correr
É melhor escolher o código-fonte orbslam2 original:
link do código-fonte orbslam2
A coisa mais importante a dizer é que você deve usar a imagem em tons de cinza para executar e pode usar diretamente o código-fonte do orbslam2
Não use mapas de cores
Embora o código use logicamente uma imagem colorida e finalmente a converta em uma imagem em tons de cinza, o conjunto de dados Kitti estima que a imagem em tons de cinza foi processada até certo ponto, portanto, não pode ser executada com uma imagem colorida ou os resultados variam muito.
análise
Se apenas testar ATE
Em seguida, use o comando evo_ape da ferramenta EVO e, em seguida, use SE(3) para alinhar, ou seja, adicione um "-a" para obter o efeito original.
Se você deseja obter os mesmos indicadores do papel original, é recomendável usar
a ferramenta de avaliação kitti
e prestar atenção em –align 6dof ao usá-la
Efeito
Aqui está o resultado do papel:
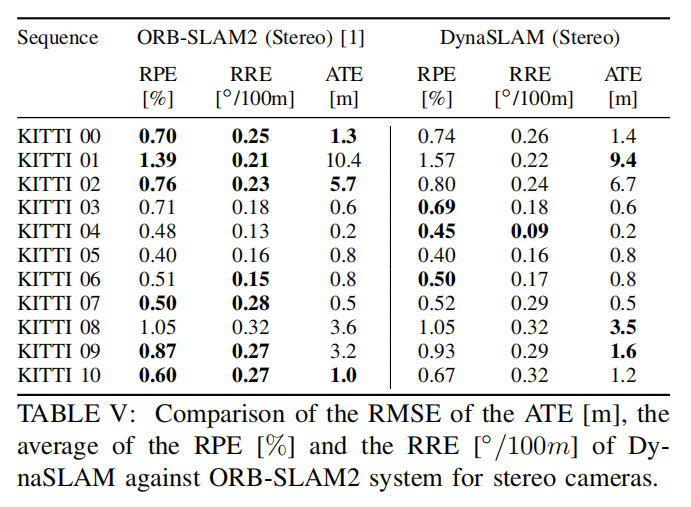
Aqui está o que eu corri:
Sequence: 0
Translational error (%): 0.6991026226893858
Rotational error (deg/100m): 0.2523974630223109
ATE (m): 1.2984646007317502
RPE (m): 0.018502443138574583
RPE (deg): 0.05736175303528678
Sequence: 1
Translational error (%): 1.514947701762084
Rotational error (deg/100m): 0.18027862843369094
ATE (m): 11.117947319921196
RPE (m): 0.04968054045036293
RPE (deg): 0.031507571575900985
Sequence: 2
Translational error (%): 0.7525993537725468
Rotational error (deg/100m): 0.2269945253414965
ATE (m): 5.130630778738071
RPE (m): 0.021849862176282576
RPE (deg): 0.04758866147042561
Sequence: 3
Translational error (%): 0.6899142961329343
Rotational error (deg/100m): 0.1673791037265687
ATE (m): 0.5803183212304138
RPE (m): 0.014294846969853659
RPE (deg): 0.03961556060219599
Sequence: 4
Translational error (%): 0.4300742392029325
Rotational error (deg/100m): 0.10515225483002512
ATE (m): 0.16101855759793451
RPE (m): 0.016565951455097126
RPE (deg): 0.03158180202868769
Sequence: 5
Translational error (%): 0.3905637158475052
Rotational error (deg/100m): 0.15604136832831123
ATE (m): 0.7649068203682212
RPE (m): 0.011983678542626379
RPE (deg): 0.039204634606847616
Sequence: 6
Translational error (%): 0.5203046660978126
Rotational error (deg/100m): 0.1439960936885502
ATE (m): 0.7889731979084904
RPE (m): 0.013310449181431165
RPE (deg): 0.0315866848256745
Sequence: 7
Translational error (%): 0.5571768718251755
Rotational error (deg/100m): 0.3319881218290934
ATE (m): 0.5785849329823173
RPE (m): 0.012143307940867536
RPE (deg): 0.03552662552021929
Sequence: 8
Translational error (%): 1.041184032644816
Rotational error (deg/100m): 0.32117829134755604
ATE (m): 3.5162713516630433
RPE (m): 0.023687762088556802
RPE (deg): 0.04179357212128304
Sequence: 9
Translational error (%): 0.8644970446120377
Rotational error (deg/100m): 0.24360228090791816
ATE (m): 3.059875461079776
RPE (m): 0.017498939649824227
RPE (deg): 0.042781380143976186
Sequence: 10
Translational error (%): 0.6257678488722856
Rotational error (deg/100m): 0.29942067015497
ATE (m): 1.1340155005976165
RPE (m): 0.01393528095606781
RPE (deg): 0.04694607736522295
Os resultados do artigo ORBSLAM2 original são quase os mesmos.