Aprendizagem PCL da biblioteca de nuvem de pontos: descrição e extração de recursos (FPFH)
Descritor de histograma de recurso de ponto rápido (FPFH)
Sabendo que existem n pontos na nuvem de pontos P, a complexidade teórica do cálculo do histograma de feições pontuais (PFH) é (Onk2), onde k é a vizinhança considerada ao calcular o vetor de feições para cada ponto p na nuvem de pontos P Quantidade. Para aplicativos em tempo real ou quase em tempo real, o cálculo dos histogramas de recurso de ponto (PFH) de nuvens densas de ponto é um grande gargalo de desempenho. Aqui está uma forma simplificada do método de cálculo do PFH, chamado FPFH (Fast Point Feature Histograms). O FPFH reduz a complexidade computacional para (Onk), mas ainda mantém a maioria dos recursos do PFH.
A diferença entre PFH e FPFH
As principais diferenças entre os métodos de cálculo PFH e FPFH estão resumidas a seguir:
- O FPFH não conta os parâmetros de cálculo de todos os pontos vizinhos do ponto totalmente interconectado, como pode ser visto na figura; portanto, alguns pares de pontos importantes podem ser perdidos e esses pares ausentes podem capturar a geometria em torno do ponto de consulta Recursos contribuem.
- O modelo de recurso PFH é um raio de vizinhança preciso em torno do ponto de consulta e o FPFH também inclui pares de pontos adicionais fora do raio r (mas dentro de 2r)
- Por causa da maneira de calcular novamente o peso, o FPFH combinado ao valor do SPFH captura novamente as informações geométricas dos pares de pontos importantes adjacentes;
- Como a complexidade geral do FPFH é bastante reduzida, o FPFH pode ser usado em aplicativos em tempo real;
- Ao decompor o trigêmeo, o histograma sintetizado é simplificado. Ou seja, simplesmente gere histogramas de recurso separados, desenhe cada dimensão de recurso separadamente e conecte-os.
Estimativa do descritor FPFH
#include <vtkAutoInit.h>
VTK_MODULE_INIT(vtkRenderingOpenGL);
VTK_MODULE_INIT(vtkInteractionStyle);
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/common/io.h>
#include <pcl/features/normal_3d.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/console/time.h>
#include <pcl/features/fpfh.h> //FPFH
#include <pcl/visualization/pcl_plotter.h>//显示描述子
using namespace pcl;
int main(int argc, char **argv)
{
//读取点云
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
if (pcl::io::loadPCDFile<pcl::PointXYZ>("steelCoil.pcd", *cloud) == -1)
{
PCL_ERROR("Cloudn't read file!");
system("pause");
return -1;
}
//估计法线
pcl::NormalEstimation<pcl::PointXYZ, pcl::Normal> ne;
ne.setInputCloud(cloud);
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>());
ne.setSearchMethod(tree);
pcl::PointCloud<pcl::Normal>::Ptr cloud_normals(new pcl::PointCloud<pcl::Normal>);
ne.setRadiusSearch(0.6); //使用半径在查询点周围0.6范围内的所有邻元素
ne.compute(*cloud_normals); //计算法线
//PHFH
pcl::FPFHEstimation<pcl::PointXYZ, pcl::Normal, pcl::FPFHSignature33> fpfh;
fpfh.setInputCloud(cloud);
fpfh.setInputNormals(cloud_normals);
pcl::search::KdTree<PointXYZ>::Ptr tree1(new pcl::search::KdTree<pcl::PointXYZ>);//创建一个空的kd树表示法
fpfh.setSearchMethod(tree1);//输出的数据集
pcl::PointCloud<pcl::FPFHSignature33>::Ptr fpfhs(new pcl::PointCloud<pcl::FPFHSignature33>());
//使用半径内0.8里面范围所有元素
fpfh.setRadiusSearch(0.8);//使用半径必须大于估计法线时使用的半径
fpfh.compute(*fpfhs);
//显示某点的fhfh特征
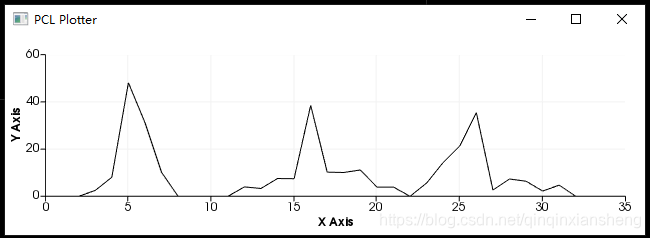
pcl::visualization::PCLPlotter plotter;
plotter.addFeatureHistogram<pcl::FPFHSignature33>(*fpfhs,"fpfh", 60);
//可视化
pcl::visualization::PCLVisualizer viewer("PCL Viewer");
viewer.setBackgroundColor(0.0, 0.0, 0.0);
viewer.addPointCloudNormals<pcl::PointXYZ,pcl::Normal>(cloud, cloud_normals, 1, 0.4, "normals");
viewer.addPointCloud(cloud,"cloud1");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE,2, "cloud1");
while (!viewer.wasStopped())
{
plotter.plot();
viewer.spinOnce(100);
}
return 0;
}Resultados estimados
Conforme mostrado na figura, o FPFH contém 33 dados