ROSシリーズ
序文
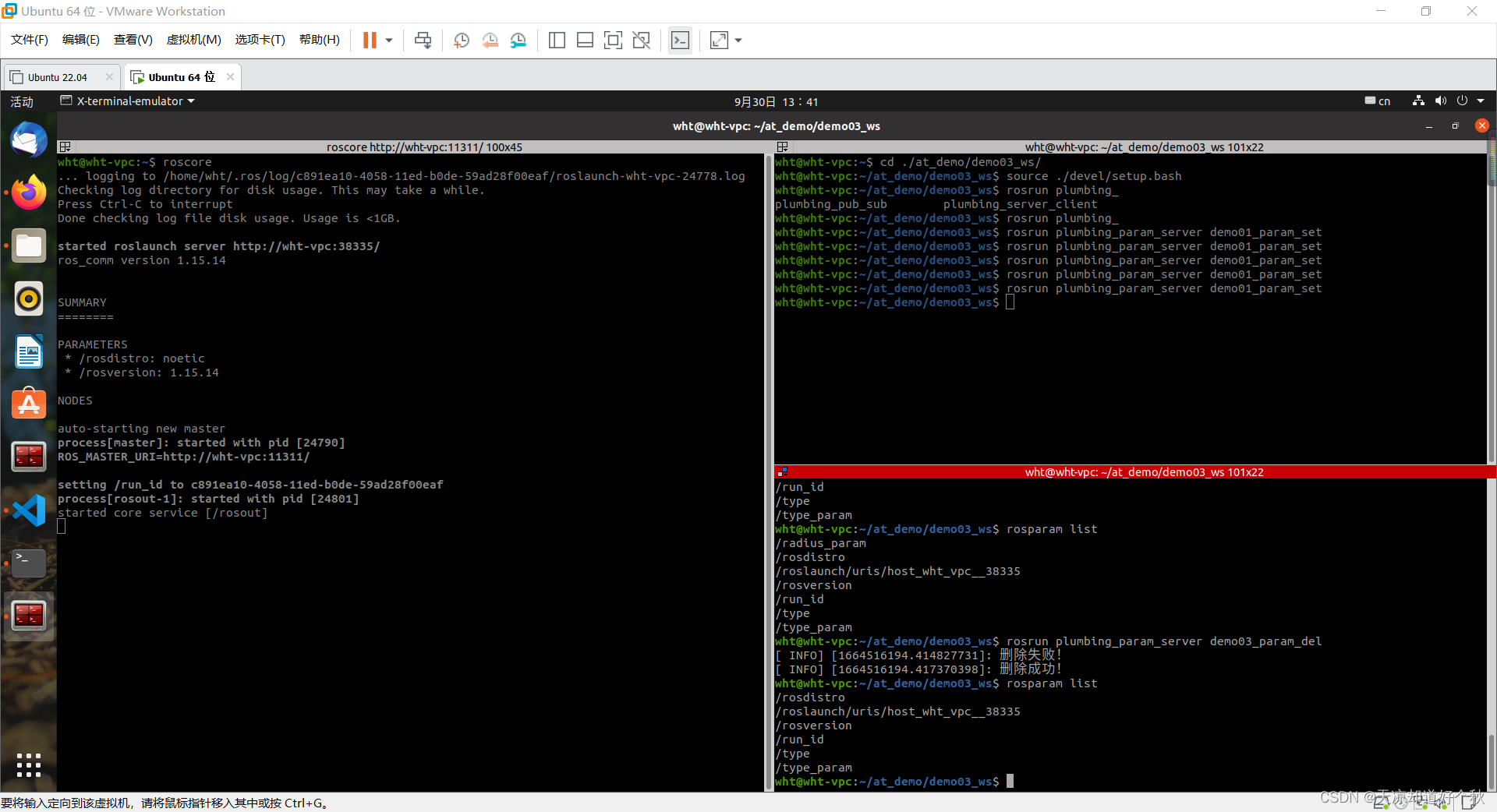
パラメータサーバーの削除操作
1. 削除
1.ノードハンドル
コードは次のとおりです(例)。
// 1.NodeHandle
bool flag1 = nh.deleteParam("radius");
if(flag1){
ROS_INFO("删除成功!");
}else{
ROS_INFO("删除失败!");
}
2.ros::param
コードは次のとおりです(例)。
// 2.ros::param
bool flag2 = ros::param::del("radius_param");
if (flag2)
{
ROS_INFO("删除成功!");
}
else
{
ROS_INFO("删除失败!");
}
すべき
#include <ros/ros.h>
/**
* @brief 删除参数服务器存储变量
*
* @param argc
* @param argv
* @return int
*/
int main(int argc, char* argv[])
{
setlocale(LC_ALL, "");
ros::init(argc, argv, "del_param_c");
ros::NodeHandle nh;
// 1.NodeHandle
bool flag1 = nh.deleteParam("radius");
if(flag1){
ROS_INFO("删除成功!");
}else{
ROS_INFO("删除失败!");
}
// 2.ros::param
bool flag2 = ros::param::del("radius_param");
if (flag2)
{
ROS_INFO("删除成功!");
}
else
{
ROS_INFO("删除失败!");
}
return 0;
}
要約する
パラメータサーバーに保存されている関連データを削除できます