Análise Comparativa de Parâmetros Estatísticos de Câmeras de Luz Estruturada Domésticas e Não Domésticas
1. Kinect v1
A câmera de profundidade Kinect v1 possui uma câmera colorida RGB, uma câmera CMOS infravermelha e um emissor infravermelho. A câmera CMOS de infravermelho da câmera e o emissor de infravermelho são distribuídos horizontalmente da esquerda para a direita. A câmera usa a tecnologia Light Coding (Light Coding) aprimorada baseada em luz estruturada para obter as informações de profundidade do objeto. O Kinect v1 possui um motor de transmissão Moving Touch para controle de elevação, que geralmente é ajustado de acordo com sua posição e distância do usuário. Kinect v1 é mostrado na figura, da esquerda para a direita são projetor infravermelho, câmera colorida, câmera infravermelha.

Sua resolução RGB é de 640 × 480, a taxa de quadros é de 30 FPS, a resolução de profundidade é de 320 × 240, a taxa de quadros é de 30 FPS e a interface é USB 2.0.
2. Intel RealSense
As câmeras de profundidade Intel® RealSense™ D415 e D435 integram o processador Intel D4 Vision e o módulo de profundidade em um pacote pequeno, poderoso, de baixo custo e pronto para implantação. Projetadas para fácil configuração e portabilidade, as câmeras da série Intel® RealSense™ D400 são ideais para desenvolvedores, fabricantes e inovadores que implementam a detecção de profundidade em seus dispositivos. Capazes de capturar ambientes internos ou externos, as câmeras apresentam capacidade de longo alcance e resolução de profundidade de até 1280x720 a 30 quadros por segundo (fps).
Ideal para aplicações de alta precisão, como digitalização 3D, o D415 possui um campo de visão padrão que oferece maior resolução de profundidade para objetos menores ou quando são necessárias medições mais precisas. E a D415 possui um obturador rolante no sensor de profundidade para fornecer a mais alta qualidade de profundidade. Além disso, o D415 integra um sensor RGB, ideal para autenticação facial, digitalização 3D ou captura volumétrica.
Seu tamanho físico é 99mmL×20mmW×23mmH, a faixa de profundidade é 0,5m-3m, o campo de visão é 65°×40°, a resolução de profundidade de saída pode chegar a 1280×720 e a taxa de quadros pode chegar a 90FPS ; D435i

fornece o campo de visão mais amplo de qualquer câmera Intel® RealSense™ e um obturador global no sensor de profundidade ideal para aplicativos de movimento rápido. O D435i oferece profundidade de alta qualidade para uma variedade de aplicações, e seu amplo campo de visão é ideal para aplicações como robótica ou realidade aumentada e virtual, onde ver o máximo possível da cena é essencial. Com um alcance de até 10 metros, esta pequena câmera pode ser facilmente integrada em qualquer solução e vem com Intel RealSense SDK 2.0 e suporte multiplataforma.
Seu tamanho físico é 90mmL×25mmW×25mmH, a faixa de alcance de profundidade é 0,3m-3m, o campo de visão é 87°×58°, a resolução de profundidade de saída pode chegar a 1280×720 e a taxa de quadros pode chegar a 90FPS ; Resolução RGB A resolução é 1920×1080, a taxa de quadros é 30FPS, o campo de visão é 69°×42° e a interface é USB‑C* 3.1 Gen 1*.

A D455 é o quarto produto da série D400, projetada com base no feedback e no conhecimento adquirido durante mais de 10 anos de desenvolvimento de câmeras estéreo. O D455 estende a distância entre os sensores de profundidade para 95 mm, melhorando assim o erro de profundidade para menos de 2% a 4 m. Para melhorar a imagem RGB e a correspondência entre a profundidade e as imagens RGB, o sensor RGB inclui um obturador global e corresponde ao FOV de profundidade. E a IMU é integrada, permitindo que os aplicativos otimizem sua percepção de profundidade em qualquer situação em que a câmera esteja em movimento.
Seu tamanho físico é de 124mmL×26mmW×29mmH, a faixa de profundidade é de 0,6m-6m, o campo de visão é de 87°×58°, a resolução de profundidade de saída pode chegar a 1280×720 e a taxa de quadros pode chegar a 90FPS ; Resolução RGB A resolução é 1280×800, a taxa de quadros é 30FPS, o campo de visão é 90°×65° e a interface é USB‑C* 3.1 Gen 1*.
3. Scanner HP 3D Pro S3
O HP 3D Scanner Pro S3 é o mais recente scanner 3D leve estruturado de ultra-alta precisão de nível industrial. Esta versão aprimorada otimiza a tecnologia de luz estruturada com um melhor método de processamento, levando em consideração diferentes condições e vários tamanhos de objetos digitalizados, mais fácil de ajustar o sistema de digitalização do que antes, este scanner é móvel e pode ser facilmente colocado na frente do objeto digitalizado, clique para iniciar a digitalização e um modelo 3D digital aparecerá na tela em alguns segundos, e a textura da superfície do objeto digitalizado pode ser capturada ao mesmo tempo, você pode digitalizar várias superfícies do objeto e, em seguida, Apresentando um modelo fechado de 360 graus, o modelo 3D pode ser exportado para formatos de arquivo 3D padrão (como OBJ, STL e PLY), compatível com a maioria dos softwares de design 3D do mercado.
O tipo de scanner é luz estruturada branca, a faixa de tamanho de digitalização é de 60 a 500 mm, a resolução/precisão é de cerca de 0,05% do tamanho real do objeto (até 0,05 mm) e o tempo de digitalização é de 2 segundos para uma única digitalização (ou até 10 segundos, depende da configuração e da velocidade do computador); a densidade da grade é de 2.300.000 vértices por varredura, e o arranjo e a costura podem ser equipados com costura automática da plataforma rotativa, costura automática de áreas sobrepostas, ângulo de rotação costura em torno do eixo Y e costura automática de áreas de pontos designadas Costura assistida por textura, etc.; formatos de arquivo de saída incluem OBJ, STL, PLY.
Seu tamanho físico é de 323 × 613 × 209 mm, usando luz estruturada, a resolução máxima é de 0,05 mm, a precisão máxima é de 0,05 mm, a velocidade de aquisição é de 2300000 pontos/s e a faixa de profundidade é de 0,06-0,5 m.

4. PrimeSense
A PrimeSense é uma empresa israelense de sensores 3D fundada em 2005. Em 2006, desenvolveu com sucesso um sensor 3D baseado no princípio da luz estruturada (este chip usa tecnologia de "codificação de luz" para criar cenas e usa luz quase IR (radiação infravermelha) e sensores CMOS (semicondutor de metal complementar) para interpretar o código de luz por trás da cena e, finalmente, usar algoritmos complexos para analisar os dados 3D.), o Kinect, produto de jogo somatossensorial da Microsoft lançado em 2009, usa o sensor 3D fornecido pela empresa. No final de 2010, a PrimeSense fez parceria com a Asus para desenvolver o Xtion Pro - que usa o mesmo sensor 3D do Kinect, mas só funciona em PCs. Em 2011, a PrimeSense fez parceria com a Willow Garage para criar a OpenNI, uma organização sem fins lucrativos destinada a "promover o desenvolvimento da comunidade de software de código aberto para aplicativos 3D". Em 2012, a PrimeSense lançou o Capri, o menor sensor 3D do mundo. Sua resolução é três vezes maior que a da geração anterior e seu tamanho é um décimo da geração anterior. O desempenho de detecção da luz ambiente é 50 vezes maior que a geração anterior .Pode trabalhar à luz do dia. O Capri pode ser incorporado em tablets, laptops, smartphones e monitores. No final, foi adquirido pela Apple por US$ 3,4 bilhões.
O sensor de câmera 3D de curto alcance PrimeSense Carmine 1.09 é usado para escaneamento de curto alcance, que pode escanear rostos, cabeças e objetos menores. Ele captura o movimento como um scanner Kinect baseado na tecnologia PrimeSense.
O sensor de profundidade PrimeSense 3D é uma solução de ponta a ponta que permite que os dispositivos percebam o mundo em 3D e traduzam essas percepções em imagens sincronizadas da mesma forma que as pessoas, aproveitando o poder da interação natural. A solução inclui um componente de sensor que entende as interações do usuário nesses ambientes. Um sensor de profundidade 3D vê e rastreia o movimento do usuário na cena. Toda a atividade do sensor é realizada sem fazer suposições sobre o usuário ou o ambiente. Não há necessidade de um dispositivo vestível, tornando a solução prática, conveniente, intuitiva e fácil de usar. O sensor inclui várias funções opcionais de entrada sensorial: imagem de profundidade (3D), imagem colorida (RGB) e áudio (o sensor possui 2 microfones). Todas as informações sensoriais (imagem de profundidade, imagem colorida e áudio) são transmitidas ao computador host por meio da interface USB 2.0 e possuem uma função completa de alinhamento de tempo.

Seu tamanho físico é de 18×2,5×3,5cm, o campo de visão é de 54°H×45°V, a resolução da imagem em profundidade é VGA, ou seja, 640×480, e a taxa máxima de quadros pode chegar a 60FPS (QVGA), 30FPS (VGA), a faixa de profundidade é de 0,35-3 m, a resolução RGB é de 1280 × 960 e adota a interface USB 2.0/3.0.
5. Visão do Louva-a-deus
A Mantis Vision é de Israel e tem se concentrado em tecnologia de luz estruturada de alta densidade, 3D e visão computacional há 15 anos. A Mantis Vision tem mais de 40 patentes autorizadas em tecnologias 3D, como luz estruturada e captura de vídeo volumétrica. Combinada com a experiência de algoritmos de software, a Mantis Vision alcançou a comercialização em muitos setores e cenários, incluindo pagamento financeiro, varejo de roupas, móveis domésticos personalizados, e pecuária Subdivisões verticais como agropecuária, cultura e entretenimento e transporte e logística.
O Mantis Vision F6 é um scanner 3D portátil, o F6 oferece excelente qualidade de dados com o fluxo de trabalho mais rápido, tornando-o o melhor dispositivo para digitalizar com precisão cenas complexas em segundos. Sem preparação de cena, sem alvos ou adesivos e fácil de usar. Os produtos da série F6 têm uma precisão de até 0,1 mm e uma resolução de profundidade de até 0,4 mm, a faixa de trabalho é de 0,2 m-4 m, o campo de visão é de 20 ° × 26 ° (mais próximo), 15 ° × 20 ° ( mais distante), quadro A taxa é de 8FPS e a taxa de aquisição de dados é de 640.000 pontos/s.

6. Xtion Pro
O Xtion PRO LIVE usa sensor infravermelho, tecnologia de detecção de profundidade adaptável, detecção de imagem colorida e streaming de áudio para capturar a imagem, movimento e voz do usuário em tempo real, tornando o rastreamento do usuário mais preciso. A solução de desenvolvimento Xtion PRO LIVE vem com um conjunto de ferramentas para desenvolvedores que facilitam a criação de seus próprios aplicativos baseados em gestos sem a necessidade de escrever algoritmos de programação complexos.

Seu tamanho físico é de 18 × 3,5 × 5 polegadas, o consumo de energia é inferior a 2,5 W, a faixa de profundidade é de 0,8 m-3,5 m, o campo de visão FOV é de 58 ° H × 45 ° V × 70 ° D e a profundidade a imagem é VGA (640 × 480), a taxa de quadros é 30FPS, a resolução da imagem de profundidade também pode ser QVGA (320 × 240), neste momento a taxa de quadros pode atingir 60FPS, a resolução RGB é 1280 × 1024 e a interface usa USB 2.0.
7. Zivid One+
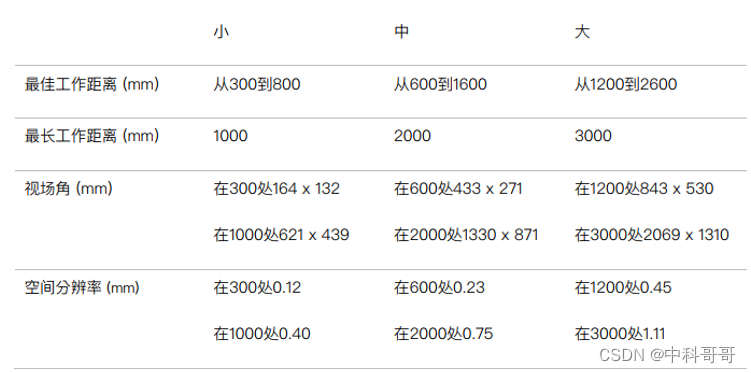
Zivid One+ Câmera colorida 3D de alta qualidade para sistemas de automação industrial e células robóticas com campo de visão pequeno/médio/grande flexível. Sua alta resolução e recursos RGB nativos podem garantir a alta exatidão e precisão da nuvem de pontos capturada. Capturando nuvens de pontos em 80 ms com tecnologia segura de luz branca estruturada para aplicações colaborativas. Com câmeras 3D do tipo S/M/L, é adequado para muitas distâncias e cenas de trabalho diferentes. O Zivid One+ 3D detecta alvos por meio de imagem de quadro único ou multiquadro e possui uma linha de base otimizada com características de baixa oclusão e uma ampla área de sobreposição de FOV. Um sensor de imagem de 2,3 MPixels é usado para adquirir cor RGB, dados 2D e 3D, permitindo que soluções automatizadas detectem, inspecionem, classifiquem, classifiquem e escolham objetos de interesse de forma confiável.
O tempo de ciclo é um elemento-chave da automação robótica eficiente. A câmera Zivid One+ suporta aquisição rápida de dados 3D e a velocidade de imagem de nuvem de ponto de cor mais rápida de 12FPS. A velocidade de imagem colorida 2D mais rápida pode atingir 50FPS.

A câmera 3D adota tecnologia de luz estruturada, a resolução RGB é de 1920 × 1200, a nuvem de pontos pode produzir 3D (XYZ) + cor (RGB) + contraste ©, o brilho do projetor é de 1/4x a 1,8x, 1x é igual a 400 lúmens, cada quadro da tela 3D tem 12 exposições, usando a interface USB 3.0, a distância de trabalho efetiva e o campo de visão de cada modelo são os seguintes.
8. optônico
O ensneso da optonic é pioneiro na tecnologia de sensores 3D industriais e abre novas possibilidades no campo de posicionamento e medição em plantas industriais.
O tamanho físico da câmera N35-606-16-BL é de 175 × 50 × 52 mm, a resolução 3D é de 1280 × 1024, a resolução RGB é de 1280 × 1024, a taxa de quadros é de 10 FPS e o campo de visão é de 58 ° H×52°V, a interface é interface GigE Ethernet e suporta driver PCL/ROS.

9. Escolhas
Pickit é um sistema de visão 3D para orientação de robôs. O Pickit M-HD é um sistema de visão 3D de alta precisão e alto desempenho, mais adequado para selecionar objetos pequenos e médios de mesas, caixas e caixas com alta precisão (tamanho mínimo do objeto: 10 × 10 × 5 mm) Perfeito para quase qualquer aplicação de separação. Recursos do Pickit:
coleta altamente precisa - a melhor câmera da categoria;
instalação e configuração que economizam tempo - conecte e comece a coletar em horas;
automação altamente flexível - possui a melhor interface de usuário da categoria para adaptação rápida E complete o conversão;
livrar-se de acessórios volumosos e que consomem espaço - Pickit pode encontrar peças em qualquer posição e cena;
velocidade de produção segura - o ciclo de inspeção é inferior a um segundo e pode encontrar várias peças em um ciclo;
Corte custos com preços fixos - off -os produtos de prateleira já são bem usados em mais de 150 aplicações em mais de 40 países e têm o ROI mais rápido do mercado; menos preocupação com confiabilidade
24 horas por dia, 7 dias por semana - Pickit oferece o ano todo Trabalho ininterrupto de alta qualidade, software Pickit ainda permite que você siga o robô através de seus olhos a qualquer hora, em qualquer lugar.

Ele usa luz estruturada para medição 3D, o tempo de captura da imagem 3D é 200-1000ms, a resolução da câmera 3D é 1920×1200, a precisão é 0,15-0,8 mm e a interface é a interface USB 3.0.
3.10 Photoneo
é baseado em uma tecnologia inovadora de luz estruturada paralela. A câmera Photoneo® 3D tem as características de alta precisão, alta precisão, velocidade de digitalização rápida, etc., e pode capturar objetos em movimento. Um dispositivo de projeção a laser emite um conjunto de padrões e uma câmera captura a área digitalizada. Em seguida, a posição precisa de cada ponto visível do objeto é calculada por algoritmo. Esta tecnologia não é afetada pela textura e material do objeto, desde que o objeto possa refletir a luz, ele pode atender aos requisitos de digitalização. Ao mesmo tempo, o sistema de grade estruturada também determina a qualidade e a velocidade de digitalização da reconstrução 3D. Na ausência de luz solar direta e objetos não reflexivos, a uma distância de trabalho de 1,5 metros, pode fornecer pelo menos 5 fps de digitalização da área de digitalização.
A Photoneo MotionCam-3D é a câmera 3D de maior resolução e precisão do mundo para cenas dinâmicas. É o dispositivo de escolha para aplicações que requerem aquisição 3D rápida e poderosa. Reconstrua nuvens de pontos precisos de vários objetos em altos níveis de detalhe sem comprometer a qualidade devido à vibração, luz ambiente ou desfoque de movimento. Ele usa a tecnologia de luz estruturada paralela, que traz a qualidade e a resolução avançadas da varredura de luz estruturada para a reconstrução 3D de cenas altamente dinâmicas. Essa nova tecnologia patenteada usa um design de sensor engenhoso para realizar a aquisição em um único instantâneo, em vez das varreduras sequenciais de sensores de imagem padrão. Isso significa que a abordagem de luz estruturada paralela pode, na verdade, congelar a cena 3D no tempo.

O alcance da varredura da câmera da série S é de 366-558 mm, o tamanho do ponto é de 0,37 mm@z=442 mm, a precisão é <0,300 mm e o ruído temporal é <0,100 mm; o tamanho do ponto do scanner é de 0,25 mm@ z = 442 mm e a precisão é <0,150 mm, ruído de tempo <0,050 mm; a resolução do mapa de profundidade é de 1680 × 1200 no modo estático, 1120 × 800 no modo dinâmico, o tempo de aquisição de dados é de 10 ms, a taxa de transferência do ponto 3D é de 15 milhões de pontos por em segundo lugar, o tamanho físico é 80 × 68 x 307 mm com uma linha de base de 230 mm.
11. Orbi Zhongguang Astra+
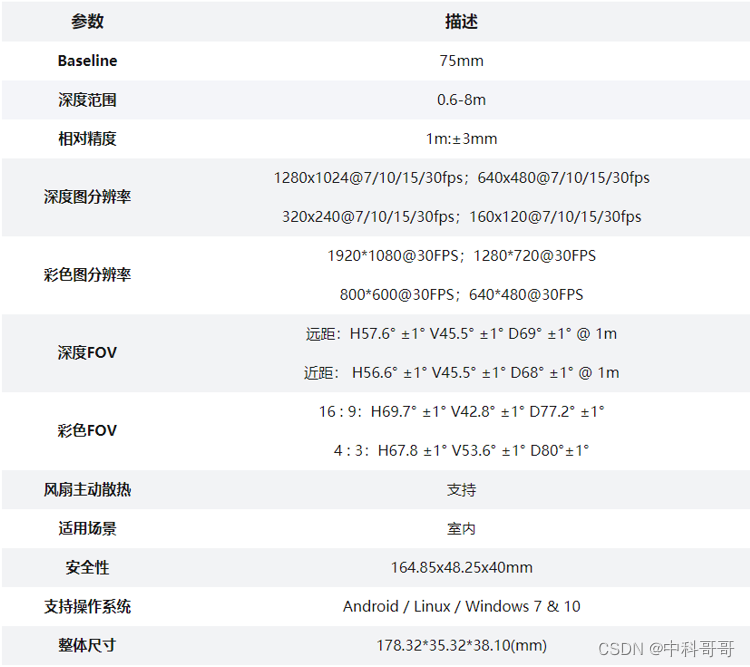
Astra+ é um novo produto atualizado da série Orbi Zhongguang Astra, e o invólucro adota um design destacável e modular. Com um sistema de resfriamento ativo inteligente exclusivo, ele ainda pode produzir imagens de profundidade de alta qualidade de forma estável em ambientes hostis.
A interface é atualizada para USB 3.0, que pode fornecer maior largura de banda. O USB Type-C possui uma interface de bloqueio, que é conveniente e estável para conectar; a base adota um design de interface de tripé padrão e os clientes podem configurar diferentes formas de bases de forma flexível para uso fixo conveniente. Seu princípio de medição adota tecnologia de luz estruturada 3D.

Suas especificações são as seguintes: