序文
最新バージョンの PX4 ファームウェアを使用していますが、オフボード モードの航空機が離陸できません。インターネット上ではファームウェアのバージョンに問題があると言われています。記載されている状況を説明するリンクを追加するために古いバージョンを使用させてください
。
このリンクで説明されている状況は私の状況とまったく同じなので、この方法を試してみる必要があります。
古いバージョンのインストールが進まないので、ソースから解決する予定です 引き続き、オフボードモードのドローンが離陸できない原因を調べてください。次の記事を参照してください。
オフボードモードのドローンが離陸できない問題を解決
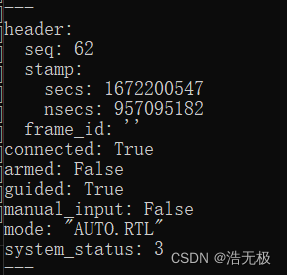
このコマンドを使用するとrostopic echo /mavros/state、クエリ結果は次のようになります。mavros が接続されていることがわかりますが、ロックを解除できません。
解決する 2 つの方法:
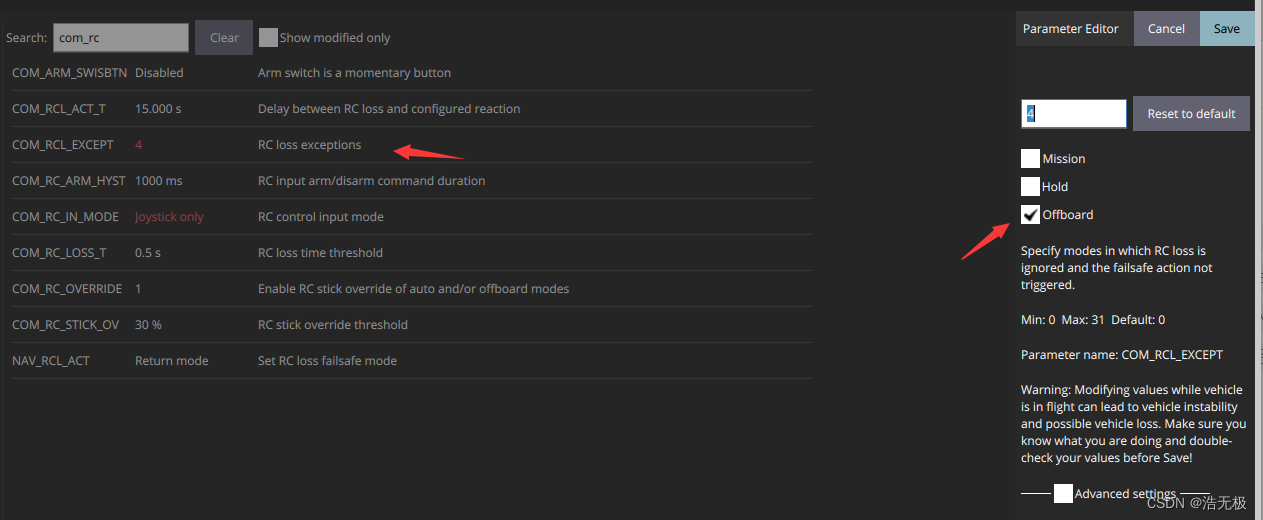
1. シミュレーションと同時に QGC を開き、COM_RCL_EXCEPT=4 を設定します
2. 動作する古いバージョンをダウンロードします 以前にこの方法を試しましたが、失敗しました。PX4 環境をインストールする際、ネットワークの調子が悪かったり、ダウンロード エラーが発生したり、ネットワークの問題によりさまざまな奇妙な問題が頻繁に発生することがあります。
方法 1 を使用して、いよいよ街づくりに着手します。
第三の解決策(2023.5.19更新)
前のファイルを開始した後。
コマンドを使用します。rosrun mavros mavparam set COM_RCL_EXCEPT 4
この方法が最も簡単です。ほぼネットワーク全体を検索しましたが、この方法については言及されていません。役に立ったら、高評価をお願いします!
参考リンク:
http://wiki.ros.org/mavros
https://masoudir.github.io/mavros_tutorial/Chapter1_ArduRover_with_CLI/Step4_How_to_set_and_get_parameters/