虚拟机上安装Ubuntu及ROS
使用的虚拟机 VMware为15.x的版本
Ubuntu的版本为16.04的版本
Ubuntu的安装
- 安装好虚拟机VMware
- 下载 Ubuntu-16.04.7-desktop-amd64 镜像源
官网:https://releases.ubuntu.com/16.04/
官方镜像源:点击下载官方镜像源
阿里云镜像源:点击下载阿里云镜像源
该文档的PDF:下载
- 安装Ubuntu-16.04.7-desktop-amd64
选择自定义,点击下一步

点击下一步

选择“稍后安装操作系统”,点击下一步

选择“Linux”,版本选择“Ubuntu 64位”,点击下一步

选择该虚拟机的安装位置,点击下一步

根据自己的电脑,选择相应的配置,建议不低于2核2G内存


这里选择NAT即可。(安装好Ubuntu之后,选择右上角,点击“自动以太网”即可)

这里选择默认推荐的即可,点击下一步


如图,点击下一步


选择好磁盘文件存储的位置之后,点击下一步,即可看到大致的配置信息,点击完成


点击完成后,点击该虚拟机的CD/DVD

- 选择CD/DVD(SATA),选择“使用ISO映像文件”,选择上一步骤下载的镜像源
- 同时您还可以把“打印机”移除
- 设置好之后,点击确定
- 点击 开启此虚拟机

拉到最下面,选择中文(简体)
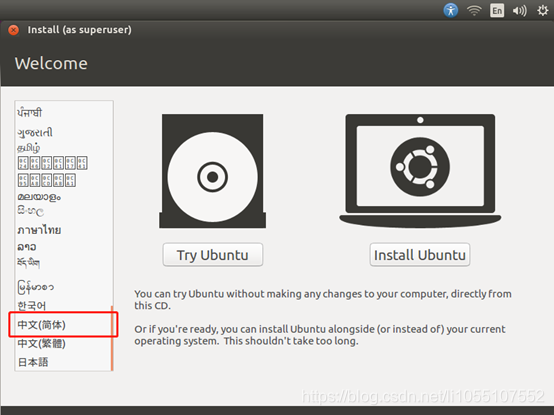
点击“安装Ubuntu”

不做选择,点击“继续”

选择“清除整个磁盘并安装Ubuntu”,点击现在安装

弹出提示,点击继续

时间选择shanghai即可,点击继续

选择“汉语-汉语”,点击继续

设置好用户名以及密码,点击继续

- 稍等片刻,即可安装完成
- 安装完毕,点击现在重启。(若出现一行命令行后没反应,关闭虚拟机重启)


现在已经安装好Ubuntu了,登录刚刚设置的密码即可。

成功进入到Ubuntu主界面,您可以把这几项从启动器解锁


打开第一项的搜索,打开终端
打开一个终端,并锁定到启动器

运行终端,输入su命令,当你输入刚才登录的密码时发现su:认证失败。
你可以输入 $ sudo passwd root 更新密码(可以与原来相同)
设置完成后,在此输入su,输入密码即可认证成功。

接下来打开 设置—系统 软件和更新,如图设置好即可。

届时,你的Ubuntu 已经完全配置好了。
ROS的安装
- 首先添加ROS的镜像源(此处使用‘中国科学技术大学’的镜像源)
$ sudo sh –c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
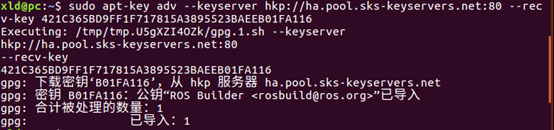
- 添加密钥
$ sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
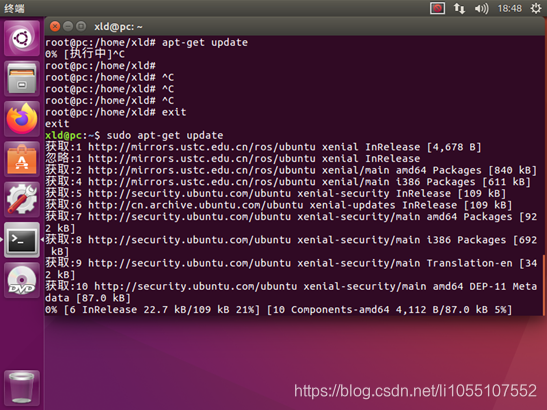
- 更新软件源
$ sudo apt-get update
接下来就是漫长的等待… …(有条件的可以连个VPN,会快很多)
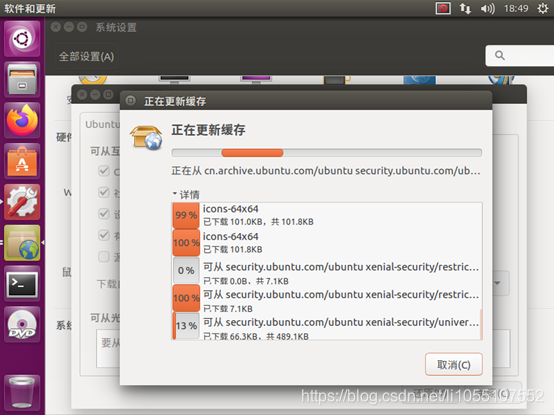
若上方的 ’ $ sudo apt-get update ’ 更新失败了,
可以打开“设置-系统 软件和更新”,随意勾选一项 然后提示输入密码,接着再还原勾选的选项 点击“关闭”,即会提示以下信息
保证联网后,点击重新载入 便会出现如下界面。只需等待自动更新即可。

- 安装ROS桌面完整版
执行完上面的步骤后,执行命令安装ROS的桌面完整版
$ sudo apt-get install ros-kinetic-desktop-full
可能有包无法下载,所以执行完之后,输入命令
$ sudo apt-get install ros-kinetic-desktop-full –fix-missing
将检查是否有漏的包,并且自动进行相关的设置

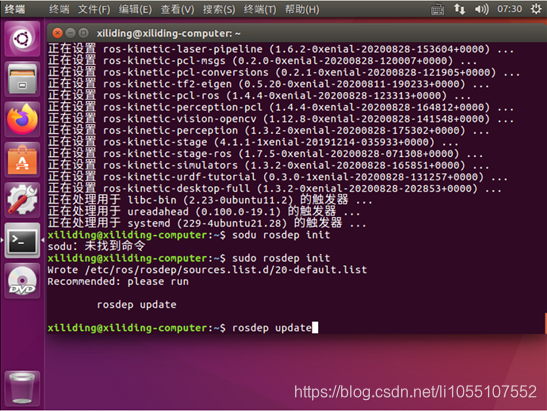
- 初始化rosdep
$ sudo rosdep init
$ rosdep update

- 设置环境变量
(默认)终端为bash的:
$ echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
$ source ~/.bashrc
zsh终端的:
$ echo "source /opt/ros/kinetic/setup.zsh" >> ~/.zshrc
$ source ~/.zshrc
若不知道自己是什么终端的,可以输入
$ env查看

- (选)你还可以安装 rosinsall ROS中的一个常用工具,来便于后续的开发
$ sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
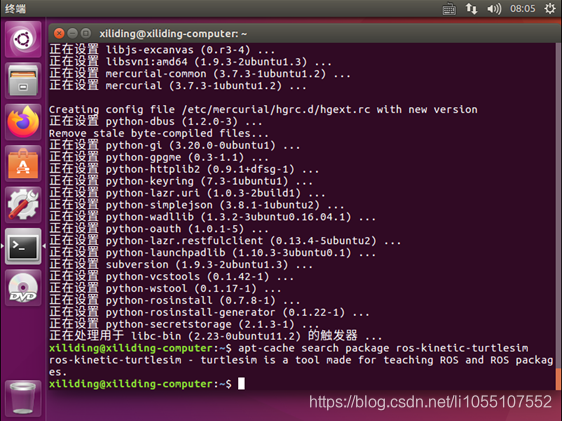
附:$ apt-cache search package 可以用来查询是否已经安装某个package
到此,ROS 也已经安装完成了。
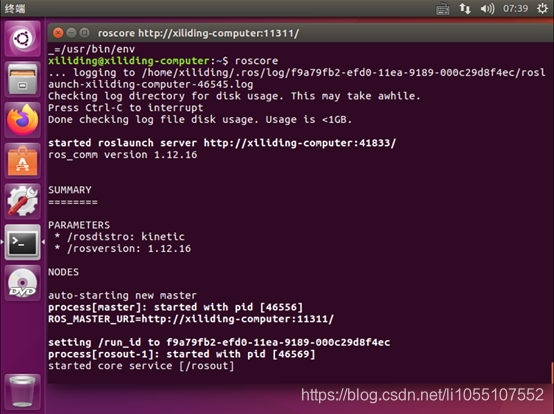
输入 $ roscore 即可启动ROS了
运行小海龟
- 启动ROS。先打开一个终端,然后输入命令:
$ roscore
- 启动turtlesim仿真节点。再打开一个终端,输入命令:
$ rosrun turtlesim turtlesim_node
- 再打开一个终端,使得可以用键盘上的方向键操控小乌龟:
$ rosrun turtlesim turtle_teleop_key

到此,你的ROS已经能够正常运行啦!
开始进阶学习吧~