Existe un concepto muy importante en la reconstrucción tridimensional en la coincidencia estéreo: el volumen de costos. Los más recientes incluyen transformadores de autoatención y atención cruzada.
Script de prueba para generar nube de puntos:
import sys
sys.path.append('core')
DEVICE = 'cuda'
import os
os.environ['CUDA_VISIBLE_DEVICES'] = '0'
import argparse
import glob
import numpy as np
import torch
from tqdm import tqdm
from pathlib import Path
from igev_stereo import IGEVStereo
from utils.utils import InputPadder
from PIL import Image
from matplotlib import pyplot as plt
import os
import cv2
import time
def load_image(imfile):
img = np.array(Image.open(imfile)).astype(np.uint8)
img = torch.from_numpy(img).permute(2, 0, 1).float()
return img[None].to(DEVICE)
def load_image1(img):
# img = np.array(Image.open(imfile)).astype(np.uint8)
img = torch.from_numpy(img).permute(2, 0, 1).float()
return img[None].to(DEVICE)
def disp2pointcloud(disp, K, disline):
width = disp.shape[1]
height = disp.shape[0]
f = open('pointcloud.txt','w')
print(K[0, 2])
for i in range(width):
for j in range(height):
z = K[0, 0]/disp[j, i]*disline
x = (i-K[0, 2])/K[0, 0]*z
y = (j-K[1, 2])/K[1, 1]*z
f.write('%f %f %f\n' %(x, y, z))
f.close()
def demo(args):
model = torch.nn.DataParallel(IGEVStereo(args), device_ids=[0])
model.load_state_dict(torch.load(args.restore_ckpt))
model = model.module
model.to(DEVICE)
model.eval()
output_directory = Path(args.output_directory)
output_directory.mkdir(exist_ok=True)
with torch.no_grad():
left_images = sorted(glob.glob(args.left_imgs, recursive=True))
right_images = sorted(glob.glob(args.right_imgs, recursive=True))
print(f"Found {
len(left_images)} images. Saving files to {
output_directory}/")
for (imfile1, imfile2) in tqdm(list(zip(left_images, right_images))):
# image1 = load_image(imfile1)
# image2 = load_image(imfile2)
# print(imfile2)
start = time.time()
image1 = cv2.imread(imfile1)
image2 = cv2.imread(imfile2)
width = int(image1.shape[1] * 0.5)
height = int(image1.shape[0] * 0.5)
dim = (width, height)
image1 = cv2.resize(image1, dim, interpolation = cv2.INTER_AREA)
image2 = cv2.resize(image2, dim, interpolation = cv2.INTER_AREA)
#np.asarray(bytearray(req.read()), dtype=np.uint8)
# image1 = np.asarray(image1)
# image2 = np.asarray(image2)
image1 = load_image1(image1)
image2 = load_image1(image2)
padder = InputPadder(image1.shape, divis_by=32)
image1, image2 = padder.pad(image1, image2)
disp = model(image1, image2, iters=args.valid_iters, test_mode=True)
disp = disp.cpu().numpy()
K = np.array([[2.4219981e+03*0.5, 0, 1.2478e+3*0.5], [0, 2.4219981e+03*0.5, 1.00927e+3*0.5],[0, 0, 1]])
disline = 1.4939830129441067e+00
disp2pointcloud(disp.squeeze(), K, disline)
disp = padder.unpad(disp)
end = time.time()
print(end-start)
file_stem = imfile1.split('/')[-2]
filename = os.path.join(output_directory, f"{
file_stem}.png")
plt.imsave(output_directory / f"{
file_stem}.png", disp.squeeze(), cmap='jet')
# disp = np.round(disp * 256).astype(np.uint16)
# cv2.imwrite(filename, cv2.applyColorMap(cv2.convertScaleAbs(disp.squeeze(), alpha=0.01),cv2.COLORMAP_JET), [int(cv2.IMWRITE_PNG_COMPRESSION), 0])
if __name__ == '__main__':
parser = argparse.ArgumentParser()
parser.add_argument('--restore_ckpt', help="restore checkpoint", default='./pretrained_models/sceneflow/sceneflow.pth')
parser.add_argument('--save_numpy', action='store_true', help='save output as numpy arrays')
parser.add_argument('-l', '--left_imgs', help="path to all first (left) frames", default="./demo-imgs/leador/0.jpg")
parser.add_argument('-r', '--right_imgs', help="path to all second (right) frames", default="./demo-imgs/leador/1.jpg")
# parser.add_argument('-l', '--left_imgs', help="path to all first (left) frames", default="/data/Middlebury/trainingH/*/im0.png")
# parser.add_argument('-r', '--right_imgs', help="path to all second (right) frames", default="/data/Middlebury/trainingH/*/im1.png")
# parser.add_argument('-l', '--left_imgs', help="path to all first (left) frames", default="/data/ETH3D/two_view_training/*/im0.png")
# parser.add_argument('-r', '--right_imgs', help="path to all second (right) frames", default="/data/ETH3D/two_view_training/*/im1.png")
parser.add_argument('--output_directory', help="directory to save output", default="./demo-output/")
parser.add_argument('--mixed_precision', action='store_true', help='use mixed precision')
parser.add_argument('--valid_iters', type=int, default=32, help='number of flow-field updates during forward pass')
# Architecture choices
parser.add_argument('--hidden_dims', nargs='+', type=int, default=[128]*3, help="hidden state and context dimensions")
parser.add_argument('--corr_implementation', choices=["reg", "alt", "reg_cuda", "alt_cuda"], default="reg", help="correlation volume implementation")
parser.add_argument('--shared_backbone', action='store_true', help="use a single backbone for the context and feature encoders")
parser.add_argument('--corr_levels', type=int, default=2, help="number of levels in the correlation pyramid")
parser.add_argument('--corr_radius', type=int, default=4, help="width of the correlation pyramid")
parser.add_argument('--n_downsample', type=int, default=2, help="resolution of the disparity field (1/2^K)")
parser.add_argument('--slow_fast_gru', action='store_true', help="iterate the low-res GRUs more frequently")
parser.add_argument('--n_gru_layers', type=int, default=3, help="number of hidden GRU levels")
parser.add_argument('--max_disp', type=int, default=192, help="max disp of geometry encoding volume")
args = parser.parse_args()
Path(args.output_directory).mkdir(exist_ok=True, parents=True)
demo(args)
Imágenes de prueba de datos propios.
0.jpg, representa la imagen de la izquierda.

1.jpg, representa la imagen de la derecha

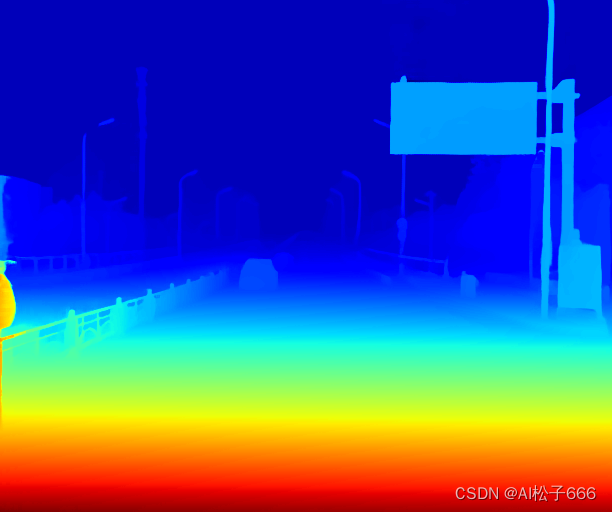
Resultados de la prueba