記事ディレクトリ
序文

このブログの起源は上記の通りです (笑)、WSL2 関連のインストールチュートリアルは私の以前のブログを参照してください: Win11 で WSL2 と Nvidia ドライバーをインストールする
私のブログへようこそ。その他の記事もご覧いただけます。技術的な詳細についても詳しく説明します~
CMakeをインストールする
ubuntu上で実行してください
sudo apt install cmake -y
またはコンパイルしてインストールする
# 以v3.25.1版本为例
git clone -b v3.25.1 https://github.com/Kitware/CMake.git
cd CMake
# 你使用`--prefix`来指定安装路径,或者去掉`--prefix`,安装在默认路径。
./bootstrap --prefix=<安装路径> && make && sudo make install
# 验证
cmake --version
エラーが報告された場合はCould NOT find OpenSSL、次の依存関係をインストールして解決します。
sudo apt update
sudo apt upgrade
sudo apt install libssl-dev
OpenCVとFFmpegをインストールする
sudo apt install libopencv-dev
sudo apt install ffmpeg
Windows ネイティブ RTSP ビデオ ストリーミングを開始する
EasyDarwin をダウンロードして解凍します。
Easydarwinは国内チームが開発したオープンソースのストリーミングメディアフレームワークです。Go 言語に基づいて開発されており、2012 年 12 月から作成および開発されており、当初の単一サービスのストリーミング メディア サーバー形式から現在のクラウド プラットフォーム アーキテクチャのオープン ソース プロジェクトに拡張されました。ソース RTSP ストリーミング メディア サーバー Github 上で広く歓迎されています。
機能: RTSP プッシュ モード転送、RTSP プル モード転送、ビデオ録画、取得、再生、キーフレーム バッファリング、2 番目のオープニング画面、RESTful インターフェイス、WEB バックグラウンド管理、分散負荷分散。
EasyDarwin.exeを直接実行する
Ctrl + C でサービスを停止します。ブラウザを開き、 http://localhost:10008 と入力してコントロール ページに入ります。デフォルトのユーザー名とパスワードは admin/admin です。
ネイティブカメラデバイスを表示する
ffmpeg を Windows にローカルにインストールする
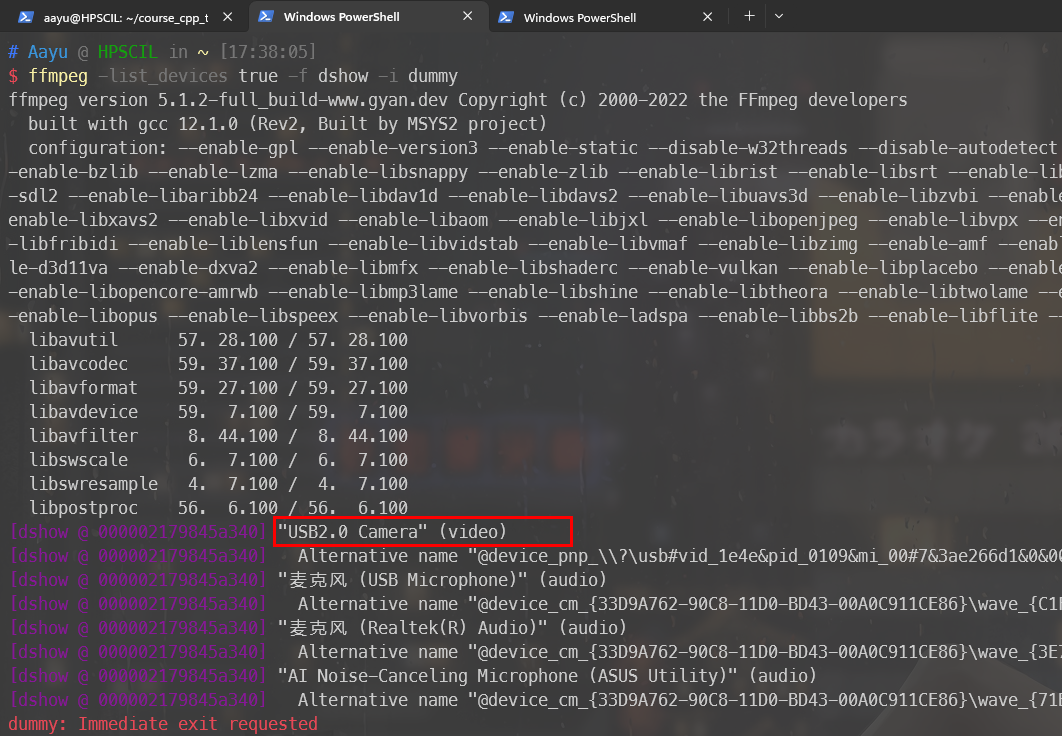
次のようにネイティブ カメラ デバイス コマンドを表示します。
ffmpeg -list_devices true -f dshow -i dummy
ストリーミングを開始する
ffmpeg -f dshow -i video="USB2.0 Camera" -vcodec libx264 -preset:v ultrafast -tune:v zerolatency -rtsp_transport tcp -f rtsp rtsp://192.168.1.101/test
パラメータの説明
-f dshow -i video="摄像头名称"ローカル カメラからビデオ ストリームを読み取るように指定します。「カメラ名」をカメラ名に置き換えます (例: 「USB2.0 カメラ」)。-vcodec libx264ビデオのエンコードに x264 エンコーダーを使用するように指定します。-preset ultrafastエンコード速度を設定します。ここでは最速のエンコード速度が使用されますが、ビデオ品質が低下する可能性があります。-tune zerolatencyエンコーダーをゼロ遅延に設定します。-f rtsp出力ストリームの形式が RTSP であることを指定します。rtsp://<IP地址>/<路径>RTSPストリームの宛先アドレスを指定します。Windows のネイティブ IP アドレスとストリームに指定するパスに<IP地址>置き換えてください。<路径>
成功したストリーミングは次のとおりです。コンソールが実行され続けるように注意してください。

ローカル ファイアウォールを開きます (オプション)
WSL2 でこのマシンの RTSP ビデオ ストリームにアクセスしたいため、次の図に示すように、このマシンのファイアウォールを開く必要があります。

プライベートネットワークとパブリックネットワークをオフにする
OpenCVでビデオストリームを受信する
コードは以下のように表示されます
#include <opencv2/opencv.hpp>
#include <iostream>
#include <string>
int main(int argc, char **argv)
{
// Ubuntu安装ffmpeg:sudo apt-get install ffmpeg
// rtsp地址,模拟四路视频流进行展示
std::string rtsp1 = "rtsp://172.27.148.34/test";
std::string rtsp2 = rtsp1;
std::string rtsp3 = rtsp1;
std::string rtsp4 = rtsp1;
// CAP_FFMPEG:使用ffmpeg解码
cv::VideoCapture stream1 = cv::VideoCapture(rtsp1, cv::CAP_FFMPEG);
cv::VideoCapture stream2 = cv::VideoCapture(rtsp2, cv::CAP_FFMPEG);
cv::VideoCapture stream3 = cv::VideoCapture(rtsp3, cv::CAP_FFMPEG);
cv::VideoCapture stream4 = cv::VideoCapture(rtsp4, cv::CAP_FFMPEG);
if (!stream1.isOpened() || !stream2.isOpened() || !stream3.isOpened() || !stream4.isOpened())
{
std::cout << "有视频流未打开" << std::endl;
return -1;
}
cv::Mat frame1;
cv::Mat frame2;
cv::Mat frame3;
cv::Mat frame4;
cv::Mat H1, H2, V, blur;
// 使用namedWindow创建窗口,WINDOW_AUTOSIZE:自动调整窗口大小
cv::namedWindow("rtsp_demo", cv::WINDOW_AUTOSIZE);
while (true)
{
if (!stream1.read(frame1) || !stream2.read(frame2) || !stream3.read(frame3) || !stream4.read(frame4))
{
std::cout << "有视频流未读取" << std::endl;
continue;
}
// 缩放等处理
cv::resize(frame1, frame1, cv::Size(500, 300));
cv::resize(frame2, frame2, cv::Size(500, 300));
cv::flip(frame2, frame2, 1);
cv::resize(frame3, frame3, cv::Size(500, 300));
cv::cvtColor(frame1, frame1, cv::COLOR_BGR2GRAY);
cv::cvtColor(frame1, frame1, cv::COLOR_GRAY2BGR);
cv::resize(frame4, frame4, cv::Size(500, 300));
cv::putText(frame4, "RTSP demo", cv::Point(100, 100), cv::FONT_ITALIC, 1, cv::Scalar(0, 0, 255), 2);
// 拼接
cv::hconcat(frame1, frame2, H1);
cv::hconcat(frame3, frame4, H2);
cv::vconcat(H1, H2, V);
// 高斯模糊一下
cv::GaussianBlur(V, blur, cv::Size(25, 25), 0);
cv::imshow("rtsp_demo", blur);
if (cv::waitKey(1) == 27)
{
break;
}
}
return 0;
}
CMakeLists.txtの内容は以下の通りです
# 最低版本要求
cmake_minimum_required(VERSION 3.10)
# 项目信息
project(rtsp_demo)
# 添加opencv库
find_package(OpenCV REQUIRED)
# 添加头文件
include_directories(${OpenCV_INCLUDE_DIRS})
# 添加库文件
link_libraries(${OpenCV_LIBS})
# 添加可执行程序
add_executable(rtsp_demo src/main.cpp)
cmakeの設定とビルドを開始する
cmake -S . -B build
cmake --build build
実行可能ファイルを実行する
./build/rtsp_demo
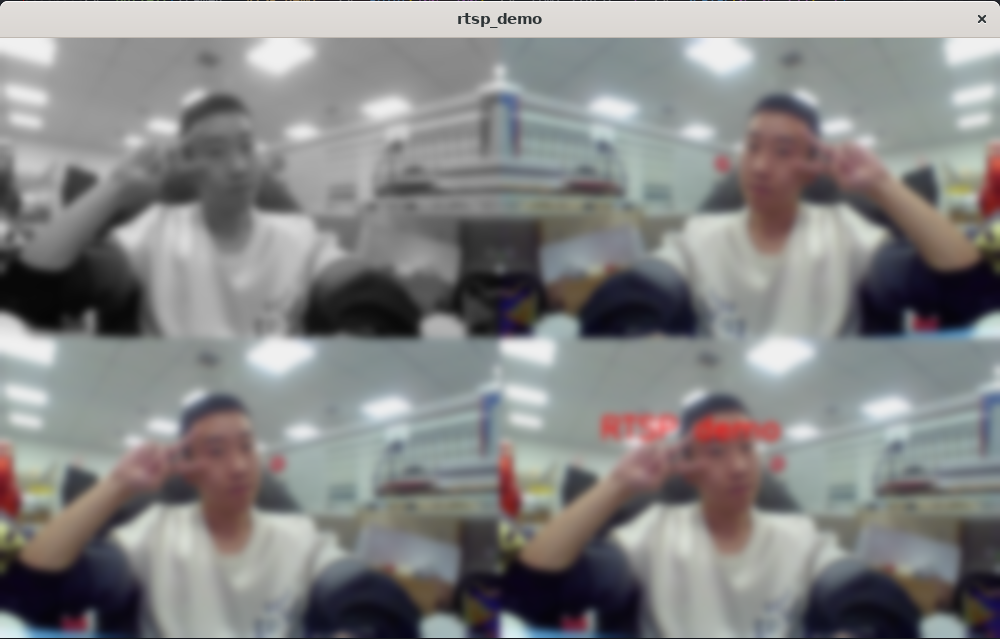
結果表示
WSL2を使用して4つのRTSPビデオストリームを表示することに成功しました~