Annuaire d'articles
1. Cadre de navigation
La clé de la navigation est le positionnement du robot et la planification du chemin.
move_base : réalise une planification optimale du chemin dans la navigation du robot
amcl : réalise le positionnement du robot sur des cartes bidimensionnelles.
Sur la base des deux packages de fonctions ci-dessus, ROS fournit une série de boîtes de navigation complètes.
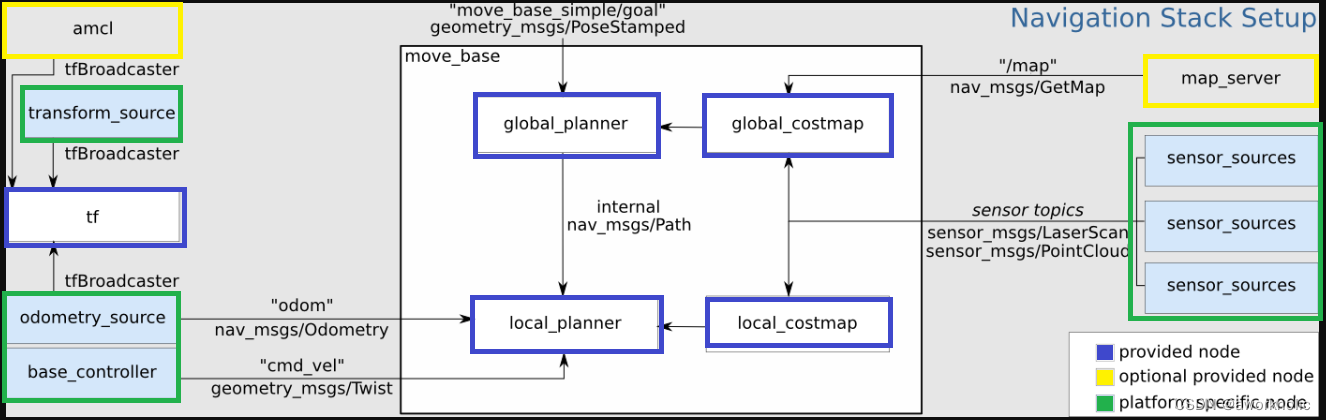
Le robot publie les informations nécessaires du capteur et la position cible de navigation, et ROS peut compléter la fonction de navigation. Dans ce cadre, le package de fonctions move_base fournit la principale interface d'exécution et interactive pour la navigation. Le package de fonctions amcl garantit l’exactitude du chemin et localise avec précision votre emplacement.
Premièrement, l’ensemble des fonctions de navigation collecte les informations des capteurs du robot pour éviter les obstacles en temps réel. Le robot publie des informations sensor_msgs/LaserScan ou des nuages de points 3D via ROS.
Deuxièmement, le package de fonctions de navigation publie nav_msgs/Od