Algoritmo de controle do motor BLDC O
motor sem escova é um autoconversor (conversão de autodireção), por isso é mais complicado de controlar.
O controle do motor BLDC requer uma compreensão da posição do rotor e do mecanismo do motor para retificação e direção. Para o controle de velocidade em malha fechada, existem dois requisitos adicionais, a saber, a medição da velocidade do rotor e / ou corrente do motor e o sinal PWM para controlar a potência da velocidade do motor.
Os motores BLDC podem usar sinais PWM alinhados ao lado ou alinhados ao centro, de acordo com os requisitos da aplicação. A maioria das aplicações requer apenas operação de mudança de velocidade e utilizará seis sinais PWM independentes alinhados lateralmente. Isso fornece a mais alta resolução. Se o aplicativo exigir posicionamento do servidor, frenagem por consumo de energia ou inversão de potência, é recomendável usar um arranjo central suplementar de sinais PWM.
Para detectar a posição do rotor, os motores BLDC usam sensores de efeito Hall para fornecer uma detecção de posicionamento absoluta. Isso leva ao uso de mais linhas e custos mais altos. O controle BLDC sem sensor elimina a necessidade de sensores Hall, mas usa o EMF traseiro (força eletromotriz) do motor para prever a posição do rotor. O controle sem sensor é essencial para aplicações de velocidade variável de baixo custo, como ventiladores e bombas. Ao adotar o motor BLDC, o refrigerador e o compressor do ar condicionado também precisam de controle sem sensor.
Inserção e reabastecimento de zona morta
Muitos algoritmos de controle diferentes são usados para fornecer controle de motores BLDC. Normalmente, os transistores de potência são usados como reguladores lineares para controlar a tensão do motor. Este método não é prático ao dirigir motores de alta potência. Os motores de alta potência devem usar o controle PWM e exigir um microcontrolador para fornecer as funções de partida e controle.
O algoritmo de controle deve fornecer as três funções a seguir:
Tensão PWM para controlar a velocidade do motor
· Mecanismo de comutação do motor
· Método para prever a posição do rotor usando força eletromotriz traseira ou sensor Hall
A modulação por largura de pulso é usada apenas para aplicar tensão variável aos enrolamentos do motor. A tensão efetiva é proporcional ao ciclo de trabalho PWM. Quando a comutação adequada é obtida, as características de torque e velocidade do BLDC são as mesmas dos motores CC. A tensão variável pode ser usada para controlar a velocidade e o torque variável do motor.
A comutação dos transistores de potência alcança o enrolamento adequado no estator, o que gera o melhor torque com base na posição do rotor. Em um motor BLDC, o MCU deve conhecer a posição do rotor e poder comutar no momento certo.
Comutação trapezoidal do motor BLDC
Um dos métodos mais simples para motores CC sem escova é usar a chamada comutação trapezoidal.
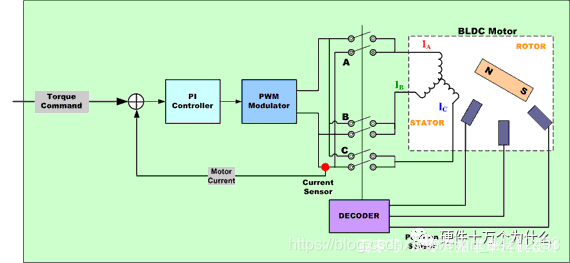
Figura 1: Diagrama de blocos simplificado de um controlador de escada para motores BLDC
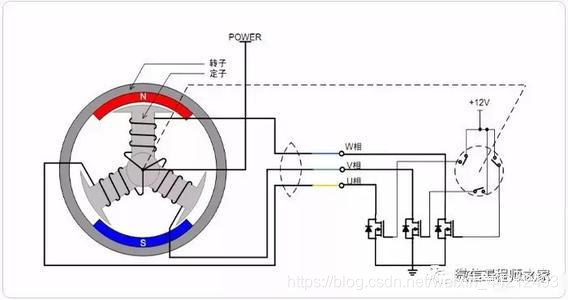
Neste esquema, cada vez que um par de terminais do motor é usado para controlar a corrente, e o terceiro terminal do motor é sempre desconectado eletronicamente da fonte de alimentação.
Três dispositivos Hall embutidos no motor grande são usados para fornecer sinais digitais, medem a posição do rotor em um setor de 60 graus e fornecem essas informações no controlador do motor. Como a quantidade de corrente nos dois enrolamentos é igual a cada vez e a corrente no terceiro enrolamento é zero, esse método pode gerar apenas um vetor espacial atual com uma das seis direções. Com o giro do motor, a corrente elétrica do terminal do motor é comutada uma vez a 60 graus por rotação (comutação de retificação), para que o vetor de espaço atual esteja sempre na posição mais próxima de 30 graus com uma mudança de fase de 90 graus.

Portanto, a forma de onda atual de cada enrolamento é trapezoidal, começando de zero para corrente positiva para zero e depois para corrente negativa.
Isso cria um vetor espacial atual e, quando ele avança em seis direções diferentes, à medida que o rotor gira, ele se aproxima da rotação de equilíbrio.
Em aplicações de motores como ar condicionado e geadas, o uso de sensores Hall não é uma escolha constante. Sensores back-EMF induzidos em enrolamentos sem acoplamento podem ser usados para obter o mesmo resultado.
Esse tipo de sistema de acionamento trapezoidal é muito comum devido à simplicidade de seu circuito de controle, mas eles encontram problemas de oscilação de torque durante o processo de retificação.
Comutação sinusoidal do motor BDLC
A comutação trapezoidal não é suficiente para fornecer um controle de motor CC sem escovas equilibrado e preciso. Isso ocorre principalmente porque o torque gerado em um motor sem escova trifásico (com um EMF de onda regular) é definido pela seguinte equação:
O controlador sem escova do motor de comutação sinusoidal se esforça para acionar três enrolamentos do motor, e sua corrente de três vias muda suavemente sinusoidalmente à medida que o motor gira. As fases relativas dessas correntes são selecionadas para produzir um vetor de espaço de corrente do rotor estável, a direção é ortogonal ao rotor e possui invariância. Isso elimina a oscilação do torque e os pulsos de direção associados à direção em forma de norte.
Para gerar uma modulação suave da onda senoidal da corrente do motor à medida que o motor gira, é necessária uma medição precisa da posição do rotor. O dispositivo Hall apenas fornece um cálculo aproximado da posição do rotor, o que não é suficiente para atender aos requisitos. Por esse motivo, é necessário feedback angular de codificadores ou dispositivos similares.
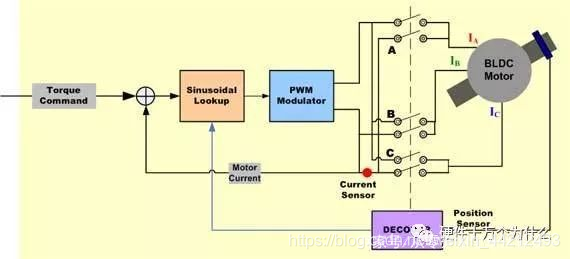
Como as correntes do enrolamento devem ser combinadas para produzir um vetor espacial atual estável do rotor constante, e cada posição dos enrolamentos do estator está afastada a 120 graus, a corrente em cada grupo de linhas deve ser sinusoidal e a mudança de fase é de 120 graus. As informações de posição no codificador são usadas para sintetizar as duas ondas senoidais e a mudança de fase entre as duas é de 120 graus. Então, esses sinais são multiplicados pelo comando de torque, de modo que a amplitude da onda senoidal é proporcional ao torque necessário. Como resultado, os dois comandos de corrente de onda senoidal são adequadamente fasados, resultando em um vetor de espaço de corrente do estator em rotação na direção ortogonal.
O sinal de comando de corrente senoidal emite um par de controladores PI que modulam a corrente em dois enrolamentos de motor adequados. A corrente no terceiro enrolamento do rotor é a soma negativa da corrente de enrolamento controlada e, portanto, não pode ser controlada separadamente. A saída de cada controlador PI é enviada para um modulador PWM e, em seguida, para a ponte de saída e os dois terminais do motor. A tensão aplicada ao terceiro terminal do motor é derivada da soma negativa dos sinais aplicados aos dois primeiros grupos de fios e é adequadamente utilizada para três tensões sinusoidais separadas por 120 graus.
Como resultado, a forma de onda da corrente de saída real rastreia com precisão o sinal de comando da corrente senoidal, o vetor espacial da corrente resultante gira suavemente, é quantitativamente estabilizado e é posicionado na direção desejada.
Geralmente, a direção de retificação trapezoidal não pode alcançar o resultado estável da direção de retificação senoidal de controle. No entanto, devido à sua alta eficiência em baixas velocidades do motor, ele se separará em altas velocidades do motor. Isso ocorre devido ao aumento da velocidade e o controlador de retorno atual deve rastrear um sinal sinusoidal de frequência crescente. Ao mesmo tempo, eles devem superar a EMF traseira do motor com amplitude e frequência crescentes à medida que a velocidade aumenta.
Como o controlador PI possui resposta limitada de ganho e frequência, a perturbação da variável de tempo no circuito de controle de corrente causará atraso de fase e erro de ganho na corrente do motor.Quanto maior a velocidade, maior o erro. Isso perturbará a direção do vetor espacial atual em relação ao rotor, causando deslocamento na direção ortogonal.
Quando isso acontece, uma quantidade menor de torque pode ser gerada por uma certa quantidade de corrente; portanto, é necessária mais corrente para manter o torque e a eficiência é reduzida. À medida que a velocidade aumenta, essa diminuição continuará. Até certo ponto, a mudança de fase da corrente excede 90 graus. Quando isso acontece, o torque é reduzido a zero. Através da combinação de sinusóides, a velocidade nesse ponto leva a um torque negativo, portanto não pode ser alcançada.
