まず、アルゴリズムは思いました
A *アルゴリズムは、アルゴリズムのコスト関数であるF(N)= G(N )+ H(n)は、いくつかの制限が与えられて得られた発見的探索アルゴリズム
ノードを介して結合した最初のノードS0から始まると仮定するのF *(n)は、nは、最小コストのSG宛先ノードに到達し、評価関数F(n)はF *の推定値である(N)です。思い出します
- F *(N)は、G *(N)+ H *を(N)=
ここで、G×(N)S0は、nの到着から最小のコストで、H *は、(N)SGに対して最小のコストであり、n。
制限は、以下のアルゴリズムA Gの(グローバル好ましい)(n)及びH(n)が行われた場合。
- G(n)は、最小コストのG *(n)が推定され、及びG(N)> 0です。
- H(n)は、最小のコストさh *(n)が低い、すなわち、結合した任意のノードのN有するH(N)≤h×(N)です。
呼ばれる方法は、上記2つのA *アルゴリズムを満たすように制限しました。
第二に、それはA *アルゴリズムの満足することができます
図検索アルゴリズムは常にステップの有限数内の宛先ノードへの最初のノードから最適経路を見つけることができる場合、宛先ノードは、存在する経路を有する最初のノードから任意の状態のための空間と、このパス検索アルゴリズムの端に採用されると言われています。
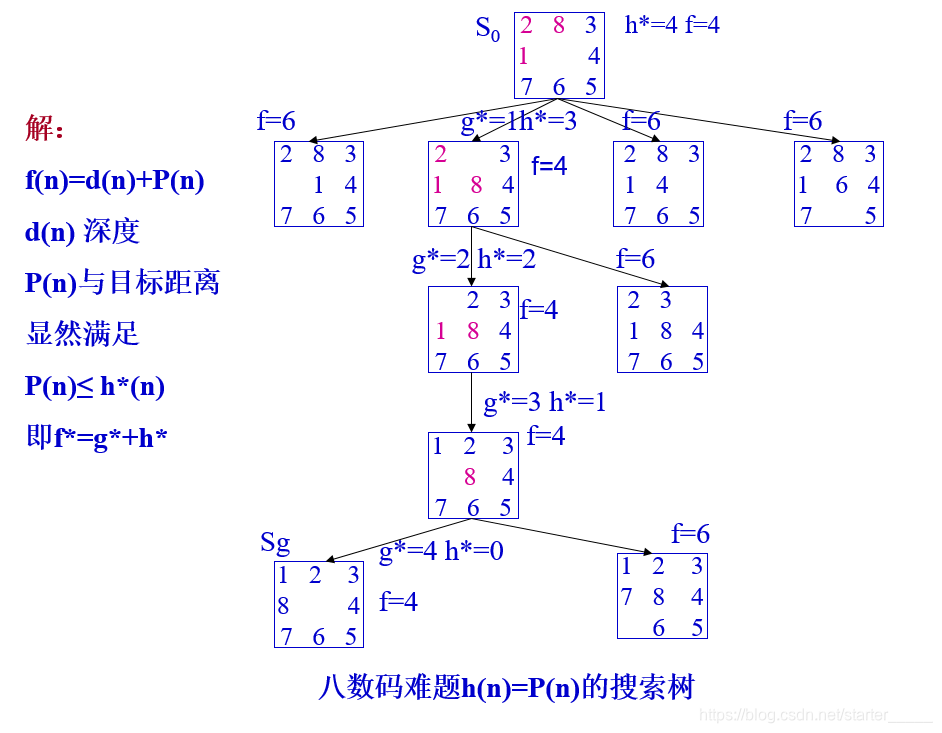
三、A *アルゴリズムのインスタンス