e_{i-1})]+u_{0} - K[e_{i-1}+\frac{T }{T_{i}}·\sum_{j=0}^{i-1} e_{j}+\frac{T_{d}}{T}·(e_{i-1}-e_{i- 2})]+você_{0}Você _eu=K [ eeu+TeuT⋅j = 0∑euej+TTd⋅( eeu-eeu − 1)]+você0-K [ eeu − 1+TeuT⋅j = 0∑eu − 1ej+TTd⋅( eeu − 1-eeu − 2)]+você0
A parte do somatório é subtraída e o restante TT iei \frac{T}{T_{i}}e_{i}TeuTeeu
Δ ui = K [ ei − ei − 1 + TT iei + T d T ( ei − 2 ei − 1 + ei − 2 ) ] Δu_{i}=K[e_{i}-e_{i-1}+\ frac{T}{T_{i}}e_{i}+\frac{T_{d}}{T}(e_{i}-2e_{i-1}+e_{i-2})]Você _eu=K [ eeu-eeu − 1+TeuTeeu+TTd( eeu-2e _eu − 1+eeu − 2)]
Será que KKExpanda K para cada termo, obtemos
Δ ui = K ei − K ei − 1 + KTT iei + KT d T ( ei − 2 ei − 1 + ei − 2 ) Δu_{i}=Ke_{i}-Ke_{i-1}+K\frac{ T}{T_{i}}e_{i}+K\frac{T_{d}}{T}(e_{i}-2e_{i-1}+e_{i-2})Você _eu=K eeu-K eeu − 1+KTeuTeeu+KTTd( eeu-2e _eu − 1+eeu − 2)
Expandir novamente
Δ ui = K ei - K ei - 1 + KTT iei + KT d T ei - 2 KT d T ei - 1 + KT d T ei - 2 Δu_{i}=Ke_{i}-Ke_{i-1}+ K\frac{T}{T_{i}}e_{i}+K\frac{T_{d}}{T}e_{i}-2K\frac{T_{d}}{T}e_{i- 1}+K\frac{T_{d}}{T}e_{i-2}Você _eu=K eeu-K eeu − 1+KTeuTeeu+KTTdeeu-2K _TTdeeu − 1+KTTdeeu − 2
Mesclar itens semelhantes novamente
Δ ui = ( K + KTT i + KT d T ) ei + ( − K − 2 KT d T ) ei − 1 + ( KT d T ) ei − 2 Δu_{i}=(K+K\frac{T} {T_{i}}+K\frac{T_{d}}{T})e_{i}+(-K-2K\frac{T_{d}}{T})e_{i-1}+( K\frac{T_{d}}{T})e_{i-2}Você _eu=( K+KTeuT+KTTd) eeu+( - K-2K _TTd) eeu − 1+( KTTd) eeu − 2
Será que KKK é colocado fora da expressão e obtemos
Δ ui = K ( 1 + TT i + T d T ) ei + K ( − 1 − 2 T d T ) ei − 1 + K ( T d T ) ei − 2 Δu_{i}=K(1+\frac {T}{T_{i}}+\frac{T_{d}}{T})e_{i}+K(-1-2\frac{T_{d}}{T})e_{i-1 }+K(\frac{T_{d}}{T})e_{i-2}Você _eu=K ( 1+TeuT+TTd) eeu+K ( -1 _-2TTd) eeu − 1+K (TTd) eeu − 2
Peça novamente
d 0 = K ( 1 + TT i + T d T ) , d 1 = − K ( 1 + 2 T d T ) , d 2 = K ( T d T ) d_{0}=K(1+\frac{ T}{T_{i}}+\frac{T_{d}}{T}), d_{1}=-K(1+2\frac{T_{d}}{T}), d_{2} =K(\frac{T_{d}}{T})d0=K ( 1+TeuT+TTd) ,d1=− K ( 1+2TTd) ,d2=K (TTd)
Então use d 0 , d 1 , d 2 d_{0},d_{1},d_{2}d0,d1,d2将Δ ui Δ_{i}Você _eusimplificado para
Δ ui = d 0 ei + d 1 ei − 1 + d 2 ei − 2 Δu_{i}=d_{0}e_{i}+d_{1}e_{i-1}+d_{2}e_{i -2}Você _eu=d0eeu+d1eeu − 1+d2eeu − 2
O algoritmo incremental só precisa manter os valores de desvio dos três momentos anteriores ao momento atual. O algoritmo PID incremental tem certas vantagens em comparação com o algoritmo PID posicional.O cálculo de cada saída do algoritmo posicional utiliza o valor acumulado dos desvios anteriores.
∑ j = 0 ou seja, \sum_{j=0}^i e_{j}j = 0∑euej
É fácil produzir grandes erros acumulados, enquanto o algoritmo incremental só precisa calcular o incremento.Quando há erro de cálculo ou precisão insuficiente, terá menos impacto no cálculo da quantidade de controle.
7. Resumo
Através do processo de derivação anterior, temos uma compreensão detalhada da derivação e discretização do PID, mas aqui ainda precisamos pensar em duas questões.
Questão 1 : Por que o tempo de integração T i T_{i} está na fórmula do algoritmo PID?Teue tempo diferencial T d T_{d}TdUm no denominador e outro no numerador?
Há principalmente uma consideração dimensional .
A parte integral é o ganho proporcional multiplicado pelo erro, depois multiplicado pela unidade de tempo dividida pela constante de tempo de integração, portanto a constante de tempo de integração T i T_{i}TeuColoque o denominador e a unidade de tempo pela qual a integral precisa ser multiplicada para cancelar, de modo que a dimensão da subintegral ainda seja o ganho proporcional vezes o erro. (Por exemplo, para velocidade vvv vezes tempottt pega a distânciasss , a dimensão neste momento muda de velocidade para distância. Neste momento, o tempo de integraçãoT i T_{i}Teucolocado no denominador, terminará com o tempo ttt se anula e a dimensão final ainda é a velocidade. )
O mesmo vale para a parte diferencial: multiplique o ganho proporcional pelo erro, depois multiplique pela constante de tempo diferencial, divida pela unidade de tempo, coloque o tempo diferencial T no numerador e compense-o pela unidade de tempo pela qual o diferencial precisa ser dividido.A dimensão do diferencial ainda é o ganho proporcional dividido pelo erro.
Quanto ao ganho proporcional K p K_{p}KpA dimensão é determinada pela relação física e modelo matemático entre erro e saída.
Questão 2 : Por que na derivação da discretização da parte integral do PID, o erro e ( j ) e(j)e ( j ) também precisa ser multiplicado pelo período de amostragemΔ t ΔtΔt é acumulado novamente?
Isso ocorre porque a essência da integral é calcular a área e dividir com precisão a área completa de uma forma irregular em vários comprimentos ( yyvalor do eixo y ) for diferente, a largura (tempo de amostragemΔt ΔtΔt ) o mesmo retângulo, e então acumular as áreas desses retângulos para finalmente obter a área completa da forma irregular, como a velocidade instantânea vvv versus tempottt é integrado e a distânciasss , o tamanho da área após a integração corresponde à distância do percurso, conforme mostrado na figura abaixo.

Então, para cometer o erro e ( j ) e(j)O efeito cumulativo de e ( j ) aproximando-se da integral deve ser multiplicado porΔ t ΔtΔt。 _
Pergunta 3 : TT na expressão de derivação de discretização PIDT和T i T_{i}Teu, T d T_{d}TdA diferença?
Ambos são usados para descrever o tempo, mas são completamente diferentes, TTT representa o tempo de amostragemΔt ΔtΔ t,而T i T_{i}Teu, T d T_{d}TdÉ uma constante a ser determinada, que serve para ajustar a estabilidade do sistema para que o sistema possa ser ajustado de acordo com diferentes cenários de aplicação.