notas de estudio de opencv 2
-
-
- Imagen en escala de grises
- VHS
- umbral de imagen
- Suavizado de imagen
- Operaciones de morfología-corrosión.
- Operación de expansión de morfología
- Operaciones de apertura y cierre.
- Operación de gradiente
- Sombrero de copa y sombrero negro
- Operador Sobel de gradiente de imagen
- Degradado de imagen: operador Scharr
- Operador laplaciano de gradiente de imagen
- Detección de bordes astuta
- pirámide de imagen
- contorno de la imagen
- Transformada de Fourier
- El papel de la transformada de Fourier
- filtrar
-
Imagen en escala de grises
import cv2 #opencv读取的格式是BGR
import numpy as np
import matplotlib.pyplot as plt#Matplotlib是RGB
%matplotlib inline
img=cv2.imread('cat.jpg')
img_gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
img_gray.shape
(414, 500)
cv2.imshow("img_gray", img_gray)
cv2.waitKey(0)
cv2.destroyAllWindows()
VHS
- H - Tono (longitud de onda dominante).
- S - Saturación (pureza/tono de color).
- Valor V (intensidad)
hsv=cv2.cvtColor(img,cv2.COLOR_BGR2HSV)
cv2.imshow("hsv", hsv)
cv2.waitKey(0)
cv2.destroyAllWindows()
b,g,r = cv2.split(hsv)
hsv_rgb = cv2.merge((r,g,b))
plt.imshow(hsv_rgb)
plt.show()

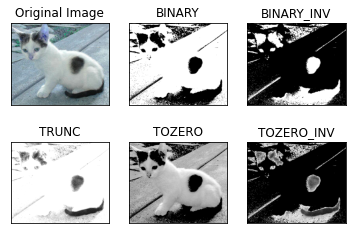
umbral de imagen
ret, dst = cv2.threshold(src, umbral, maxval, tipo)
-
src: imagen de entrada, solo se pueden ingresar imágenes de un solo canal, generalmente imágenes en escala de grises
-
dst: gráfico de salida
-
umbral: umbral
-
maxval: cuando el valor del píxel excede el umbral (o es menor que el umbral, según el tipo), el valor asignado
-
tipo: el tipo de operación binaria, incluidos los siguientes 5 tipos: cv2.THRESH_BINARY; cv2.THRESH_BINARY_INV; cv2.THRESH_TRUNC; cv2.THRESH_TOZERO; cv2.THRESH_TOZERO_INV
-
cv2.THRESH_BINARY toma maxval (valor máximo) para la parte que excede el umbral; de lo contrario, toma 0
-
cv2.THRESH_BINARY_INV Inversión de THRESH_BINARY
-
cv2.THRESH_TRUNC La parte mayor que el umbral se establece en el umbral; de lo contrario, permanece sin cambios
-
cv2.THRESH_TOZERO La parte mayor que el umbral no se cambia; de lo contrario, se establece en 0
-
cv2.THRESH_TOZERO_INV La inversión de THRESH_TOZERO
ret, thresh1 = cv2.threshold(img_gray, 127, 255, cv2.THRESH_BINARY)
ret, thresh2 = cv2.threshold(img_gray, 127, 255, cv2.THRESH_BINARY_INV)
ret, thresh3 = cv2.threshold(img_gray, 127, 255, cv2.THRESH_TRUNC)
ret, thresh4 = cv2.threshold(img_gray, 127, 255, cv2.THRESH_TOZERO)
ret, thresh5 = cv2.threshold(img_gray, 127, 255, cv2.THRESH_TOZERO_INV)
titles = ['Original Image', 'BINARY', 'BINARY_INV', 'TRUNC', 'TOZERO', 'TOZERO_INV']
images = [img, thresh1, thresh2, thresh3, thresh4, thresh5]
for i in range(6):
plt.subplot(2, 3, i + 1), plt.imshow(images[i], 'gray')
plt.title(titles[i])
plt.xticks([]), plt.yticks([])
plt.show()
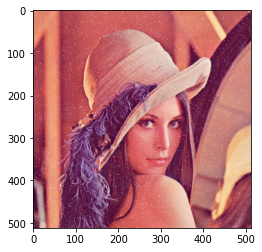
Suavizado de imagen
img = cv2.imread('lenaNoise.png')
cv2.imshow('img', img)
cv2.waitKey(0)
cv2.destroyAllWindows()
b,g,r = cv2.split(img)
img_rgb = cv2.merge((r,g,b))
plt.imshow(img_rgb)
plt.show()
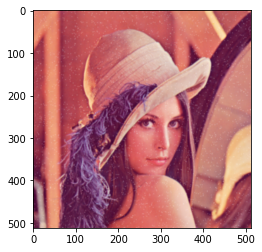
# 均值滤波
# 简单的平均卷积操作
blur = cv2.blur(img, (3, 3))
cv2.imshow('blur', blur)
cv2.waitKey(0)
cv2.destroyAllWindows()
b,g,r = cv2.split(blur)
blur_rgb = cv2.merge((r,g,b))
plt.imshow(blur_rgb)
plt.show()
# 方框滤波
# 基本和均值一样,可以选择归一化
box = cv2.boxFilter(img,-1,(3,3), normalize=True) #-1表示颜色通道数与之前输入的图像颜色通道数一致
cv2.imshow('box', box)
cv2.waitKey(0)
cv2.destroyAllWindows()
b,g,r = cv2.split(box)
box_rgb = cv2.merge((r,g,b))
plt.imshow(box_rgb)
plt.show()
# 方框滤波
# 基本和均值一样,可以选择归一化,容易越界 ,即像素值大于255
box = cv2.boxFilter(img,-1,(3,3), normalize=False)
cv2.imshow('box', box)
cv2.waitKey(0)
cv2.destroyAllWindows()
b,g,r = cv2.split(box)
box_rgb = cv2.merge((r,g,b))
plt.imshow(box_rgb)
plt.show()

# 高斯滤波
# 高斯模糊的卷积核里的数值是满足高斯分布,相当于更重视中间的,即核中间像素值的权重比较大
aussian = cv2.GaussianBlur(img, (5, 5), 1)
cv2.imshow('aussian', aussian)
cv2.waitKey(0)
cv2.destroyAllWindows()
b,g,r = cv2.split(aussian)
aussian_rgb = cv2.merge((r,g,b))
plt.imshow(aussian_rgb)
plt.show()

# 中值滤波
# 相当于用中值代替
median = cv2.medianBlur(img, 5) # 中值滤波
cv2.imshow('median', median)
cv2.waitKey(0)
cv2.destroyAllWindows()
b,g,r = cv2.split(median)
median_rgb = cv2.merge((r,g,b))
plt.imshow(median_rgb)
plt.show()

# 展示所有的
res = np.hstack((blur,aussian,median)) #横着拼接在一起
#res = np.vstack((blur,aussian,median)) #竖着拼接在一起
#print (res)
cv2.imshow('median vs average', res)
cv2.waitKey(0)
cv2.destroyAllWindows()
b,g,r = cv2.split(res)
res_rgb = cv2.merge((r,g,b))
plt.imshow(res_rgb)
plt.show()
Operaciones de morfología-corrosión.
img = cv2.imread('cloudytosunny1.png')
cv2.imshow('img', img)
cv2.waitKey(0)
cv2.destroyAllWindows()
b,g,r = cv2.split(img)
img_rgb = cv2.merge((r,g,b))
plt.imshow(img_rgb)
plt.show()
kernel = np.ones((4,4),np.uint8)
erosion = cv2.erode(img,kernel,iterations = 1)
cv2.imshow('erosion', erosion)
cv2.waitKey(0)
cv2.destroyAllWindows()
b,g,r = cv2.split(erosion)
erosion_rgb = cv2.merge((r,g,b))
plt.imshow(erosion_rgb)
plt.show()

pie = cv2.imread('pie.png')
cv2.imshow('pie', pie)
cv2.waitKey(0)
cv2.destroyAllWindows()
b,g,r = cv2.split(pie)
pie_rgb = cv2.merge((r,g,b))
plt.imshow(pie_rgb)
plt.show()
kernel = np.ones((30,30),np.uint8)
erosion_1 = cv2.erode(pie,kernel,iterations = 1)
erosion_2 = cv2.erode(pie,kernel,iterations = 2)
erosion_3 = cv2.erode(pie,kernel,iterations = 3)
res = np.hstack((erosion_1,erosion_2,erosion_3))
cv2.imshow('res', res)
cv2.waitKey(0)
cv2.destroyAllWindows()
b,g,r = cv2.split(res)
res_rgb = cv2.merge((r,g,b))
plt.imshow(res_rgb)
plt.show()

Operación de expansión de morfología
img = cv2.imread('cloudytosunny1.png')
cv2.imshow('img', img)
cv2.waitKey(0)
cv2.destroyAllWindows()
b,g,r = cv2.split(img)
img_rgb = cv2.merge((r,g,b))
plt.imshow(img_rgb)
plt.show()
kernel = np.ones((5,5),np.uint8)
sunny_erosion = cv2.erode(img,kernel,iterations = 1)
cv2.imshow('erosion', sunny_erosion)
cv2.waitKey(0)
cv2.destroyAllWindows()
b,g,r = cv2.split(sunny_erosion)
sunny_erosion_rgb = cv2.merge((r,g,b))
plt.imshow(sunny_erosion_rgb)
plt.show()
kernel = np.ones((5,5),np.uint8)
sunny_dilate = cv2.dilate(sunny_erosion,kernel,iterations = 1)
cv2.imshow('dilate', sunny_dilate)
cv2.waitKey(0)
cv2.destroyAllWindows()
b,g,r = cv2.split(sunny_dilate)
sunny_dilate_rgb = cv2.merge((r,g,b))
plt.imshow(sunny_dilate_rgb)
plt.show()
pie = cv2.imread('pie.png')
kernel = np.ones((30,30),np.uint8)
dilate_1 = cv2.dilate(pie,kernel,iterations = 1)
dilate_2 = cv2.dilate(pie,kernel,iterations = 2)
dilate_3 = cv2.dilate(pie,kernel,iterations = 3)
res = np.hstack((dilate_1,dilate_2,dilate_3))
cv2.imshow('res', res)
cv2.waitKey(0)
cv2.destroyAllWindows()
b,g,r = cv2.split(res)
res_rgb = cv2.merge((r,g,b))
plt.imshow(res_rgb)
plt.show()

Operaciones de apertura y cierre.
# 开:先腐蚀,再膨胀
img = cv2.imread('cloudytosunny1.png')
kernel = np.ones((5,5),np.uint8)
opening = cv2.morphologyEx(img, cv2.MORPH_OPEN, kernel)
cv2.imshow('opening', opening)
cv2.waitKey(0)
cv2.destroyAllWindows()
b,g,r = cv2.split(opening)
opening_rgb = cv2.merge((r,g,b))
plt.imshow(opening_rgb)
plt.show()
# 闭:先膨胀,再腐蚀
img = cv2.imread('cloudytosunny1.png')
kernel = np.ones((5,5),np.uint8)
closing = cv2.morphologyEx(img, cv2.MORPH_CLOSE, kernel)
cv2.imshow('closing', closing)
cv2.waitKey(0)
cv2.destroyAllWindows()
b,g,r = cv2.split(closing)
closing_rgb = cv2.merge((r,g,b))
plt.imshow(closing_rgb)
plt.show()
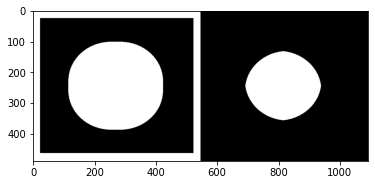
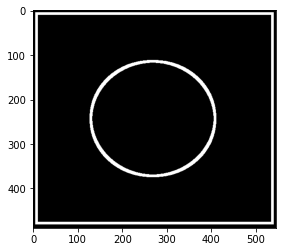
Operación de gradiente
# 梯度=膨胀-腐蚀
pie = cv2.imread('pie.png')
kernel = np.ones((7,7),np.uint8)
dilate = cv2.dilate(pie,kernel,iterations = 5)
erosion = cv2.erode(pie,kernel,iterations = 5)
res = np.hstack((dilate,erosion))
b,g,r = cv2.split(res)
res_rgb = cv2.merge((r,g,b))
plt.imshow(res_rgb)
plt.show()
gradient = cv2.morphologyEx(pie, cv2.MORPH_GRADIENT, kernel)
b,g,r = cv2.split(gradient)
gradient_rgb = cv2.merge((r,g,b))
plt.imshow(gradient_rgb)
plt.show()
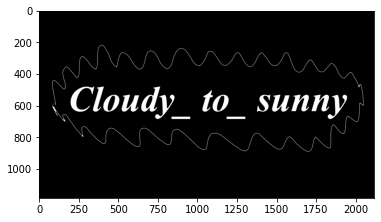
Sombrero de copa y sombrero negro
- Sombrero de copa = entrada original - resultado de la operación abierta
- Sombrero negro = operación cerrada - entrada original
#礼帽
img = cv2.imread('cloudytosunny1.png')
tophat = cv2.morphologyEx(img, cv2.MORPH_TOPHAT, kernel)
b,g,r = cv2.split(tophat)
tophat_rgb = cv2.merge((r,g,b))
plt.imshow(tophat_rgb)
plt.show()
#黑帽
img = cv2.imread('cloudytosunny1.png')
blackhat = cv2.morphologyEx(img,cv2.MORPH_BLACKHAT, kernel)
b,g,r = cv2.split(blackhat)
blackhat_rgb = cv2.merge((r,g,b))
plt.imshow(blackhat_rgb)
plt.show()

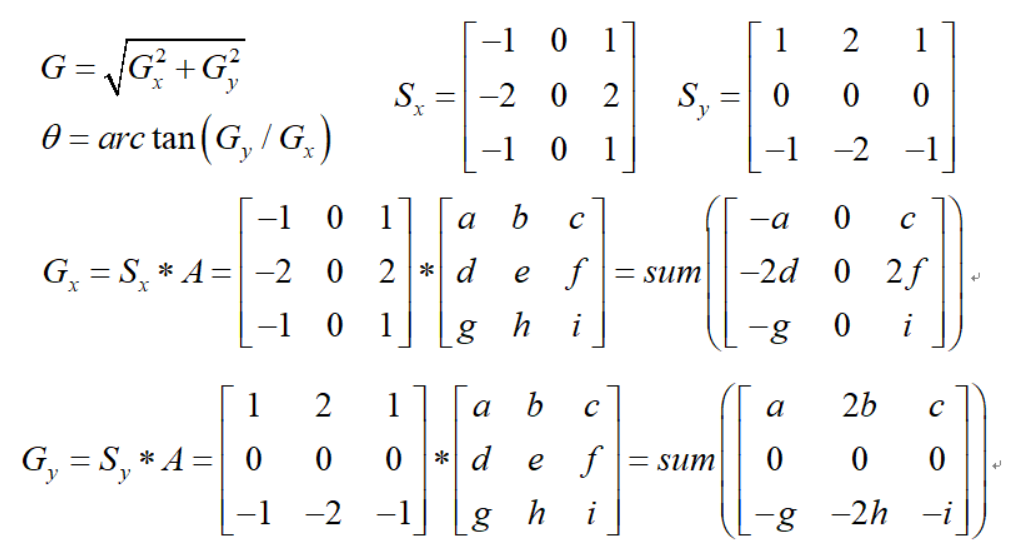
Operador Sobel de gradiente de imagen

img = cv2.imread('pie.png',cv2.IMREAD_GRAYSCALE)
# b,g,r = cv2.split(img)
# img_rgb = cv2.merge((r,g,b))
plt.imshow(img)
plt.show()
cv2.imshow("img",img)
cv2.waitKey()
cv2.destroyAllWindows()
dst = cv2.Sobel(src, dprofundidad, dx, dy, ksize)
- dprofundidad: profundidad de la imagen
- dx y dy representan las direcciones horizontal y vertical respectivamente
- ksize es el tamaño del operador Sobel
def cv_show(img,name):
b,g,r = cv2.split(img)
img_rgb = cv2.merge((r,g,b))
plt.imshow(img_rgb)
plt.show()
def cv_show1(img,name):
plt.imshow(img)
plt.show()
cv2.imshow(name,img)
cv2.waitKey()
cv2.destroyAllWindows()
sobelx = cv2.Sobel(img,cv2.CV_64F,1,0,ksize=3)
cv_show1(sobelx,'sobelx')
De blanco a negro es un número positivo, de negro a blanco es un número negativo. Todos los números negativos se truncarán a 0, por lo que se debe tomar el valor absoluto.
sobelx = cv2.Sobel(img,cv2.CV_64F,1,0,ksize=3)
sobelx = cv2.convertScaleAbs(sobelx)
cv_show1(sobelx,'sobelx')
sobely = cv2.Sobel(img,cv2.CV_64F,0,1,ksize=3)
sobely = cv2.convertScaleAbs(sobely)
cv_show1(sobely,'sobely')
Calcule x e y por separado, luego sume
sobelxy = cv2.addWeighted(sobelx,0.5,sobely,0.5,0)
cv_show1(sobelxy,'sobelxy')
No se recomienda calcular directamente.
sobelxy=cv2.Sobel(img,cv2.CV_64F,1,1,ksize=3)
sobelxy = cv2.convertScaleAbs(sobelxy)
cv_show1(sobelxy,'sobelxy')
img = cv2.imread('lena.jpg',cv2.IMREAD_GRAYSCALE)
cv_show1(img,'img')

img = cv2.imread('lena.jpg',cv2.IMREAD_GRAYSCALE)
sobelx = cv2.Sobel(img,cv2.CV_64F,1,0,ksize=3)
sobelx = cv2.convertScaleAbs(sobelx)
sobely = cv2.Sobel(img,cv2.CV_64F,0,1,ksize=3)
sobely = cv2.convertScaleAbs(sobely)
sobelxy = cv2.addWeighted(sobelx,0.5,sobely,0.5,0)
cv_show1(sobelxy,'sobelxy')
img = cv2.imread('lena.jpg',cv2.IMREAD_GRAYSCALE)
sobelxy=cv2.Sobel(img,cv2.CV_64F,1,1,ksize=3)
sobelxy = cv2.convertScaleAbs(sobelxy)
cv_show(sobelxy,'sobelxy')
Degradado de imagen: operador Scharr

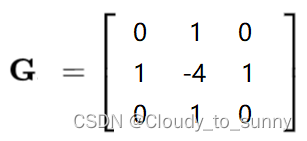
Operador laplaciano de gradiente de imagen
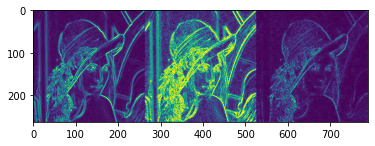
#不同算子的差异
img = cv2.imread('lena.jpg',cv2.IMREAD_GRAYSCALE)
sobelx = cv2.Sobel(img,cv2.CV_64F,1,0,ksize=3)
sobely = cv2.Sobel(img,cv2.CV_64F,0,1,ksize=3)
sobelx = cv2.convertScaleAbs(sobelx)
sobely = cv2.convertScaleAbs(sobely)
sobelxy = cv2.addWeighted(sobelx,0.5,sobely,0.5,0)
scharrx = cv2.Scharr(img,cv2.CV_64F,1,0)
scharry = cv2.Scharr(img,cv2.CV_64F,0,1)
scharrx = cv2.convertScaleAbs(scharrx)
scharry = cv2.convertScaleAbs(scharry)
scharrxy = cv2.addWeighted(scharrx,0.5,scharry,0.5,0)
laplacian = cv2.Laplacian(img,cv2.CV_64F) #一般不会单独使用,会跟其他方法联合使用
laplacian = cv2.convertScaleAbs(laplacian)
res = np.hstack((sobelxy,scharrxy,laplacian))
cv_show1(res,'res')
img = cv2.imread('lena.jpg',cv2.IMREAD_GRAYSCALE)
cv_show1(img,'img')

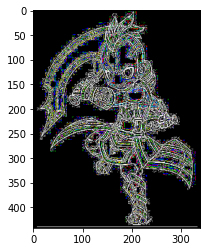
Detección de bordes astuta
-
-
使用高斯滤波器,以平滑图像,滤除噪声。
-
-
-
计算图像中每个像素点的梯度强度和方向。
-
-
-
应用非极大值(Non-Maximum Suppression)抑制,以消除边缘检测带来的杂散响应。
-
-
-
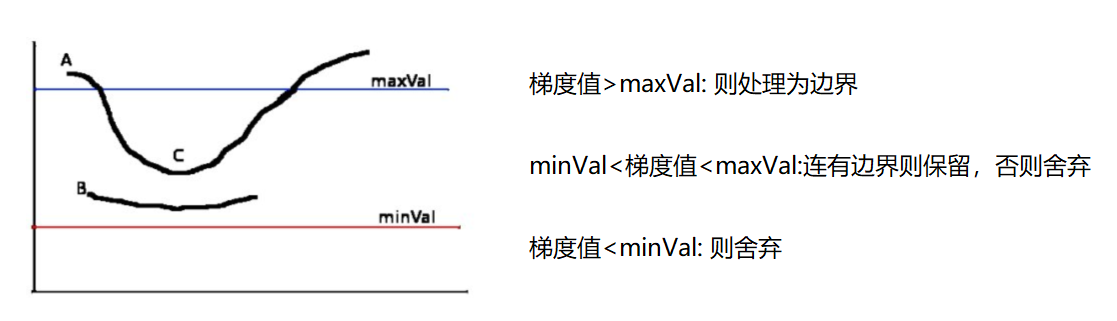
应用双阈值(Double-Threshold)检测来确定真实的和潜在的边缘。
-
-
-
通过抑制孤立的弱边缘最终完成边缘检测。
-
1: filtro gaussiano

2: gradiente y dirección
3: supresión no máxima
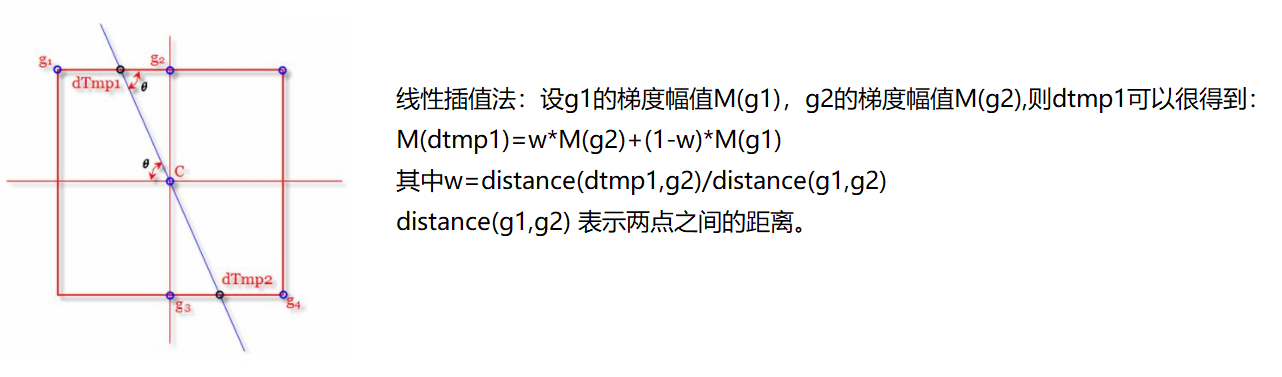
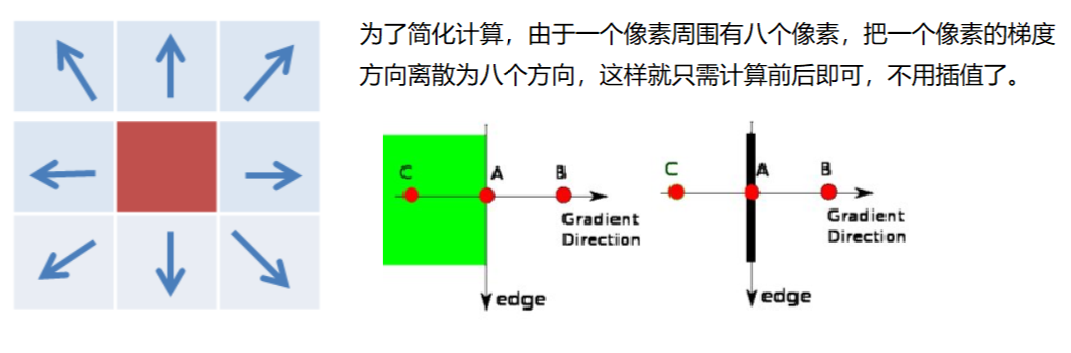
4: Detección de doble umbral
img=cv2.imread("lena.jpg",cv2.IMREAD_GRAYSCALE)
v1=cv2.Canny(img,80,150)
v2=cv2.Canny(img,50,100)
res = np.hstack((v1,v2))
cv_show1(res,'res')

img=cv2.imread("car.png",cv2.IMREAD_GRAYSCALE)
v1=cv2.Canny(img,120,250)
v2=cv2.Canny(img,50,100)
res = np.hstack((v1,v2))
cv_show1(res,'res')

pirámide de imagen
- Pirámide gaussiana
- Pirámide de Laplace
Pirámide gaussiana: método de reducción de resolución (reducción de tamaño)
Pirámide gaussiana: método de muestreo ascendente (zoom-up)
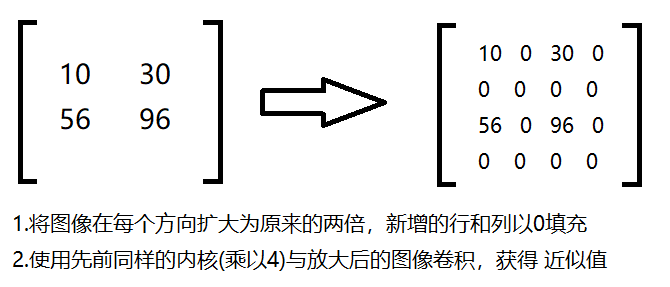
img=cv2.imread("AM.png")
cv_show(img,'img')
print (img.shape)

(442, 340, 3)
up=cv2.pyrUp(img)
cv_show(up,'up')
print (up.shape)

(884, 680, 3)
down=cv2.pyrDown(img)
cv_show(down,'down')
print (down.shape)

(221, 170, 3)
up2=cv2.pyrUp(up)
cv_show(up2,'up2')
print (up2.shape)

(1768, 1360, 3)
up=cv2.pyrUp(img)
up_down=cv2.pyrDown(up)
cv_show(up_down,'up_down')

cv_show(np.hstack((img,up_down)),'up_down')

up=cv2.pyrUp(img)
up_down=cv2.pyrDown(up)
cv_show(img-up_down,'img-up_down')
Pirámide de Laplace
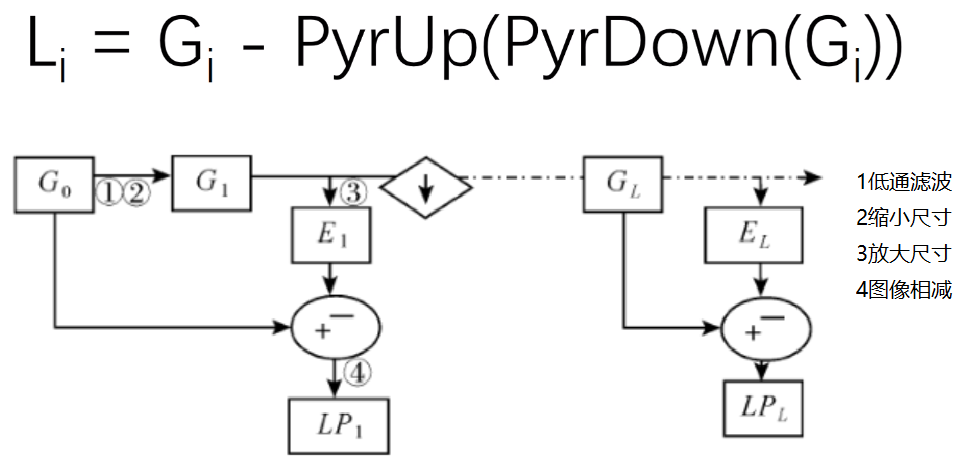
down=cv2.pyrDown(img)
down_up=cv2.pyrUp(down)
l_1=img-down_up
cv_show(l_1,'l_1')
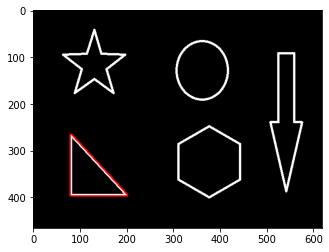
contorno de la imagen
cv2.findContours(img,modo,método)
modo: modo de recuperación de contorno
- RETR_EXTERNAL: recupera solo el contorno más externo;
- RETR_LIST: recupera todos los contornos y guárdalos en una lista vinculada;
- RETR_CCOMP: recupera todos los contornos y los organiza en dos capas: la capa superior es el límite exterior de cada parte y la segunda capa es el límite del agujero;
- RETR_TREE: recupera todos los contornos y reconstruye toda la jerarquía de contornos anidados;
método:Método de aproximación del contorno
- CHAIN_APPROX_NONE: Genera contornos en código de cadena Freeman, todos los demás métodos generan polígonos (secuencias de vértices).
- CHAIN_APPROX_SIMPLE: Comprime las partes horizontales, verticales y oblicuas, es decir, la función solo conserva sus puntos finales.
Para mayor precisión, utilice imágenes binarias.
img = cv2.imread('contours.png')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
cv_show1(thresh,'thresh')
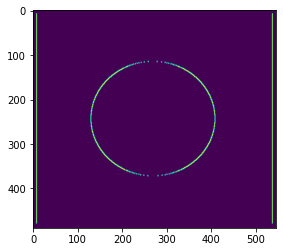
binary, contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)
Dibujar contorno
cv_show(img,'img')
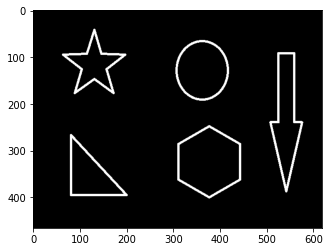
#传入绘制图像,轮廓,轮廓索引,颜色模式,线条厚度
# 注意需要copy,要不原图会变。。。
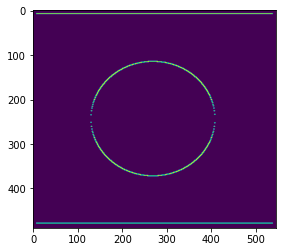
draw_img = img.copy()
res = cv2.drawContours(draw_img, contours, -1, (0, 0, 255), 2)
cv_show(res,'res')
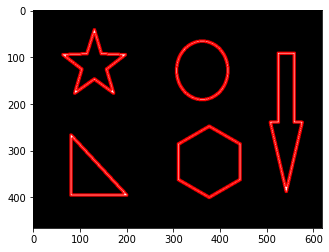
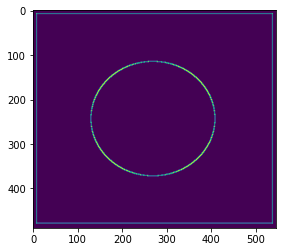
draw_img = img.copy()
res = cv2.drawContours(draw_img, contours, 0, (0, 0, 255), 2)
cv_show(res,'res')
Características del contorno
cnt = contours[0]
#面积
cv2.contourArea(cnt)
8500.5
#周长,True表示闭合的
cv2.arcLength(cnt,True)
437.9482651948929
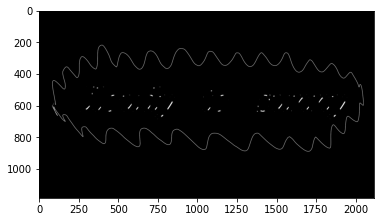
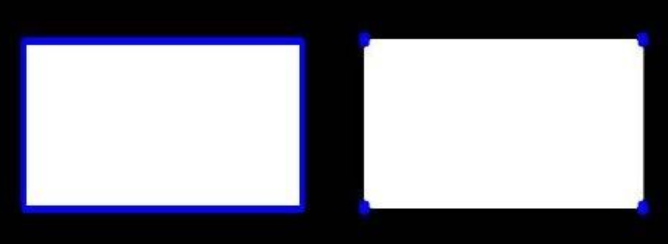
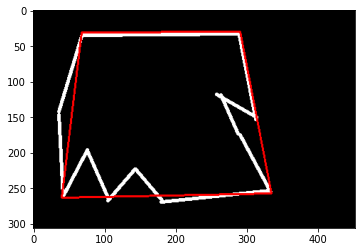
aproximación de contorno

img = cv2.imread('contours2.png')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
binary, contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)
cnt = contours[0]
draw_img = img.copy()
res = cv2.drawContours(draw_img, [cnt], -1, (0, 0, 255), 2)
cv_show(res,'res')
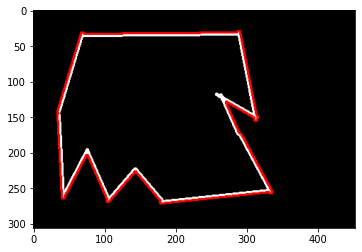
epsilon = 0.1*cv2.arcLength(cnt,True)
approx = cv2.approxPolyDP(cnt,epsilon,True)
draw_img = img.copy()
res = cv2.drawContours(draw_img, [approx], -1, (0, 0, 255), 2)
cv_show(res,'res')
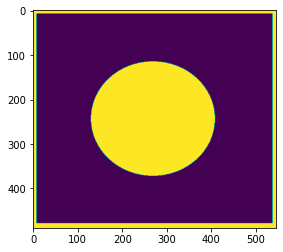
rectángulo delimitador
img = cv2.imread('contours.png')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
binary, contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)
cnt = contours[0]
x,y,w,h = cv2.boundingRect(cnt)
img = cv2.rectangle(img,(x,y),(x+w,y+h),(0,255,0),2)
cv_show(img,'img')
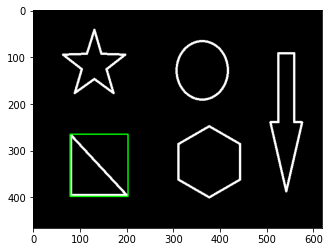
area = cv2.contourArea(cnt)
x, y, w, h = cv2.boundingRect(cnt)
rect_area = w * h
extent = float(area) / rect_area
print ('轮廓面积与边界矩形比',extent)
轮廓面积与边界矩形比 0.5154317244724715
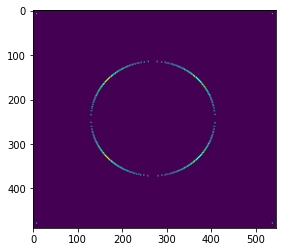
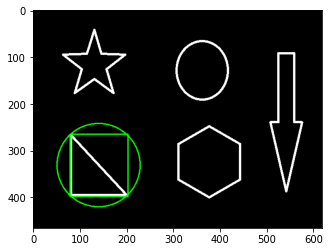
círculo circunscrito
(x,y),radius = cv2.minEnclosingCircle(cnt)
center = (int(x),int(y))
radius = int(radius)
img = cv2.circle(img,center,radius,(0,255,0),2)
cv_show(img,'img')
Transformada de Fourier
Vivimos en un mundo de tiempo, nos levantamos a las 7:00 de la mañana para desayunar, vamos al metro a las 8:00 y empezamos a trabajar a las 9:00. . . Usar el tiempo como referencia es un análisis en el dominio del tiempo.
¡Pero en el dominio de la frecuencia todo es estacionario!
https://zhuanlan.zhihu.com/p/19763358
El papel de la transformada de Fourier
-
Alta frecuencia: componentes grises que cambian drásticamente, como los límites
-
Baja frecuencia: componentes grises que cambian lentamente, como un mar
filtrar
-
Filtro de paso bajo: sólo retiene las frecuencias bajas, lo que desenfocará la imagen
-
Filtro de paso alto: solo retener las frecuencias altas mejorará los detalles de la imagen
-
Los principales en opencv son cv2.dft() y cv2.idft(). La imagen de entrada debe convertirse primero al formato np.float32.
-
La parte con frecuencia 0 en el resultado obtenido estará en la esquina superior izquierda y, por lo general, debe convertirse a la posición central, lo que se puede lograr mediante la transformación de desplazamiento.
-
El resultado devuelto por cv2.dft() es de doble canal (parte real, parte imaginaria) y, por lo general, debe convertirse a un formato de imagen para mostrarse (0,255).
import numpy as np
import cv2
from matplotlib import pyplot as plt
img = cv2.imread('lena.jpg',0)
img_float32 = np.float32(img)
dft = cv2.dft(img_float32, flags = cv2.DFT_COMPLEX_OUTPUT)
dft_shift = np.fft.fftshift(dft)
# 得到灰度图能表示的形式
magnitude_spectrum = 20*np.log(cv2.magnitude(dft_shift[:,:,0],dft_shift[:,:,1]))
plt.subplot(121),plt.imshow(img, cmap = 'gray')
plt.title('Input Image'), plt.xticks([]), plt.yticks([])
plt.subplot(122),plt.imshow(magnitude_spectrum, cmap = 'gray')
plt.title('Magnitude Spectrum'), plt.xticks([]), plt.yticks([])
plt.show()

import numpy as np
import cv2
from matplotlib import pyplot as plt
img = cv2.imread('lena.jpg',0)
img_float32 = np.float32(img)
dft = cv2.dft(img_float32, flags = cv2.DFT_COMPLEX_OUTPUT)
dft_shift = np.fft.fftshift(dft)
rows, cols = img.shape
crow, ccol = int(rows/2) , int(cols/2) # 中心位置
# 低通滤波
mask = np.zeros((rows, cols, 2), np.uint8)
mask[crow-30:crow+30, ccol-30:ccol+30] = 1
# IDFT
fshift = dft_shift*mask
f_ishift = np.fft.ifftshift(fshift)
img_back = cv2.idft(f_ishift)
img_back = cv2.magnitude(img_back[:,:,0],img_back[:,:,1])
plt.subplot(121),plt.imshow(img, cmap = 'gray')
plt.title('Input Image'), plt.xticks([]), plt.yticks([])
plt.subplot(122),plt.imshow(img_back, cmap = 'gray')
plt.title('Result'), plt.xticks([]), plt.yticks([])
plt.show()

img = cv2.imread('lena.jpg',0)
img_float32 = np.float32(img)
dft = cv2.dft(img_float32, flags = cv2.DFT_COMPLEX_OUTPUT)
dft_shift = np.fft.fftshift(dft)
rows, cols = img.shape
crow, ccol = int(rows/2) , int(cols/2) # 中心位置
# 高通滤波
mask = np.ones((rows, cols, 2), np.uint8)
mask[crow-30:crow+30, ccol-30:ccol+30] = 0
# IDFT
fshift = dft_shift*mask
f_ishift = np.fft.ifftshift(fshift)
img_back = cv2.idft(f_ishift)
img_back = cv2.magnitude(img_back[:,:,0],img_back[:,:,1])
plt.subplot(121),plt.imshow(img, cmap = 'gray')
plt.title('Input Image'), plt.xticks([]), plt.yticks([])
plt.subplot(122),plt.imshow(img_back, cmap = 'gray')
plt.title('Result'), plt.xticks([]), plt.yticks([])
plt.show()
