Controle PID difuso
Este artigo consiste principalmente em três partes: o princípio do controlador PID fuzzy, a implementação e teste do controlador PID fuzzy em C++.
1. Princípio do PID difuso
O processo de controle PID fuzzy é mostrado na figura abaixo. O erro e entre o valor alvo Xtarget e o valor de saída Xout e a taxa de mudança de/dt de e são usados como entrada do controlador fuzzy. O controlador fuzzy primeiro executa fuzzy processamento na entrada e, em seguida, executa o raciocínio difuso e, finalmente, defuzzifica o resultado do raciocínio difuso para produzir os três parâmetros kp, ki, kd do controlador PID , de modo a obter o efeito de ajuste adaptativo dos parâmetros do controlador PID.
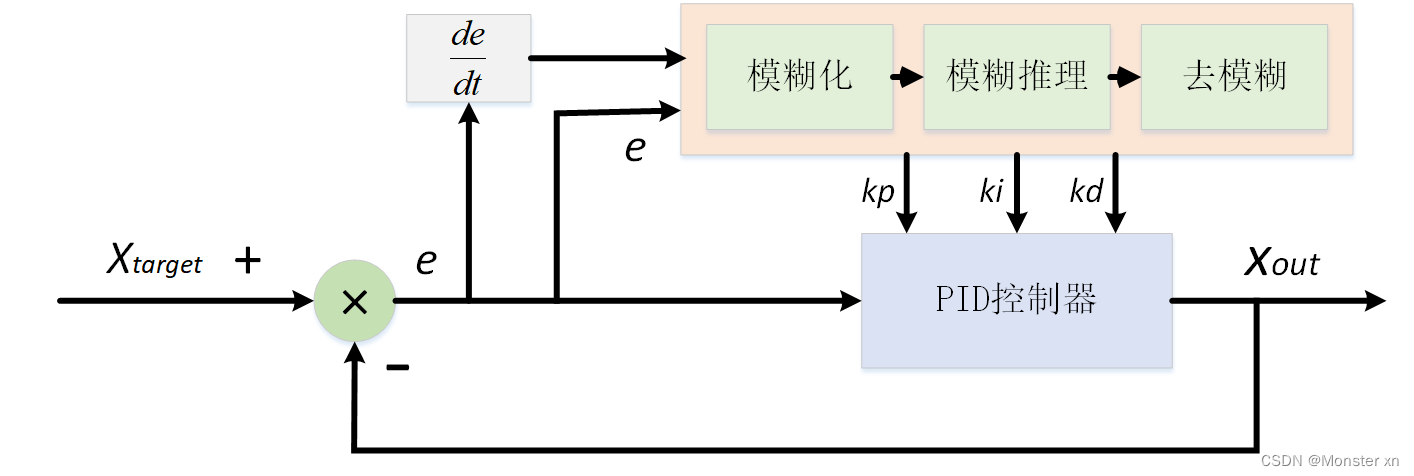
De acordo com a descrição acima, o controlador fuzzy é composto principalmente de três partes: defuzzificação, raciocínio fuzzy e defuzzificação . As três partes serão explicadas em detalhes a seguir.
1.1 Fuzzificação
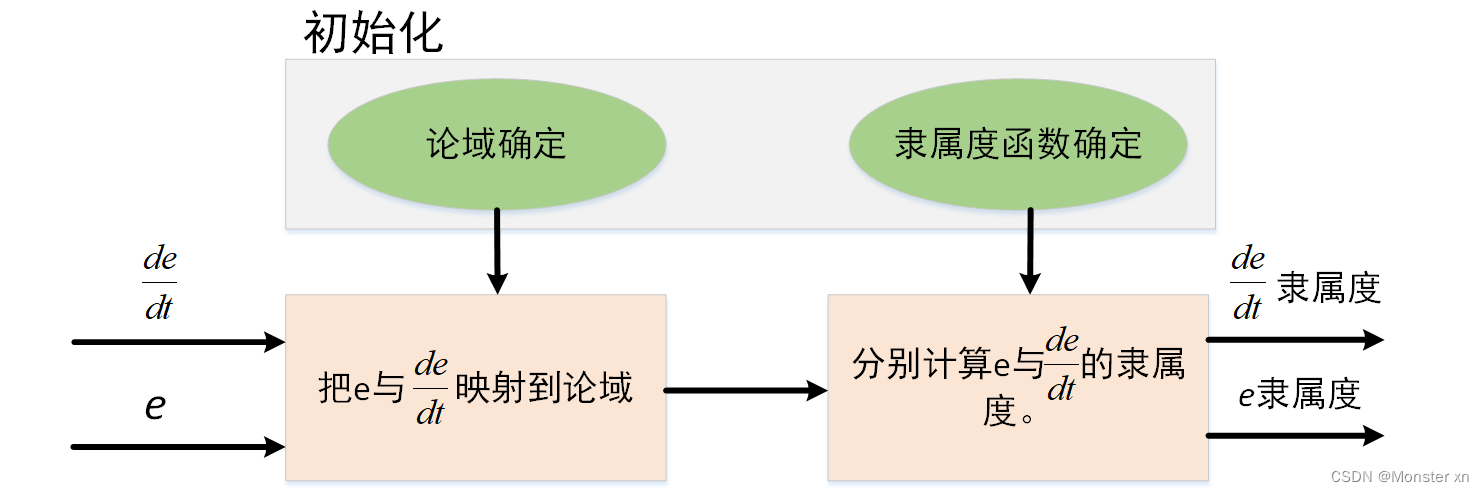
Para realizar a fuzzificação, primeiro é necessário inicializar a fuzzificação, que inclui a determinação do domínio do discurso e a determinação da função de pertinência.
1.1.1 Área temática
Pode-se dizer que o domínio do discurso é um intervalo determinado artificialmente. Como a entrada e, de/dt e o intervalo de saída kp, ki, kd são diferentes, é melhor mapear a entrada para o domínio do discurso para unificação em processamento. Após determinar o escopo do domínio do discurso, é necessário realizar a classificação fuzzy no domínio do discurso, que é dividir o domínio do discurso. Assumindo que o domínio do discurso é [-3, 3], divida o domínio do discurso em 5 partes iguais, ou seja, [-3, -2], [-2, -1], [-1, 0], [0 , 1], [1, 2], [2, 3]. Em seguida, divida cada ponto final em graus, na ordem: -3—>NB (negativo grande), -2—>NM (negativo médio), -1——>NS (negativo pequeno), 0—>ZO(zero), 1 ---->PS(positivo pequeno), 2---->PM(positivo médio), 3---->PB(positivo grande). Supondo que o intervalo de entrada e seja [-10, 10], o valor de e neste momento é 8 e o valor após o mapeamento é 2,4 e 2,4 está no intervalo [2, 3], então o ponto está entre o meio e a direita. O diagrama esquemático é o seguinte:

1.1.2 Determinação da função de membro.
Funções de pertinência comuns incluem funções de pertinência triangulares, funções de pertinência trapezoidais e funções de pertinência parabólicas. Tomando a função de pertinência triangular mais simples como exemplo, a forma é mostrada na figura abaixo:
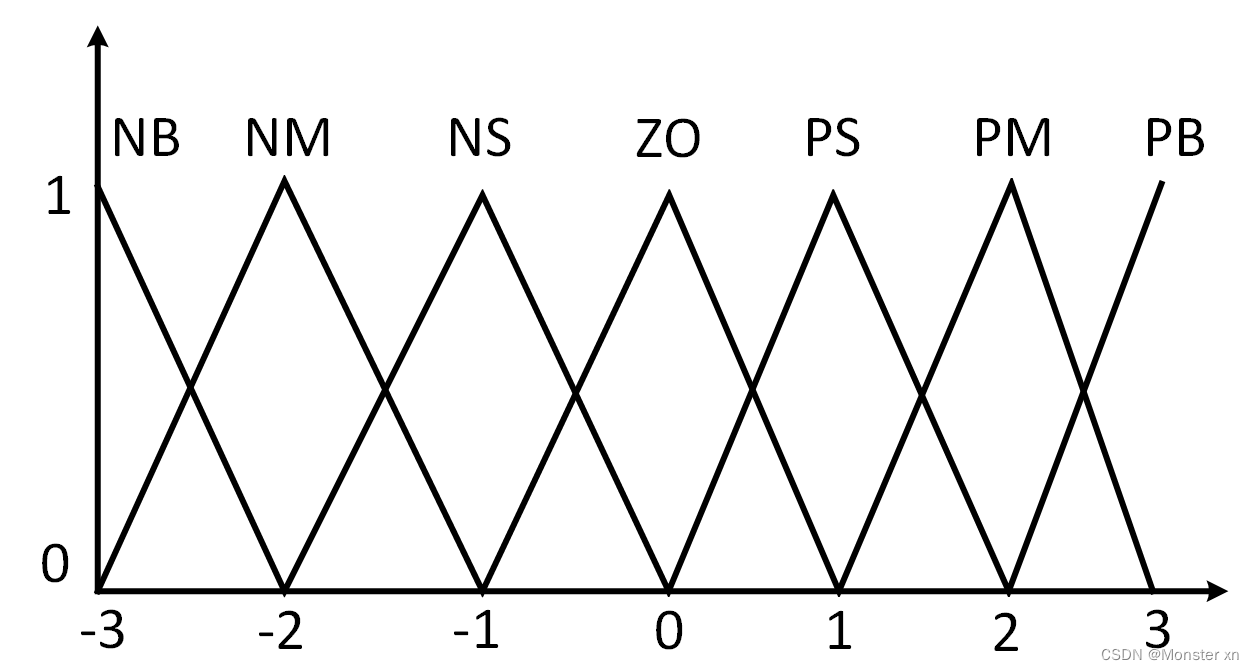
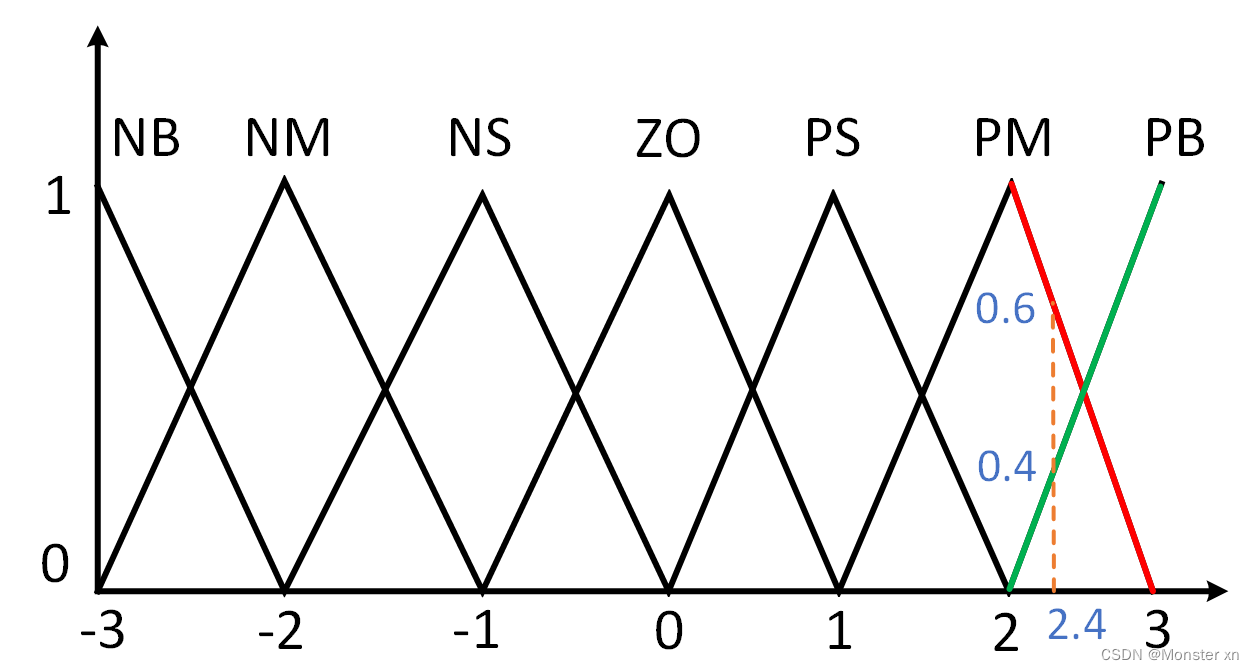
Como pode ser visto na figura acima, o intervalo de valores da função de pertinência é [0, 1]. Se o valor da entrada e após o mapeamento for 2,4, então os valores correspondentes à linha vermelha e à linha verde na figura abaixo são 0,6 e 0,4 respectivamente. Esses dois são o grau de pertinência, indicando que a probabilidade de o a entrada pertence a PM é 0,6, e a probabilidade de pertencer a PB é 0,4. Portanto, o grau de adesão também é uma probabilidade.
A partir da explicação do domínio do discurso e da função de pertinência acima, o processo de fuzzificação pode ser resumido: mapeamento de intervalo, e o grau de pertinência é calculado de acordo com a função de pertinência. O fluxograma é o seguinte:
1.2 Raciocínio confuso
Raciocínio difuso, ou seja, consultar a tabela de acordo com o grau de pertinência de e e de/dt para obter o tamanho da saída, ou seja, NB, NS, etc. Portanto, o trabalho central do raciocínio difuso é construir uma tabela de raciocínio. A tabela de inferência comumente utilizada pelo PID fuzzy é mostrada na figura abaixo:



O seguinte usa um exemplo para ilustrar como usar a tabela de regras.
Suponha que a entrada e neste momento seja 8, de/dt seja -12, e a faixa de e seja [-10,10], e a faixa de de/dt seja [-20,20]. Então, por meio de fuzzificação, os graus de pertinência de e são 0,6 (PM) e 0,4 (PB), e os graus de pertinência de de/dt são 0,8 (NM) e 0,2 (NS). Então, os graus de pertinência de e e de/dt são dois Combinando os dois e realizando uma pesquisa na tabela, obtém-se o relacionamento na tabela a seguir:
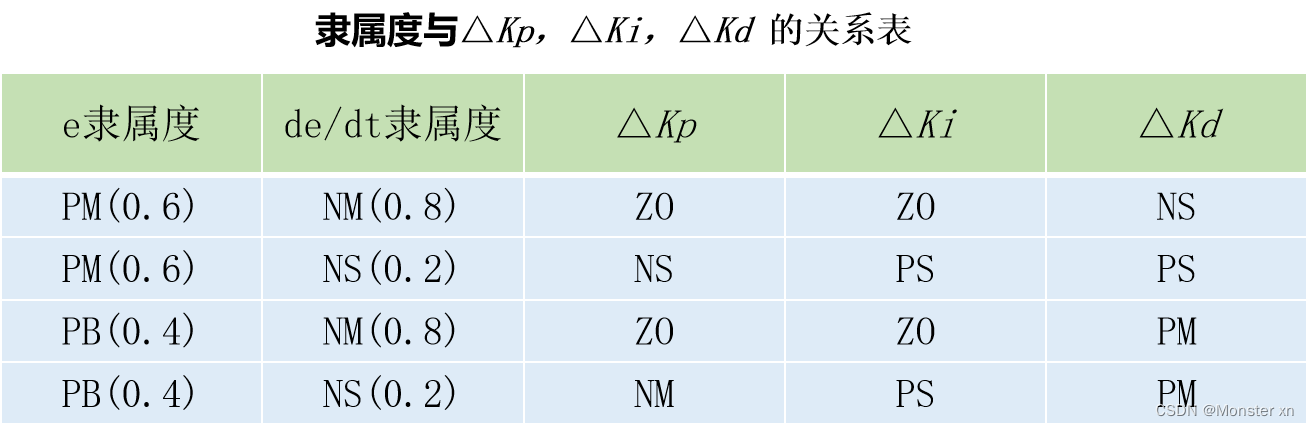
Em seguida, calcule o grau de pertinência de cada saída Kp, Ki, Kd.
Tome Kp como exemplo:
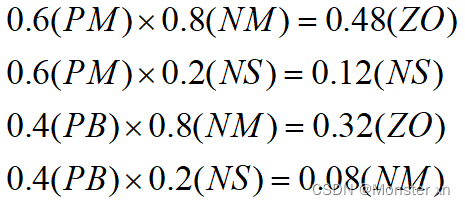
Da mesma forma, Ki e Kd também calculam o grau de pertinência.
Finalmente, o grau de pertinência de cada saída é integrado, como Kp. De acordo com o cálculo acima, o grau de pertinência de Kp é 0,8 (ZO), 0,12 (NS) e 0,08 (NM).
1.3 Desfoque
A defuzzificação consiste em calcular o valor da saída no domínio do discurso de acordo com o grau de pertinência de cada saída obtido por inferência difusa e, em seguida, obter a saída de acordo com a relação de mapeamento de intervalo.
1.3.1 Calcular o valor da saída no domínio do discurso
O exemplo acima é usado para ilustrar o processo de cálculo. Pode ser visto acima que o grau de pertinência de Kp é 0,8 (ZO), 0,12 (NS) e 0,08 (NM). Na explicação do universo, o valor de ZO foi definido como 0, o valor de NS é definido como -1 e o valor de NM O valor é definido como -2. Então a expectativa de Kp é:

Tomando a expectativa como o valor de Kp no domínio do discurso, após determinar o intervalo de Kp, o valor de saída de Kp pode ser obtido de acordo com a fórmula de mapeamento de intervalo.
O acima é o fluxo do controlador difuso.
Vale a pena notar que a saída Kp, Ki, Kd são incrementos. Durante a inicialização, o intervalo (intervalo) de entrada e saída deve ser determinado para mapeamento de intervalo.
2.1 Implementação C++ do controlador PID difuso
Esta versão da função de pertinência é uma função de pertinência triangular fixa e o domínio do discurso é fixado em [-3, 3] .
FuzzyPID.h
#ifndef FuzzyPID_H
#define FuzzyPID_H
class FuzzyPID
{
public:
FuzzyPID();
~FuzzyPID();
void Get_grad_membership(float erro, float erro_c);
float Quantization(float maximum, float minimum, float x);
float Inverse_quantization(float maximum, float minimum, float qvalues);
void GetSumGrad();
void GetOUT();
float FuzzyPIDcontroller(float e_max, float e_min, float ec_max, float ec_min, float kp_max, float kp_min, float erro, float erro_c, float ki_max, float ki_min,float kd_max, float kd_min,float erro_pre, float errp_ppre);
const int num_area = 8; //划分区域个数
//float e_max; //误差做大值
//float e_min; //误差最小值
//float ec_max; //误差变化最大值
//float ec_min; //误差变化最小值
//float kp_max, kp_min;
float e_membership_values[7] = {
-3,-2,-1,0,1,2,3}; //输入e的隶属值
float ec_membership_values[7] = {
-3,-2,-1,0,1,2,3 };//输入de/dt的隶属值
float kp_menbership_values[7] = {
-3,-2,-1,0,1,2,3 };//输出增量kp的隶属值
float ki_menbership_values[7] = {
-3,-2,-1,0,1,2,3 }; //输出增量ki的隶属值
float kd_menbership_values[7] = {
-3,-2,-1,0,1,2,3 }; //输出增量kd的隶属值
float fuzzyoutput_menbership_values[7] = {
-3,-2,-1,0,1,2,3 };
//int menbership_values[7] = {-3,-};
float kp; //PID参数kp
float ki; //PID参数ki
float kd; //PID参数kd
float qdetail_kp; //增量kp对应论域中的值
float qdetail_ki; //增量ki对应论域中的值
float qdetail_kd; //增量kd对应论域中的值
float qfuzzy_output;
float detail_kp; //输出增量kp
float detail_ki; //输出增量ki
float detail_kd; //输出增量kd
float fuzzy_output;
float qerro; //输入e对应论域中的值
float qerro_c; //输入de/dt对应论域中的值
float errosum;
float e_gradmembership[2]; //输入e的隶属度
float ec_gradmembership[2]; //输入de/dt的隶属度
int e_grad_index[2]; //输入e隶属度在规则表的索引
int ec_grad_index[2]; //输入de/dt隶属度在规则表的索引
float gradSums[7] = {
0,0,0,0,0,0,0};
float KpgradSums[7] = {
0,0,0,0,0,0,0 }; //输出增量kp总的隶属度
float KigradSums[7] = {
0,0,0,0,0,0,0 }; //输出增量ki总的隶属度
float KdgradSums[7] = {
0,0,0,0,0,0,0 }; //输出增量kd总的隶属度
int NB = -3, NM = -2, NS = -1, ZO = 0, PS = 1, PM = 2, PB = 3; //论域隶属值
int Kp_rule_list[7][7] = {
{
PB,PB,PM,PM,PS,ZO,ZO}, //kp规则表
{
PB,PB,PM,PS,PS,ZO,NS},
{
PM,PM,PM,PS,ZO,NS,NS},
{
PM,PM,PS,ZO,NS,NM,NM},
{
PS,PS,ZO,NS,NS,NM,NM},
{
PS,ZO,NS,NM,NM,NM,NB},
{
ZO,ZO,NM,NM,NM,NB,NB} };
int Ki_rule_list[7][7] = {
{
NB,NB,NM,NM,NS,ZO,ZO}, //ki规则表
{
NB,NB,NM,NS,NS,ZO,ZO},
{
NB,NM,NS,NS,ZO,PS,PS},
{
NM,NM,NS,ZO,PS,PM,PM},
{
NM,NS,ZO,PS,PS,PM,PB},
{
ZO,ZO,PS,PS,PM,PB,PB},
{
ZO,ZO,PS,PM,PM,PB,PB} };
int Kd_rule_list[7][7] = {
{
PS,NS,NB,NB,NB,NM,PS}, //kd规则表
{
PS,NS,NB,NM,NM,NS,ZO},
{
ZO,NS,NM,NM,NS,NS,ZO},
{
ZO,NS,NS,NS,NS,NS,ZO},
{
ZO,ZO,ZO,ZO,ZO,ZO,ZO},
{
PB,NS,PS,PS,PS,PS,PB},
{
PB,PM,PM,PM,PS,PS,PB} };
int Fuzzy_rule_list[7][7] = {
{
PB,PB,PB,PB,PM,ZO,ZO},
{
PB,PB,PB,PM,PM,ZO,ZO},
{
PB,PM,PM,PS,ZO,NS,NM},
{
PM,PM,PS,ZO,NS,NM,NM},
{
PS,PS,ZO,NM,NM,NM,NB},
{
ZO,ZO,ZO,NM,NB,NB,NB},
{
ZO,NS,NB,NB,NB,NB,NB}};
//private:
};
#endif
FuzzyPID.cpp
#include "FuzzyPID.h"
FuzzyPID::FuzzyPID() //构造函数
{
kp = 0;
ki = 0;
kd = 0;
fuzzy_output = 0;
qdetail_kp = 0;
qdetail_ki = 0;
qdetail_kd = 0;
qfuzzy_output = 0;
errosum = 0;
}
FuzzyPID::~FuzzyPID()//析构函数
{
}
//输入e与de/dt隶属度计算函数///
void FuzzyPID::Get_grad_membership(float erro,float erro_c)
{
if (erro > e_membership_values[0] && erro < e_membership_values[6])
{
for (int i = 0; i < num_area - 2; i++)
{
if (erro >= e_membership_values[i] && erro <= e_membership_values[i + 1])
{
e_gradmembership[0] = -(erro - e_membership_values[i + 1]) / (e_membership_values[i + 1] - e_membership_values[i]);
e_gradmembership[1] = 1+(erro - e_membership_values[i + 1]) / (e_membership_values[i + 1] - e_membership_values[i]);
e_grad_index[0] = i;
e_grad_index[1] = i + 1;
break;
}
}
}
else
{
if (erro <= e_membership_values[0])
{
e_gradmembership[0] = 1;
e_gradmembership[1] = 0;
e_grad_index[0] = 0;
e_grad_index[1] = -1;
}
else if (erro >= e_membership_values[6])
{
e_gradmembership[0] = 1;
e_gradmembership[1] = 0;
e_grad_index[0] = 6;
e_grad_index[1] = -1;
}
}
if (erro_c > ec_membership_values[0] && erro_c < ec_membership_values[6])
{
for (int i = 0; i < num_area - 2; i++)
{
if (erro_c >= ec_membership_values[i] && erro_c <= ec_membership_values[i + 1])
{
ec_gradmembership[0] = -(erro_c - ec_membership_values[i + 1]) / (ec_membership_values[i + 1] - ec_membership_values[i]);
ec_gradmembership[1] = 1 + (erro_c - ec_membership_values[i + 1]) / (ec_membership_values[i + 1] - ec_membership_values[i]);
ec_grad_index[0] = i;
ec_grad_index[1] = i + 1;
break;
}
}
}
else
{
if (erro_c <= ec_membership_values[0])
{
ec_gradmembership[0] = 1;
ec_gradmembership[1] = 0;
ec_grad_index[0] = 0;
ec_grad_index[1] = -1;
}
else if (erro_c >= ec_membership_values[6])
{
ec_gradmembership[0] = 1;
ec_gradmembership[1] = 0;
ec_grad_index[0] = 6;
ec_grad_index[1] = -1;
}
}
}
/获取输出增量kp,ki,kd的总隶属度/
void FuzzyPID::GetSumGrad()
{
for (int i = 0; i <= num_area - 1; i++)
{
KpgradSums[i] = 0;
KigradSums[i] = 0;
KdgradSums[i] = 0;
}
for (int i=0;i<2;i++)
{
if (e_grad_index[i] == -1)
{
continue;
}
for (int j = 0; j < 2; j++)
{
if (ec_grad_index[j] != -1)
{
int indexKp = Kp_rule_list[e_grad_index[i]][ec_grad_index[j]] + 3;
int indexKi = Ki_rule_list[e_grad_index[i]][ec_grad_index[j]] + 3;
int indexKd = Kd_rule_list[e_grad_index[i]][ec_grad_index[j]] + 3;
//gradSums[index] = gradSums[index] + (e_gradmembership[i] * ec_gradmembership[j])* Kp_rule_list[e_grad_index[i]][ec_grad_index[j]];
KpgradSums[indexKp]= KpgradSums[indexKp] + (e_gradmembership[i] * ec_gradmembership[j]);
KigradSums[indexKi] = KigradSums[indexKi] + (e_gradmembership[i] * ec_gradmembership[j]);
KdgradSums[indexKd] = KdgradSums[indexKd] + (e_gradmembership[i] * ec_gradmembership[j]);
}
else
{
continue;
}
}
}
}
计算输出增量kp,kd,ki对应论域值//
void FuzzyPID::GetOUT()
{
for (int i = 0; i < num_area - 1; i++)
{
qdetail_kp += kp_menbership_values[i] * KpgradSums[i];
qdetail_ki += ki_menbership_values[i] * KigradSums[i];
qdetail_kd+= kd_menbership_values[i] * KdgradSums[i];
}
}
//模糊PID控制实现函数/
float FuzzyPID::FuzzyPIDcontroller(float e_max, float e_min, float ec_max, float ec_min, float kp_max, float kp_min, float erro, float erro_c,float ki_max,float ki_min,float kd_max,float kd_min,float erro_pre,float errp_ppre)
{
errosum += erro;
//Arear_dipart(e_max, e_min, ec_max, ec_min, kp_max, kp_min,ki_max,ki_min,kd_max,kd_min);
qerro = Quantization(e_max, e_min, erro);
qerro_c = Quantization(ec_max, ec_min, erro_c);
Get_grad_membership(qerro, qerro_c);
GetSumGrad();
GetOUT();
detail_kp = Inverse_quantization(kp_max, kp_min, qdetail_kp);
detail_ki = Inverse_quantization(ki_max, ki_min, qdetail_ki);
detail_kd = Inverse_quantization(kd_max, kd_min, qdetail_kd);
qdetail_kd = 0;
qdetail_ki = 0;
qdetail_kp = 0;
/*if (qdetail_kp >= kp_max)
qdetail_kp = kp_max;
else if (qdetail_kp <= kp_min)
qdetail_kp = kp_min;
if (qdetail_ki >= ki_max)
qdetail_ki = ki_max;
else if (qdetail_ki <= ki_min)
qdetail_ki = ki_min;
if (qdetail_kd >= kd_max)
qdetail_kd = kd_max;
else if (qdetail_kd <= kd_min)
qdetail_kd = kd_min;*/
kp = kp + detail_kp;
ki = ki + detail_ki;
kd = kd + detail_kd;
if (kp < 0)
kp = 0;
if (ki < 0)
ki = 0;
if (kd < 0)
kd = 0;
detail_kp = 0;
detail_ki=0;
detail_kd=0;
float output = kp*(erro - erro_pre) + ki * erro + kd * (erro - 2 * erro_pre + errp_ppre);
return output;
}
///区间映射函数///
float FuzzyPID::Quantization(float maximum,float minimum,float x)
{
float qvalues= 6.0 *(x-minimum)/(maximum - minimum)-3;
//float qvalues=6.0*()
return qvalues;
//qvalues[1] = 3.0 * ecerro / (maximum - minimum);
}
//反区间映射函数
float FuzzyPID::Inverse_quantization(float maximum, float minimum, float qvalues)
{
float x = (maximum - minimum) *(qvalues + 3)/6 + minimum;
return x;
}
Teste o controlador PID difuso:
#include <iostream>
#include "FuzzyPID.h"
int main()
{
FuzzyPID myfuzzypid;
float Target = 600;
float actual = 0;
float e_max =1000;
float e_min = -1000;
float ec_max = 800;
float ec_min = -800;
float kp_max =100;
float kp_min = -100;
float ki_max = 0.1;
float ki_min = -0.1;
float kd_max = 0.01;
float kd_min = -0.01;
float erro;
float erro_c;
float erro_pre = 0;
float erro_ppre = 0;
erro =Target - actual;
erro_c = erro - erro_pre;
for (int i = 0; i < 100; i++)
{
float u;
u = myfuzzypid.FuzzyPIDcontroller(e_max, e_min, ec_max, ec_min, kp_max, kp_min, erro, \
erro_c,ki_max,ki_min,kd_max,kd_min,erro_pre,erro_ppre);
actual +=u;
erro_ppre = erro_pre;
erro_pre = erro;
erro = Target - actual;
erro_c= erro - erro_pre;
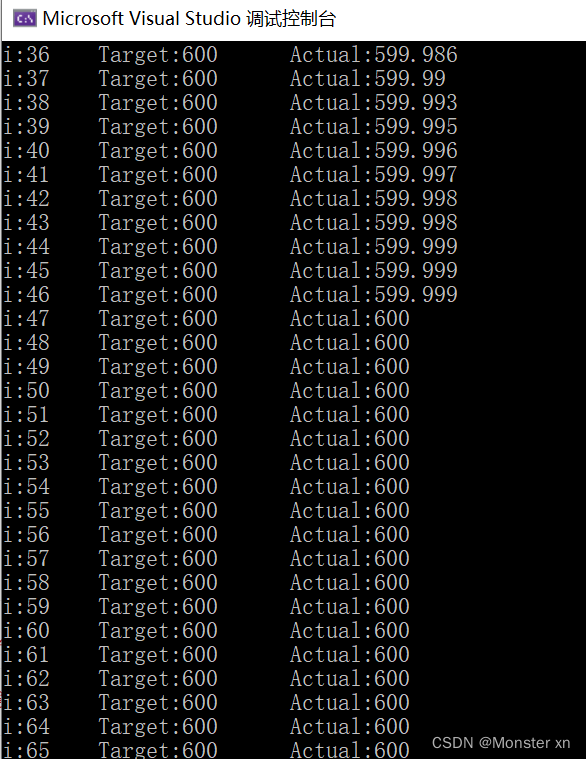
std::cout << "i:" << i << "\t" << "Target:" << Target << "\t" << "Actual:" << actual << std::endl;
}
}
Resultado da execução :
Este artigo reproduz principalmente a parte do princípio de controle difuso e as rotinas de código e as publica no CSDN para conveniência de gerenciamento e coleta.
Endereço original: https://www.codeong.com/cs105632129/