Extraia a menor caixa delimitadora (AABB, OBB)
Introdução à caixa delimitadora mínima
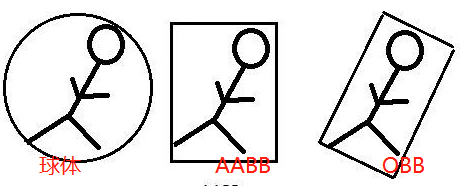
A caixa delimitadora também é chamada de retângulo mínimo circunscrito. É um algoritmo para resolver o espaço delimitador ideal do conjunto de pontos discretos. A idéia básica é usar um volume um pouco maior e uma geometria mais simples (chamada de caixa delimitadora) para substituir aproximadamente objetos geométricos complexos.
Os algoritmos comuns de caixa delimitadora incluem caixa delimitadora AABB, esfera delimitadora, caixa delimitadora direcional OBB e casco convexo de direção fixa FDH. O problema da detecção de colisões tem uma ampla gama de aplicações nos campos da realidade virtual, design e fabricação auxiliados por computador, jogos e robôs, e até se torna uma tecnologia essencial. O algoritmo da caixa delimitadora é um dos métodos importantes para a detecção preliminar de interferência de colisão.
Extração de caixas delimitadoras AABB e OBB
#include <vtkAutoInit.h>
VTK_MODULE_INIT(vtkRenderingOpenGL);
VTK_MODULE_INIT(vtkInteractionStyle);
#include <pcl/features/moment_of_inertia_estimation.h>
#include <vector>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/visualization/cloud_viewer.h>
#include <boost/thread/thread.hpp>
#include <pcl/visualization/cloud_viewer.h>
int main(int argc, char** argv)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>());
if (pcl::io::loadPCDFile("test.pcd", *cloud) == -1)
{
PCL_ERROR("Cloudn't read file!");
system("pause");
return -1;
}
pcl::MomentOfInertiaEstimation <pcl::PointXYZ> feature_extractor;
feature_extractor.setInputCloud(cloud);
feature_extractor.compute();
std::vector <float> moment_of_inertia;
std::vector <float> eccentricity;
pcl::PointXYZ min_point_AABB;
pcl::PointXYZ max_point_AABB;
pcl::PointXYZ min_point_OBB;
pcl::PointXYZ max_point_OBB;
pcl::PointXYZ position_OBB;
Eigen::Matrix3f rotational_matrix_OBB;
float major_value, middle_value, minor_value;
Eigen::Vector3f major_vector, middle_vector, minor_vector;
Eigen::Vector3f mass_center;
feature_extractor.getMomentOfInertia(moment_of_inertia);
feature_extractor.getEccentricity(eccentricity);
feature_extractor.getAABB(min_point_AABB,max_point_AABB);
feature_extractor.getOBB(min_point_OBB,max_point_OBB, position_OBB, rotational_matrix_OBB);
feature_extractor.getEigenValues(major_value,middle_value, minor_value);
feature_extractor.getEigenVectors(major_vector,middle_vector, minor_vector);
feature_extractor.getMassCenter(mass_center);
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("3D Viewer"));
viewer->setBackgroundColor(1,1, 1);
viewer->addCoordinateSystem(1.0);
viewer->initCameraParameters();
viewer->addPointCloud<pcl::PointXYZ>(cloud,pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ>(cloud, 0,255, 0), "sample cloud");
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE,
5, "sample cloud");
viewer->addCube(min_point_AABB.x,max_point_AABB.x,min_point_AABB.y,max_point_AABB.y,min_point_AABB.z,max_point_AABB.z, 1.0, 0.0, 0.0, "AABB");
viewer->setShapeRenderingProperties(pcl::visualization::PCL_VISUALIZER_OPACITY,
0.1, "AABB");
viewer->setShapeRenderingProperties(pcl::visualization::PCL_VISUALIZER_LINE_WIDTH,
4, "AABB");
Eigen::Vector3f position(position_OBB.x, position_OBB.y, position_OBB.z);
std::cout<< "position_OBB: " << position_OBB << endl;
std::cout<< "mass_center: " << mass_center << endl;
Eigen::Quaternionf quat(rotational_matrix_OBB);
viewer->addCube(position,quat, max_point_OBB.x - min_point_OBB.x, max_point_OBB.y - min_point_OBB.y,max_point_OBB.z - min_point_OBB.z, "OBB");
viewer->setShapeRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR,
0, 0, 1, "OBB");
viewer->setShapeRenderingProperties(pcl::visualization::PCL_VISUALIZER_OPACITY,
0.1, "OBB");
viewer>setShapeRenderingProperties(pcl::visualization::PCL_VISUALIZER_LINE_WIDTH,
4, "OBB");
viewer->setRepresentationToWireframeForAllActors();
pcl::PointXYZ center(mass_center(0), mass_center(1), mass_center(2));
pcl::PointXYZ x_axis(major_vector(0) + mass_center(0), major_vector(1) + mass_center(1), major_vector(2) + mass_center(2));
pcl::PointXYZ y_axis(middle_vector(0) + mass_center(0), middle_vector(1) +mass_center(1),middle_vector(2) + mass_center(2));
pcl::PointXYZ z_axis(minor_vector(0) + mass_center(0), minor_vector(1) +mass_center(1),minor_vector(2) + mass_center(2));
viewer->addLine(center,x_axis, 1.0f, 0.0f, 0.0f, "major eigen vector");
viewer->addLine(center,y_axis, 0.0f, 1.0f, 0.0f, "middle eigen vector");
viewer->addLine(center,z_axis, 0.0f, 0.0f, 1.0f, "minor eigen vector");
std::cout<< "size of cloud :" << cloud->points.size() <<endl;
std::cout << "moment_of_inertia :" << moment_of_inertia.size() << endl;
std::cout<< "eccentricity :" << eccentricity.size() << endl;
viewer->setCameraPosition(0,0, 0, 0, 156, -20, 0, 0, 1, 0);//设置相机位置,焦点,方向
while (!viewer->wasStopped())
{
viewer->spinOnce(100);
boost::this_thread::sleep(boost::posix_time::microseconds(100000));
}
system("pause");
return (0);
}Extrair resultados

