Análise comparativa de parâmetros estatísticos domésticos e não domésticos de câmeras TOF
Kinect v2
O Kinect v2 foi lançado pela Microsoft em 2014, conforme mostrado na Figura 1-1. Comparado com o Kinect v1, ele teve uma grande evolução em hardware e software, e apresentou melhor desempenho em termos de erros sistemáticos e não sistemáticos de medição de profundidade.
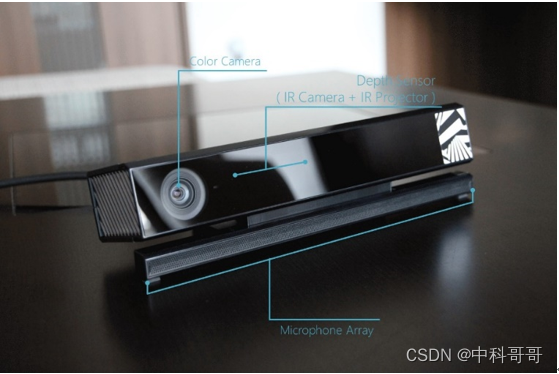
Existem três câmeras no Kinect v2, da esquerda para a direita: câmera colorida, câmera infravermelha e
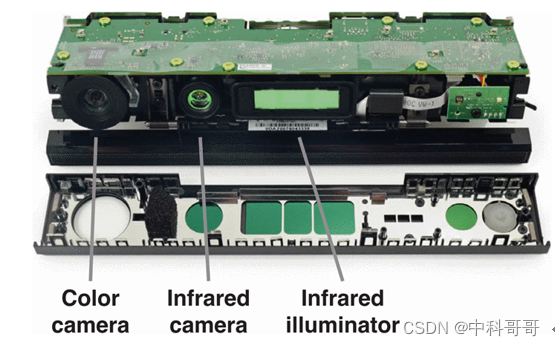
projetor infravermelho. O tempo de voo dos pixels é registrado por uma câmera infravermelha. Internamente, a modulação de onda e a detecção de fase são usadas para estimar a distância aos obstáculos (ToF indireto).
Seu tamanho físico é 250mmL×70mmW×45mmH, a faixa de profundidade é 0,5-4,5m, a resolução 3D é 512×424, a resolução RGB é 1920×1080, a taxa de quadros é 30FPS e o campo de visão é 70°H , 60°V , usando a interface USB 3.0, que pode ser conectada ao driver ROS.
PMD CamCube 3.0
CamCube3.0 tem 200x200 pixels, que pode obter distância de alta resolução e informações em escala de cinza ao mesmo tempo. Usando o mais recente chip PMD 41k-S2 de alta sensibilidade e desempenho aprimorado, ele pode obter dados de maior precisão em curto tempo de integração e longa distância e adota a tecnologia SBI (supressão de luz de fundo), e o produto pode ser usado em ambientes internos e ambientes externos. A lente óptica otimizada (F1,1) ainda pode fornecer excelente desempenho 3D para aplicações de amplo campo de visão. O processamento antidesfoque de movimento permite a medição de objetos em movimento rápido. A função de configuração de ROI (Região de Interesse) pode atender à resolução horizontal sob aplicação específica. O gatilho de sincronização de hardware pode ser facilmente usado com CamCube3.0 para outros sistemas. Para requisitos de processamento de imagem mais avançados, o CamCube3.0 pode fornecer dados brutos e algoritmos para processar ainda mais esses dados.

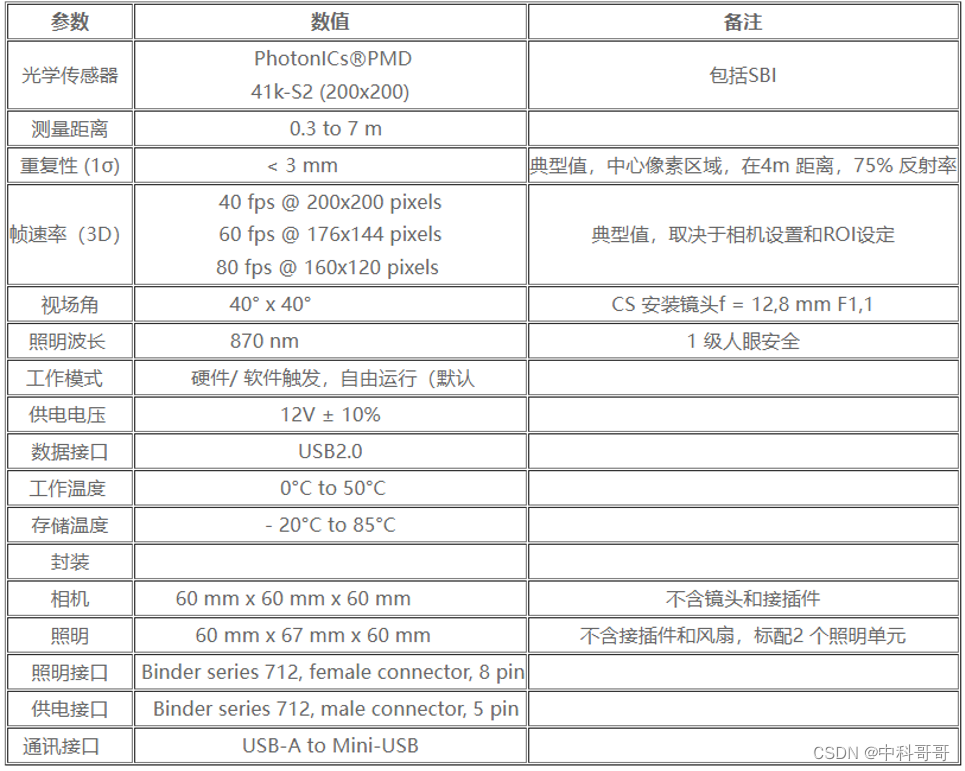
A função de interface API estendida (PMDSDK2) pode ajustar até quatro saídas de taxa de quadros em diferentes frequências de modulação e tempos de integração, de modo a obter diferentes informações de cena de acordo com as condições reais. Devido ao design modular, o hardware e o software podem ser facilmente ajustados para diferentes ocasiões. Por exemplo, troque a lente ou mude a iluminação ativa para atender a necessidades especiais. Como o firmware pode ser atualizado, o CamCube3.0 pode ser facilmente atualizado para versões subsequentes. Quando o produto é enviado, ele vem com software de exibição CamVis3, função de interface API PMDSDK2 e interface MATLAB PMDSDK, que pode facilmente transformar ideias em realidade. Seus parâmetros técnicos são mostrados na Figura 1-4.
Camcube3.0 tem uma distância de trabalho mais ampla do que Kinect v1, e a distância de trabalho pode ser ajustada (a distância de trabalho pode ser estendida para dezenas de metros alterando a frequência de modulação da fonte de luz), e o campo de visão pode ser ajustado por mudando a lente óptica, com precisão de profundidade confiável, cada pixel corresponde a dados 3D. Para Kinect, a resolução na direção da profundidade não é clara. Quando o padrão do alvo não pode ser detectado com sucesso, geralmente há buracos no mapa de profundidade e a precisão da profundidade é de cerca de 3 cm a 4 cm.
Em termos de resolução do objeto alvo: o Kinect não consegue distinguir os dedos muito bem, enquanto o Camcube3.0 pode detectar características mais finas. As câmeras PMD têm maior capacidade de resistir à interferência da luz ambiente. As câmeras PMD são adequadas para ambientes externos. Em termos de volume, as câmeras PMD são menores que o Kinect. Em termos de custo,
Mesa Swiss Ranger 4000
A MESA Imaging foi criada em julho de 2006 para comercializar uma câmera 3D de mapeamento de profundidade de tempo de voo. Além da premiada tecnologia SwissRanger™, a MESA conseguiu aproveitar sua ampla experiência para desenvolver soluções de câmera sob medida.
O Swiss Ranger 4000 fornece dados de imagem 3D de alta resolução em tempo real. O dispositivo conta com tecnologia de sensor de imagem capaz de capturar um conjunto de dados tridimensional (chamado mapa de profundidade) em tempo real e é construído em um único invólucro compacto de estado sólido.
No coração da câmera está uma tecnologia de sensor avançada que usa o princípio de medição de distância de tempo de voo, onde a luz infravermelha de uma fonte de iluminação dentro da câmera é refletida por objetos na cena e viaja de volta para a câmera, onde sua o tempo preciso de chegada é determinado por dezenas de milhares de cada um dos pixels do sensor é medido de forma independente. Dois modelos de faixa de medição estão disponíveis, até 10 metros. As datas são enviadas via USB 2.0 ou Ethernet para um computador para visualização, interpretação e processamento. Vários modelos estão disponíveis para atender às necessidades do usuário.
Seu tamanho físico é de 65×65×68mm, a taxa máxima de quadros é de 50FPS, a resolução RGB é de 176×144 e o campo de visão é de 43,6°×34,6°. Pode ser coletado via USB ou Ethernet, e sua produção tem foi descontinuado.
Creative Senz3D/DepthSense 525
O sensor de tempo de voo (ToF) Sony DepthSenseTM integra várias tecnologias avançadas para fornecer imagens 3D em tempo real rápidas e confiáveis. Ao utilizar o demodulador optoeletrônico assistido por corrente (CAPD) e sua estrutura de pixels retroiluminados de alto desempenho, juntamente com o design de câmera especializado da LUCID, a Sony conseguiu obter o máximo desempenho de tempo de voo nas câmeras da série Helios 3D da LUCID.
A tecnologia Time-of-flight (ToF) tem sido usada na indústria industrial por muitos anos, mas o lançamento do sensor Sony IMX556 DepthSense ToF traz a precisão e precisão da detecção 3D para um novo nível na indústria. Com sua estrutura de pixel DepthSense exclusiva, o sensor ToF da Sony pode reconstruir de forma mais confiável o objeto em teste no formato 3D, mais detalhado e com taxa de quadros mais rápida. Combinado com a própria tecnologia de pesquisa e desenvolvimento de câmeras da LUCID, o sensor DepthSense da Sony nos trará o maior potencial para aplicações industriais. A resolução RGB do DepthSense 525 é de 320 × 240, o campo de visão é de 74 ° V × 58 ° H e o intervalo de profundidade é de 0,15-1 m.

ifm
ifm O3D303 pode ser usado para avaliação visual de distância, nível ou volume, medição de distância confiável por medição de intervalo de tempo, iluminação, medição e avaliação em uma unidade, distância de saída 93.000 e valor cinza por medição, para facilitar a avaliação detalhada da aplicação, integrado através de um software intuitivo de configuração de parâmetros.
Existem dois tipos de resolução de imagem, 176 × 132 ou 352 × 264 no modo fixo 2 × 2, a faixa de profundidade é 0,3-8 m, a taxa de quadros é 25FPS, o campo de visão é 60 ° V × 45 ° H e o tamanho físico é de 120 × 95 × 76 mm, a interface usa uma interface Ethernet e suporta drivers ROS e ROS2.

A resolução 3D do ifm O3X100 é de 224 × 172, a faixa de profundidade é de 0,05-3 m, a taxa de quadros máxima é de 20 FPS, suporta configuração independente, o campo de visão é de 60 ° V × 45 ° A, o tamanho físico é de 80 mm × 43,5 mm × 21 mm, a interface usa interface Ethernet, suporte ROS, driver ROS2.

basler
A Basler, fabricante líder mundial de câmeras industriais e acessórios para câmeras de alta qualidade, desenvolve e fabrica câmeras industriais, lentes industriais e outros componentes de visão industrial para aplicações nos mercados industrial, de transporte e médico.
A câmera Basler blaze é uma câmera 3D industrial que funciona de acordo com o princípio Time-of-Flight pulsado. Equipado com um diodo laser (VCSEL) operando na faixa do infravermelho próximo (NIR) a 940 nm, um único disparo pode gerar imagens de várias partes contendo dados 2D e 3D, incluindo mapas de alcance, intensidade e confiança.
O Basler blaze usa a mais recente tecnologia de chip DepthSense™ IMX556PLR da Sony para obter excelentes imagens 3D; usando o método ToF (Time-of-Flight), ele pode realizar medições ópticas com precisão milimétrica; grande faixa de medição, por exemplo, pode cobrir dois paletes europeus ou um carro pequeno; transmissão em tempo real de nuvem de pontos 3D pré-processada e imagens de intensidade 2D; pode trabalhar em luz natural, com proteção IP67, ainda pode obter resultados de imagem estáveis sob condições adversas; não afetado pela luz e contraste Impacto; fácil integração do sistema graças ao design compacto e interface Gigabit Ethernet (GigE); interface de programação amigável, fácil de usar e independente de plataforma com programas de amostra; operação confiável em sistemas multicâmera sem interferência mútua.

O tamanho físico da câmera blaze-101 é de 100 mm × 81 mm × 64 mm, a resolução é de 640 × 480, a interface GigE Ethernet é usada, o campo de visão é de 67 ° × 51 °, a faixa de trabalho é de 0 a 10 m e a precisão é de ± 5 mm [0,5- 5,5 m], a taxa de quadros é de 30 FPS.
Terabee
A Terabee é líder em detecção de tempo de voo TOF. Módulos de sensor, software embarcado e soluções prontas para uso para integradores de sistema fazem da Terabee o parceiro ideal para LiDAR, detecção de profundidade 3D, imagens térmicas de baixa resolução e sistemas de posicionamento de RF. A Terabee possui atualmente três câmeras TOF 3D, a saber: TeraRanger Evo 64px, Terabee 3Dcam 80×60 e Terabee 3Dcam VGA.
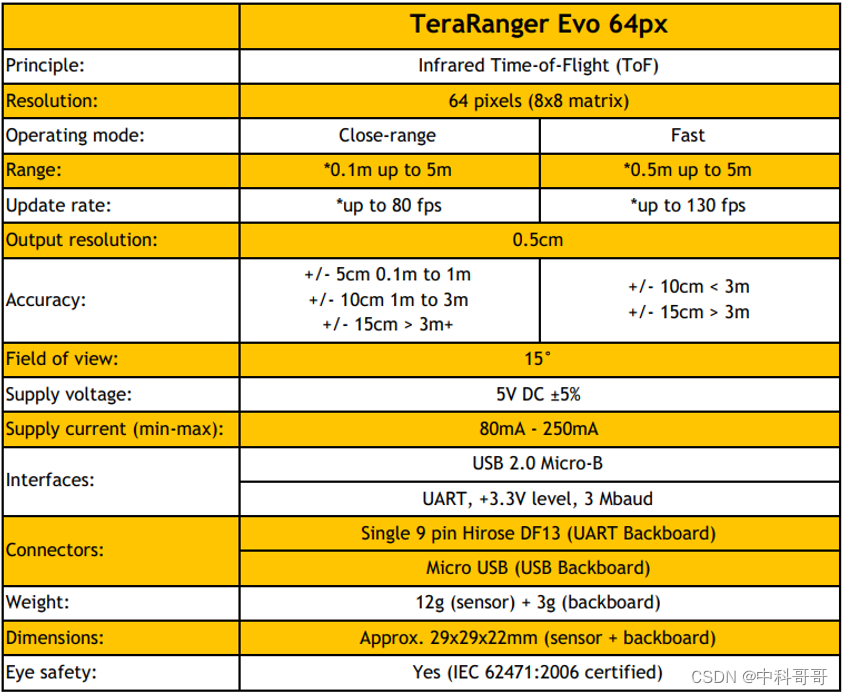
Desenvolvido para uso interno, o Evo 64px gera uma matriz 8×8 de leituras de distância em alta velocidade em um campo de visão de 15 graus, com alcance máximo de até 5 metros. Tudo em um formato compacto e leve, pesando apenas 12 gramas. Uma GUI gratuita está disponível para testes rápidos em um PC, e um driver ROS também foi desenvolvido para maior conveniência plug-and-play.
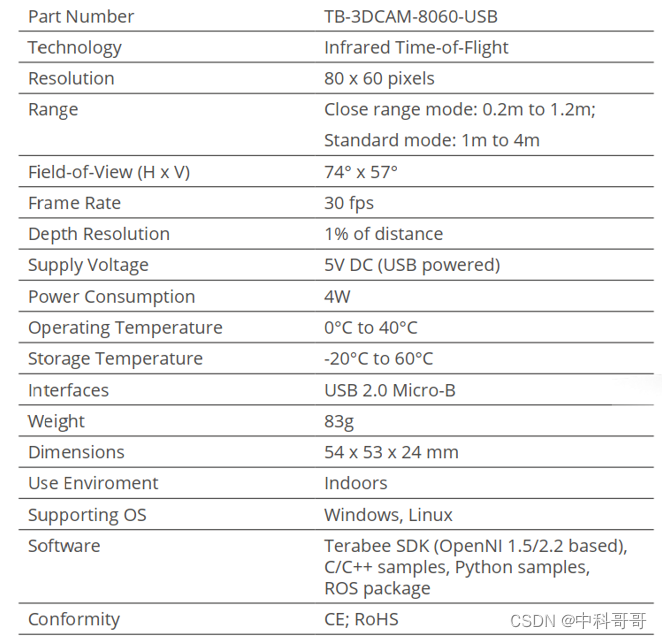
Terabee 3Dcam 80×60 tem resolução de 80×60 pixels e campo de visão de 74°×57°. O Terabee 3Dcam vem com SDK baseado em OpenNI, exemplos de C/C++, exemplos de Python e pacote ROS para fácil configuração e transmissão de dados de profundidade via interface USB no sistema operacional Windows ou Linux.

A primeira escolha para câmera de profundidade de nível industrial Terabee 3Dcam VGA, robusta, segura, compacta, com resolução VGA e o mais amplo campo de visão. Como o mais novo membro dos produtos da Indústria 4.0 da Terabee, o 3Dcam VGA combina preço, desempenho e versatilidade. O dispositivo resistente com classificação IP65 e IP67 é a menor, mais leve e mais acessível câmera 3D time-of-flight de nível industrial em sua classe.
3Dcam VGA tem o campo de visão mais amplo (90° × 67,5°), resolução VGA (640 × 480 pixels), como um produto a laser Classe 1, 3Dcam VGA é um componente chave da automação industrial e soluções da Indústria 4.0. É adequado para aplicações como logística, robôs móveis, interação humano-computador, monitoramento de nível de líquido, agricultura inteligente e detecção de movimento e pessoas.
Seu tamanho físico é de 100 × 103 × 32 mm, a resolução RGB é de 640 × 480 (VGA) e pode fornecer informações de profundidade, nuvem de pontos etc. campo de visão de 90°× 67,5°, usando interface GigE Ethernet e interface RS485.

Phab2 Pro
O Lenovo Phab2 Pro, lançado em conjunto pelo Google e pela Lenovo em novembro de 2016, é o primeiro celular do mundo compatível com a tecnologia Google Project Tango. Sua câmera de profundidade adota a solução de tecnologia TOF, desenvolvida em conjunto pela PMD e pela Infineon.
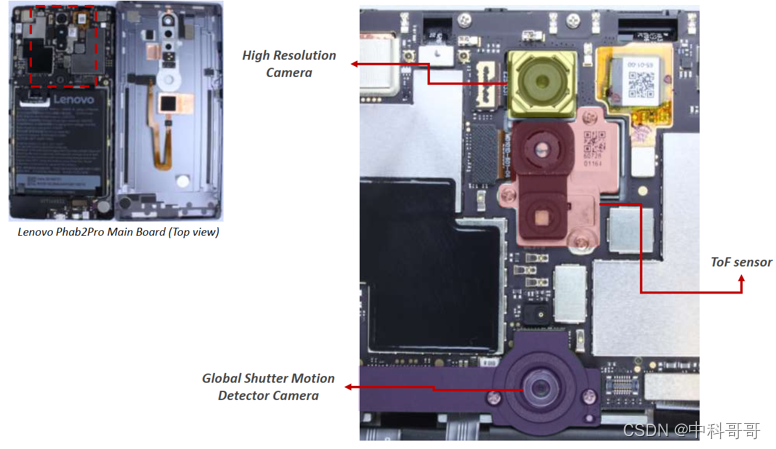
O Phab2 Pro usa um sensor de câmera tripla para implementar essa tecnologia TOF. O subsistema usa o sensor de imagem CMOS (CIS) de resolução de 16 megapixels da Samsung, CIS de resolução VGA da Omnivision e um sensor de imagem 3D de resolução de 38.000 pixels da Infineon e pmd, integrado a uma superfície de cavidade vertical próxima ao infravermelho No subsistema do laser emissor (VCSEL).
Para entregar a cena 3D, uma câmera tripla de alta resolução fornece textura e uma câmera de obturador global fornece rastreamento de movimento. Por fim, o sensor ToF fornece percepção de profundidade em alta taxa graças ao emissor VCSEL, que permite que o telefone entenda o espaço e o movimento tão rapidamente quanto um ser humano.
Orbi Zhongguang Femto
A Orbi Zhongguang é uma fornecedora líder do setor de soluções de tecnologia geral de percepção visual 3D. Em termos de tecnologia, possui uma compreensão abrangente das principais tecnologias subjacentes, incluindo chips de mecanismo de profundidade, chips fotossensíveis, sistemas ópticos dedicados, SDKs e algoritmos de aplicativos do setor. A tecnologia realiza pesquisa e desenvolvimento independente de pilha completa e realiza um layout de campo completo de luz estruturada, iToF, binocular, dToF, Lidar e medição 3D industrial na direção horizontal técnica.
Femto é uma câmera RGBD de alto desempenho desenvolvida com base na tecnologia de plataforma de visão inteligente iToF de Orbi Zhongguang. A distância aplicável é de 0,2 m-5 m. É equipada com módulos Rx e Tx iToF de alta qualidade, que podem produzir alta integridade e alta dados de profundidade de precisão. , suporte a interface USB 3.0/Tpye-C, pode realizar rastreamento 3D, identificação e reconstrução e outros requisitos de aplicação. Seu tamanho físico é 99,4 mm L × 69 mm L × 25 mm A, a faixa de profundidade é de 0,2-5 m, a precisão é de 1%, a resolução de profundidade @ taxa de quadros é 640 × 480 @ 5/10/15/30FPS e a interface é USB3. 0.
