このチュートリアルでは、使用されるシステムがある、ROSをインストールする方法を実証することであるUbuntuの18.04。
次の三つの部分:
- aptのソースを変更します
- 公式サイト特定のインストールのチュートリアルROSをフォロー
- インストールが成功したかどうかをテスト
1.変更のaptソース
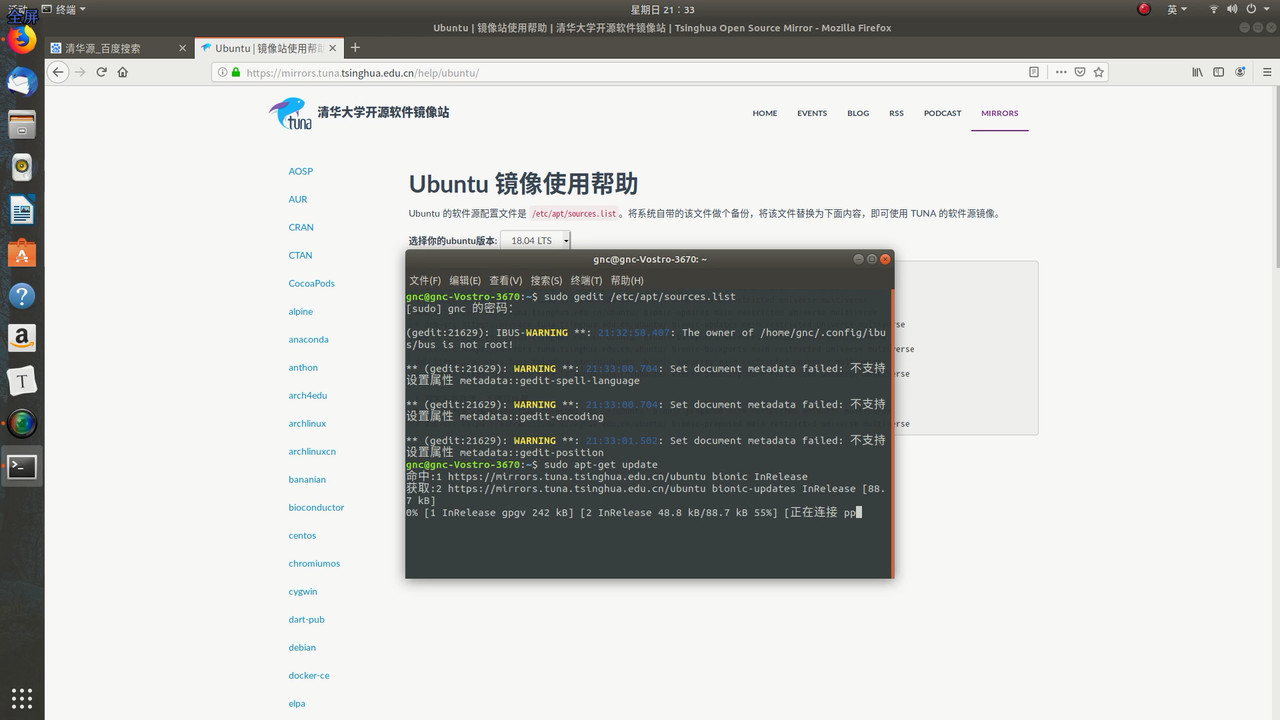
Baiduは検索清華ソースを、その後の右下隅をクリックし、使用のヘルプを見つけるために、下へ、そしてパドルのUbuntuを、今回のページが表示されます。

その後、我々は、プレスをテキスト編集ボックスにコピーされますCtrl+Alt+T端末での端末と種類を開くためにsudo gedit /etc/apt/sources.list開くためにsources.list、ファイルをファイルの内容を削除し、ちょうどで貼り付けの内容をコピーし、端末内に入力しますsudo apt-get update。
2.公式サイト特定のインストールのチュートリアルROSをフォロー
その後、我々はオープンROSのインストールのチュートリアルを、選択したUbuntuページがロードされた後に待機し、インストールを完了するための手順に従うことができます。
ステップ1.1
私は、1.1の手順を行いませんが、また、最終的なインストールは成功しました。
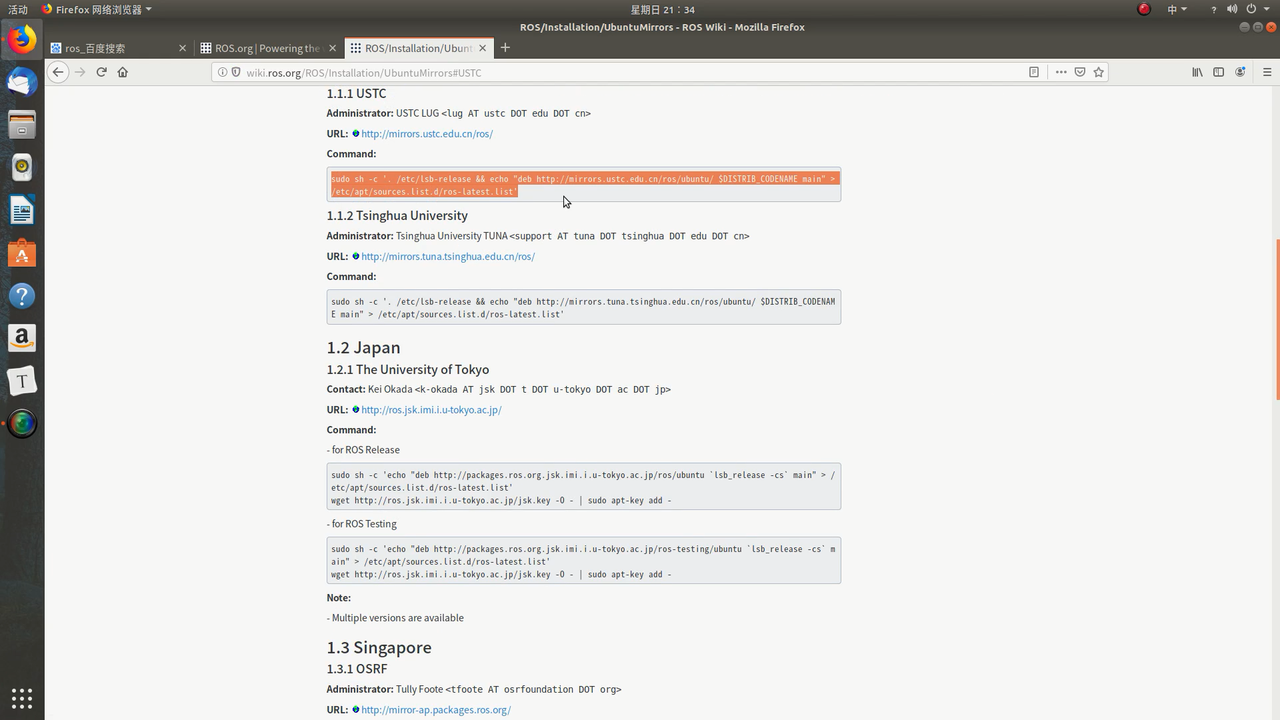
ステップ1.2
このステップでは、あなたはをクリックしMirror、リンクの更新が遅すぎる防ぐために、入力した後、国内のソースを選択します。私はUSTCにこのソースを選びました。
1.7ステップ1.3
ステップ1.2を完了した後、1.3〜1.7の手順では、ページの案内に従って完了する必要があるが、ので、それが可能であることに注意のためのネットワーク上の理由遅い更新、あなたが使用して試すことができ、携帯電話ホットスポットを改善すること。
インストールが成功したかどうかをテスト3
他の問題なので、通常は、あなたが成功したROSをインストールしていない場合は1.1〜1.7の手順を完了した後、のは、ROSのインストールが成功したかどうかをテストするための簡単なプログラムを実行してみましょう。
入力端子の端子を開きroscore、メインコマンド文は、コアプログラムROS開始することです。

次に、新しい端末入力rosrun turtle_sim turtlesim_node。
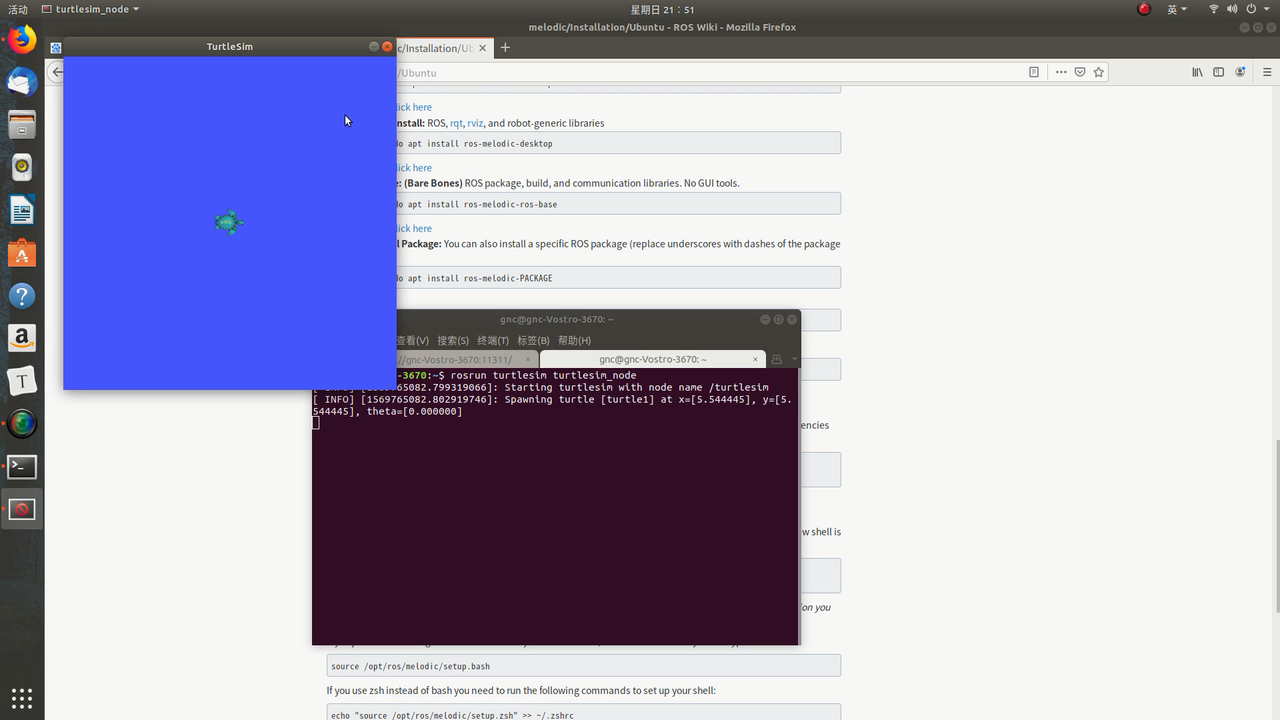
成功した場合は、ポップアップウィンドウの上。あなたにおめでとうございます!あなたがROSを正常にインストールされていることを証明します。
ビデオ
インストールプロセスの上に私はあなたが理解していないテキストを見れば、あなたが輝く動画にインストールすることができ、映像を記録しました。