Introducción al control de movimiento
- 1. Introducción
-
- 1.1 Descripción general
- 1.2 Arquitectura básica del control de movimiento
- 1.3 Funciones de control comunes
- 1.4 Clasificación de problemas en la investigación del control de movimiento.
- 1.5 Cuerpo de conocimientos
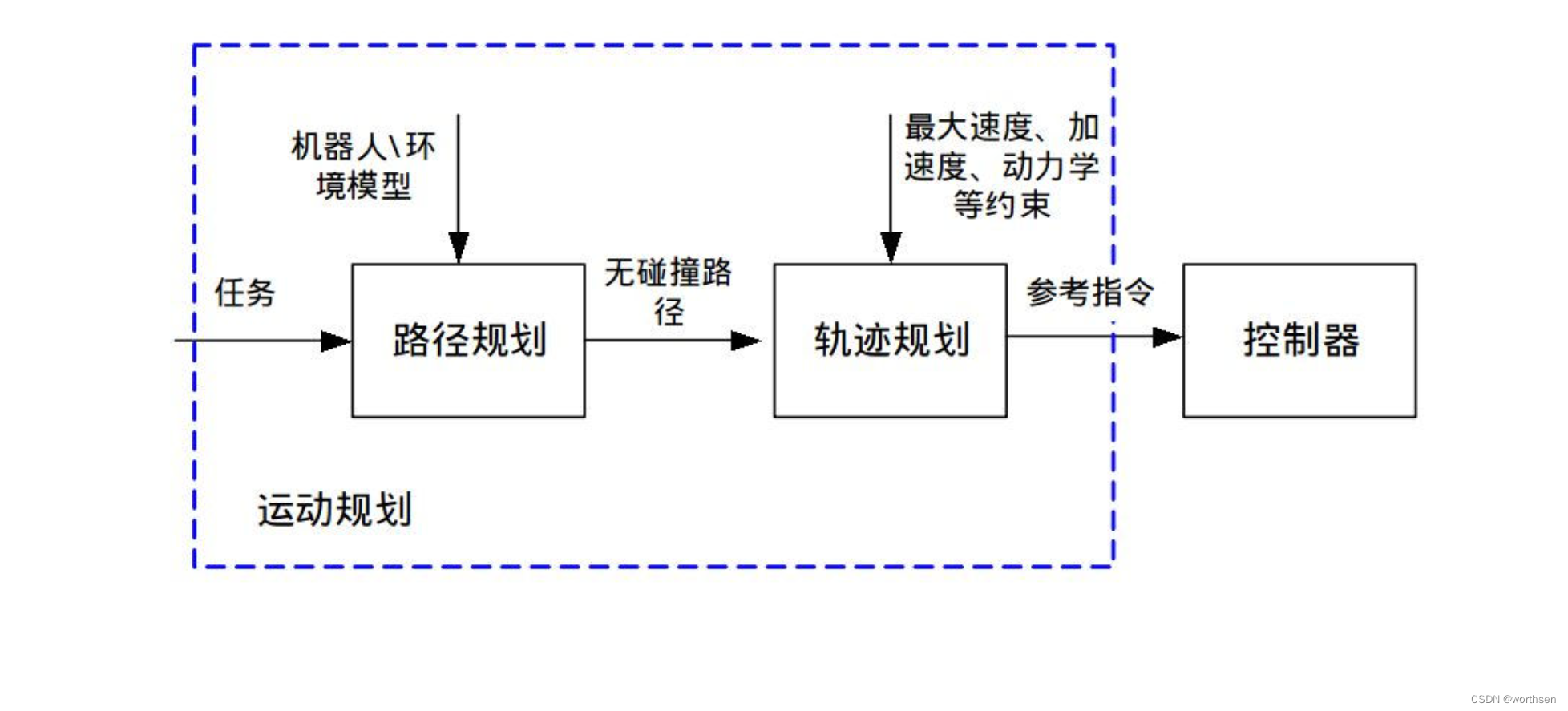
- 1.6 Diferencias y conexiones entre planificación de rutas y planificación de trayectorias
- 1.7 Sistema de control de movimiento
- 2 "Sistema de control de movimiento" [Editado por Banhua Li Changyou] Resumen
-
- 1. Introducción
- 2 Tecnología de controlador de movimiento
- 3 Tecnología de actuador
- 4 Tecnología de control de motores de CC
- 5 tecnología de control de motores de CA
- 6 Tecnología de control de servomotor (servomotor)
- 7 Tecnología de detección
- 8 ejemplos de aplicación
- Reponer
- referencia
1. Introducción
1.1 Descripción general
El control de movimiento (control de movimiento) es una parte de la tecnología de automatización, que se refiere a un sistema o subsistema que permite que la parte móvil del sistema se mueva de manera controlable.
La posición o velocidad de una máquina normalmente se controla mediante dispositivos como bombas hidráulicas, actuadores lineales o motores eléctricos como servos.
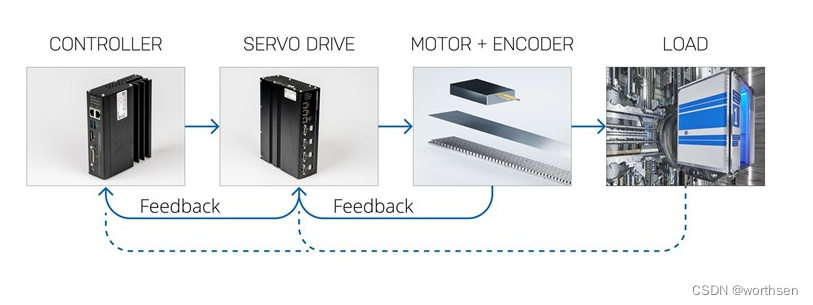
1.2 Arquitectura básica del control de movimiento
- El controlador de movimiento (controlador de movimiento) puede generar un objetivo de control (salida ideal o perfil de movimiento), o en un sistema de control de circuito cerrado, necesita cooperar con la retroalimentación de posición o velocidad para formar un control de retroalimentación [2]
- Un controlador o amplificador convierte la señal de control del controlador de movimiento en energía que se puede suministrar al actuador. Las unidades "inteligentes" más nuevas pueden utilizar la unidad para controlar la velocidad o la posición, por lo que el control puede ser más preciso.
- Un motor primario o actuador, como una bomba hidráulica, un cilindro hidráulico, un actuador lineal o un motor, es un dispositivo que realmente mueve un objeto.
- Si se trata de un control de retroalimentación cerrado, se requerirán muchos sensores (como codificadores rotatorios, resolutores o elementos Hall) para enviar la información de posición o velocidad del actuador al controlador o controlador para lograr el control de retroalimentación.
- Los elementos mecánicos que convierten la salida del actuador en la salida real deseada son engranajes, ejes de transmisión, husillos de bolas, correas de transmisión, varillajes y cojinetes lineales o giratorios.
1.3 Funciones de control comunes
- control de velocidad.
- Control de posición (punto a punto): existen varios métodos para calcular la trayectoria del movimiento. Por lo general, se basan en una distribución de velocidad del movimiento, como una distribución triangular, trapezoidal o en curva en S.
- Control de presión, fuerza o par.
- Control de impedancia: este tipo de control es adecuado para la interacción con el entorno y la manipulación de objetos, por ejemplo en robótica.
- Engranaje electrónico (o perfil de leva): La relación entre la posición del eje impulsado y la posición del eje impulsor se puede representar mediante una función matemática. Lo simple es que hay dos rodillos en un sistema, pero su velocidad debe mantener una cierta relación (es decir, engranaje electrónico). La situación de la leva electrónica es similar a la de una leva. La posición del eje impulsado es una función matemática de la posición del eje impulsor (por ejemplo, cuando el eje impulsor está de 150 a 180 grados, el eje impulsado gira de 0 a 30 grados, y cuando es de 180 a 210 grados, el eje impulsado gira de 30 grados a 0 grados, cuando el eje impulsor está en otras posiciones, el eje impulsado se mantiene en 0 grados).
1.4 Clasificación de problemas en la investigación del control de movimiento.
problema de cambio de ubicación
Se caracteriza por el cambio de la posición espacial del objeto controlado, lo que llamamos el primer tipo de problema de control de movimiento.
Para el primer tipo de problemas de control de movimiento, las características de movimiento del objeto controlado son: los cambios de posición espacial y la velocidad o aceleración del objeto controlado cambian durante el proceso de cambio de posición. La clave para resolver el primer tipo de problemas de movimiento es descomponer la trayectoria de movimiento del objeto controlado en los cambios de coordenadas del sistema de coordenadas espaciales de acuerdo con la trayectoria de movimiento espacial del objeto controlado de acuerdo con la teoría cinemática de Newton y la teoría básica del motor. arrastrando . Luego, al analizar el cambio de las coordenadas del sistema de coordenadas, se establece una ecuación que describe la trayectoria del movimiento ; según la teoría de la mecánica y cinemática newtoniana , el primer tipo de problema de control de movimiento se transforma en un problema de análisis de la relación entre varios parámetros como distancia, velocidad, aceleración y tiempo . Hay tres elementos para describir la trayectoria del movimiento: el punto inicial, el punto final y la curva que conecta los dos puntos ; el movimiento bidimensional en un plano es un caso especial del movimiento tridimensional en el espacio, y el unidimensional. El movimiento dimensional en línea recta es un caso especial de movimiento bidimensional en un plano.
Problema de cambio periódico de velocidad de rotación.
Debido a un cierto tipo de cantidad física (como temperatura, presión, flujo, par, etc.), la velocidad del motor se ve obligada a cambiar con el cambio de la carga, para cumplir con el propósito de temperatura, presión y flujo constantes. y torsión. Nos referimos a este tipo de problema de control de movimiento como el segundo tipo de problema de control de movimiento.
La segunda categoría de problemas de control de movimiento se deriva de la evolución de problemas de producción reales y específicos. Por ejemplo, en el problema de suministro de agua doméstico de una comunidad, dado que el consumo de agua de los usuarios cambia aleatoriamente, para garantizar la calidad del uso del agua por parte de los usuarios, es necesario mantener constante la presión del suministro de agua desde la perspectiva del control; La esencia es estudiar el volumen de ventilación del ventilador de circulación. La diferencia entre la temperatura interior y la temperatura establecida determina el volumen de ventilación del ventilador de ventilación. Cuanto mayor sea la diferencia de temperatura, mayor será el volumen de aire circulante del ventilador, es decir, el Cuanto mayor sea la velocidad del motor, cuanto menor sea la diferencia de temperatura, menor será el volumen de aire circulante requerido y menor será la velocidad del motor. A partir de los requisitos del segundo tipo de problemas de movimiento para un sistema de control, el control de este tipo de objetos a menudo está asociado con algunas cantidades físicas específicas (temperatura, presión, flujo, etc.), cuyo requisito previo es mantener la condición física. cantidad constante o seguir los cambios del Reglamento. A través del análisis anterior, se encuentra que estos requisitos pueden establecer una relación funcional con la velocidad del motor, por lo que el segundo tipo de problema de control de movimiento se transforma en un problema de control en tiempo real de la velocidad del motor. A este tipo pertenecen cargas como ventiladores, bombas de agua y compresores de aire acondicionado que se utilizan ampliamente en la producción industrial y agrícola y en la vida diaria de las personas. Según estadísticas relevantes, este tipo de carga representa entre el 50% y el 60% del consumo energético de toda la producción industrial. Dado que el control de bombas de agua, ventiladores y motores de compresores es unidireccional y periódico, este tipo de problema se puede resumir como un problema de control de rotación periódico del control de movimiento de un solo eje.
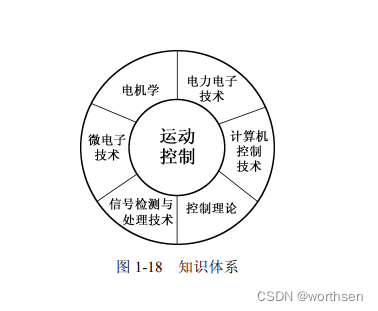
1.5 Cuerpo de conocimientos
1.6 Diferencias y conexiones entre planificación de rutas y planificación de trayectorias
1.7 Sistema de control de movimiento
2 "Sistema de control de movimiento" [Editado por Banhua Li Changyou] Resumen
1. Introducción
1.1 Problemas en la investigación del control de movimiento
1.1.1 El primer tipo de problema de control de movimiento
Cualquier sistema de control de movimiento en el que la posición espacial o la trayectoria del objeto controlado cambie con el movimiento pertenece al primer tipo de sistema de control de movimiento.
Debido a que el primer tipo de control de movimiento sigue completamente las leyes de la mecánica y los principios cinemáticos de Newton en teoría, para facilitar el análisis y el análisis del primer tipo de problemas de control de movimiento, transformamos el primer tipo de problemas de control de movimiento en problemas físicos de cinemática newtoniana. . Transformar la investigación del objeto controlado en la relación entre el desplazamiento, velocidad y aceleración del objeto controlado en el sistema de coordenadas cartesiano y el tiempo de movimiento.
El núcleo del primer tipo de control de movimiento es estudiar la trayectoria de movimiento del objeto controlado, analizar la relación entre la trayectoria del movimiento, la velocidad del movimiento, la aceleración (fuerza o par) del objeto en movimiento y el tiempo, y utilizar la ley de Newton para establecer una ecuación de solución para buscar un método de control y una estrategia de control rápidos, estables y precisos. El primer tipo de problemas de control de movimiento puede utilizar puntos característicos de curvas típicas para describir su trayectoria de posición o trayectoria de velocidad, por lo que la investigación de la trayectoria de movimiento consiste esencialmente en analizar los puntos característicos de varias trayectorias de movimiento y descubrir su regularidad. Los problemas típicos de movimiento del primer tipo son los siguientes.
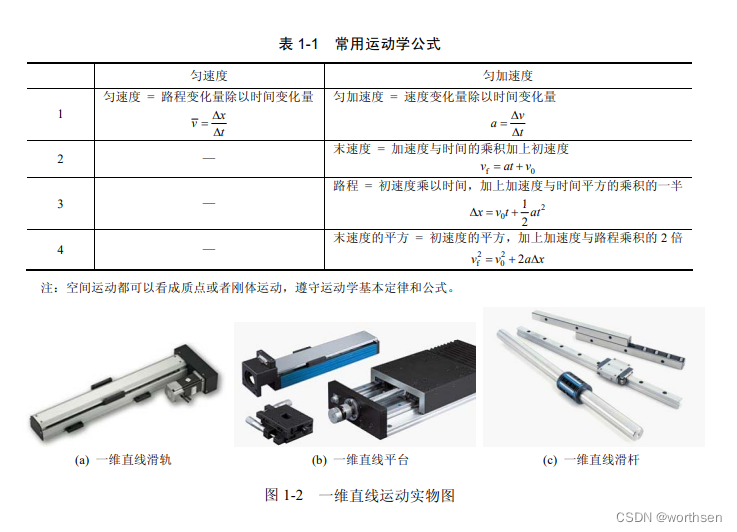
1. Movimiento unidimensional
El movimiento unidimensional se caracteriza por una forma de movimiento muy simple. Sus formas de movimiento básico se dividen en dos categorías: una es movimiento lineal, la otra es movimiento giratorio; además, también puede ser un compuesto de los dos movimientos básicos, como se muestra en la Figura 1-1.

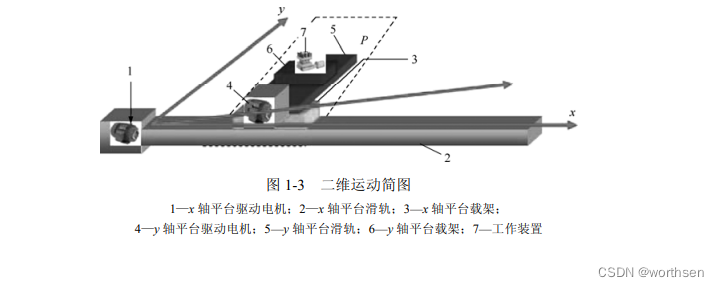
2. Movimiento bidimensional
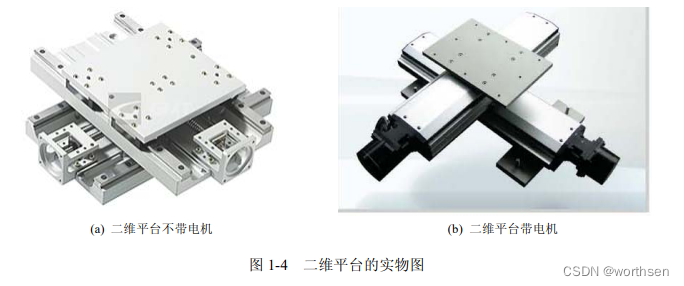
Una plataforma de movimiento bidimensional se forma conectando verticalmente dos plataformas de movimiento lineal unidimensional. Obviamente, el movimiento unidimensional es un caso especial del movimiento bidimensional, y el movimiento bidimensional es la planarización del movimiento lineal unidimensional y es la extensión y expansión de la trayectoria unidimensional. La plataforma de movimiento bidimensional se compone de dos plataformas unidimensionales, cada una de las cuales representa un eje de coordenadas, y la plataforma que coincide con el eje x del sistema de coordenadas se define como el eje x, y su cambio de trayectoria es el cambio de las coordenadas del eje x, el otro La plataforma coincide con el eje y y se define como el eje y. La trayectoria del movimiento bidimensional puede ser una línea recta o una curva, y la trayectoria curva se obtiene mediante el movimiento compuesto de la plataforma lineal unidimensional que constituye la plataforma bidimensional. La trayectoria del movimiento bidimensional es una curva plana y una línea recta es su caso especial. Según la concordancia del sistema de coordenadas del plano, el análisis de la trayectoria del movimiento bidimensional se transforma en el análisis de la curva geométrica plana de la coordenada del plano xy. La Figura 1-3 es un diagrama esquemático de la composición de una plataforma bidimensional. Hay un sistema de coordenadas xy en la figura, que se realiza mediante dos plataformas lineales unidimensionales independientes.
La figura 1-5 muestra otra forma de movimiento plano: el movimiento compuesto.
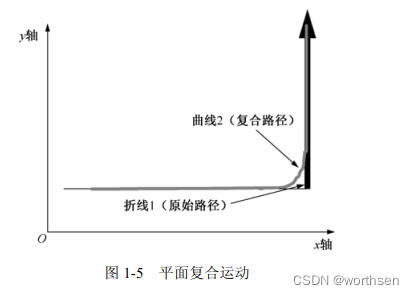
Para recoger y colocar, posicionamiento de sondas y entrega de artículos, que se utilizan ampliamente en el proceso de producción real, una de las formas efectivas de mejorar su eficiencia es el movimiento compuesto.
图 1-7 所示的是平面运动的轮廓线控制模式。轮廓线由一系列特征点组成,系统的运动特征是按照轮廓线运动。其方法是把轮廓的特征点存放到一组缓冲区中,并保持相关数据,然后通过这些点建立一条光滑的路径(或者称为样条曲线),该方法的优点是可以确保经过了每一个特征点。
除了把平面运动看成一个质点平面运动之外,还有一种情况就是把运动对象看成一个刚体,刚体是由一系列质点组成的。图 1-8 所示的是刚体的平面运动图。
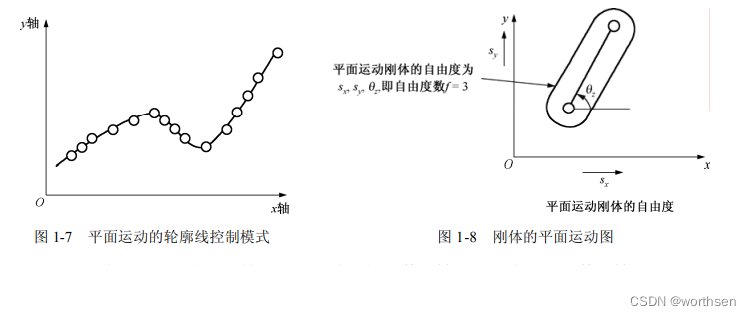
平面刚体运动可能的运动情况是:刚体能够沿着 x 轴平动,也可以沿着 y 轴平移,还可以以一个端点作为原点做旋转运动,是典型的三自由度运动。
3.三维运动
三维运动从总的运动形态可以分成两大类:三维质点运动和三维刚体运动。三维运动是二维运动的空间化,二维运动是三维运动的一个特例。三个一维运动单元的合成就是典型的三维运动,每一维度的运动形式可以是平动(位移),也可以是旋转,其运动轨迹是空间曲线。
-
三维质点运动
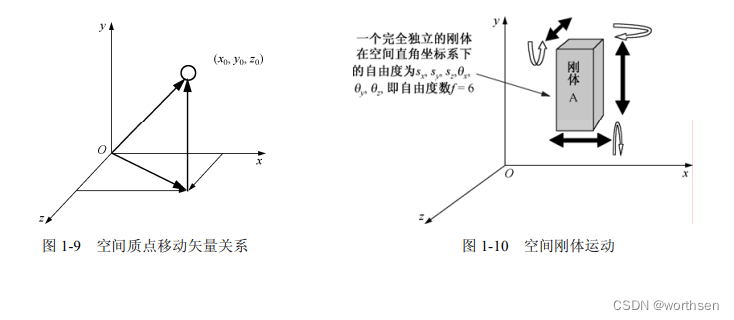
三维质点运动的移动规律与平面质点移动规律无差异,也有三类形式:第一类为空间点对点的移动,可以是直线移动,也可以是旋转运动;第二类为复合移动,是在三个运动轴按照一定的复合比例所做的运动;第三类为空间轮廓线运动。图 1-9 所示的是典型的空间质点移动矢量关系也就是从坐标原点到空间点(x0, y0, z0)的笛卡儿坐标关系。三维空间质点移动的轨迹问题还可以转化为复合移动问题和轮廓线追踪问题。 -
Movimiento tridimensional de un cuerpo rígido
La figura 1-10 muestra un cuerpo rígido A colocado en un sistema de coordenadas espaciales tridimensional. En comparación con la figura 1-8, el movimiento del cuerpo rígido A en la figura 1-10 es más complejo que el del cuerpo rígido plano bidimensional. Como se mencionó anteriormente, el cuerpo rígido plano tiene sólo tres grados de libertad, mientras que el cuerpo rígido espacial puede trasladar sx a lo largo del eje x, y también puede trasladar sy a lo largo del eje y, y puede trasladar sz a lo largo del eje z. El cuerpo rígido A también puede realizar un movimiento de rotación θx alrededor del eje x, de manera similar, también puede realizar un movimiento de rotación alrededor de los ejes y y z. Por lo tanto, el cuerpo rígido espacial A tiene grados de libertad de traslación a lo largo de los ejes x, y, z y tres grados de libertad de rotación, por lo que el cuerpo rígido espacial tiene 6 grados de libertad.
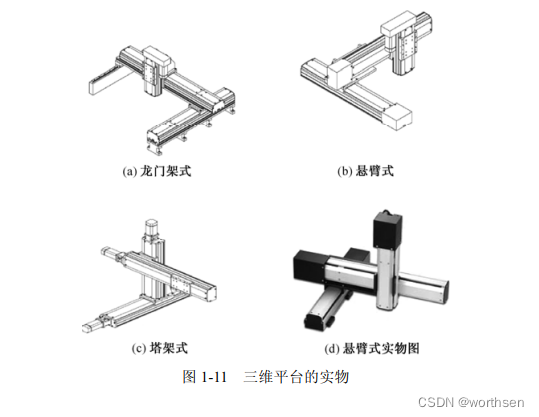
La Figura 1-11 muestra las cuatro plataformas 3D en especie. Entre ellos, la Figura 1-11(a) es una plataforma tridimensional con una estructura de pórtico, que se caracteriza por una fuerza uniforme, que es la forma más común de aplicación; la Figura 1-11(b) es una estructura de viga en voladizo, que se usa a menudo cuando La estructura adoptada cuando el espacio es limitado, obviamente, la fuerza de este mecanismo es desigual; la Figura 1-11© es una estructura de torre; la Figura 1-11(d) es un mapa físico de tipo voladizo.
4. Ejes del sistema de control de movimiento.
- Eje de movimiento
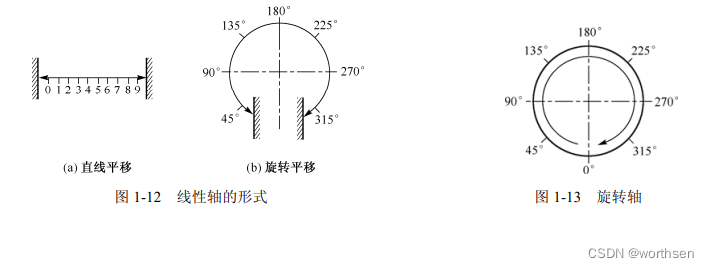
Por lo general, definimos un objeto que se mueve en un segmento de línea recta o un objeto que gira en una dirección de rotación predeterminada como eje de movimiento. Los ejes generalmente se dividen en dos categorías: ejes lineales y ejes giratorios. - Eje lineal
La definición de un eje lineal es: solo la posición inicial y la posición final, y la posición real actual del eje debe estar entre su posición inicial y la posición final, como se muestra en la Figura 1-12. La Figura 1-12 muestra dos representaciones. La figura 1-12 (a) es una traslación en línea recta, el punto izquierdo de la figura es el punto inicial y el punto derecho es el punto final. La Figura 1-12 (b) es un movimiento de rotación. De manera similar, el punto izquierdo es el punto inicial y el punto derecho es el punto final. - Eje giratorio
Un eje giratorio periódico realiza un movimiento circular, su punto inicial es 0° y luego de completar un ciclo vuelve nuevamente a 0°. Esta situación también se conoce como módulo, como se muestra en la Figura 1-13.
1.1.2 El segundo tipo de problemas de control de movimiento.
La segunda categoría de problemas de control de movimiento está relacionada con una gran cantidad de problemas reales de producción y vida útil, como ventiladores, bombas de agua, presión y temperatura. Según las características de accionamiento de ventiladores, bombas de agua, etc., el segundo tipo de problemas de control de movimiento se puede transformar en problemas de control de rotación periódicos de control de movimiento de un solo eje.
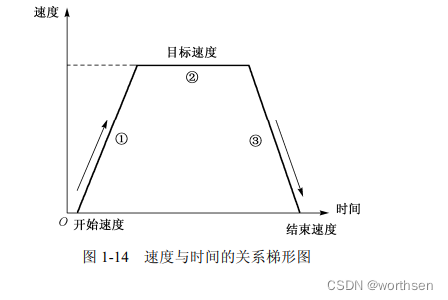
Para un problema de control de rotación periódica de un solo eje, consta de tres elementos: velocidad inicial, velocidad objetivo y velocidad final. La Figura 1-14 muestra un diagrama de escalera de la relación entre velocidad y tiempo. El trapezoide se compone de tres secciones: ① la etapa de aceleración desde la posición de velocidad inicial; ② la etapa de velocidad constante, la característica típica de esta etapa es que la velocidad funciona de acuerdo con la velocidad objetivo; ③Etapa de desaceleración, en esta etapa, la velocidad caerá a cero y alcanzará la posición de velocidad final.
1.2 Sistema de control de movimiento
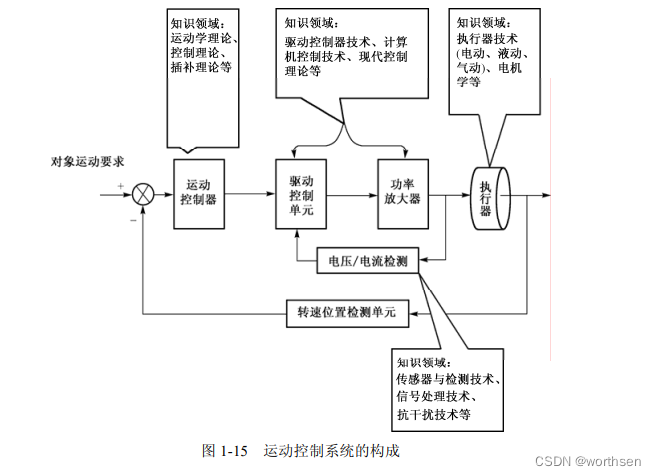
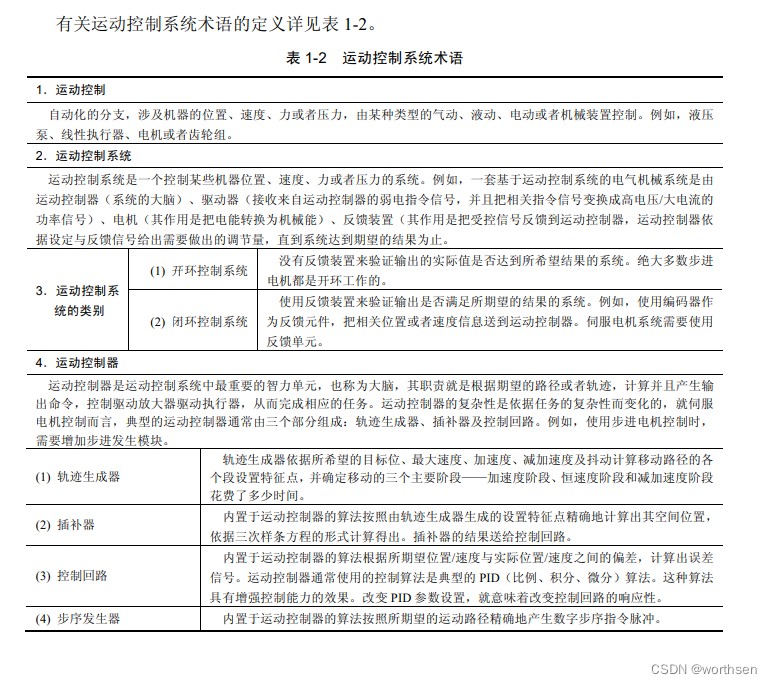
El sistema de control de movimiento es un sistema que configura un controlador razonable para accionar el motor de ejecución para completar los requisitos de trayectoria de movimiento correspondientes de acuerdo con los requisitos de la trayectoria de movimiento del objeto específico y sus condiciones de carga. Un sistema de control de movimiento típico consta de las siguientes partes: controlador de movimiento, actuador de accionamiento, unidad de retroalimentación de movimiento, etc., como se muestra en la Figura 1-15. Entre ellos, el controlador de movimiento se compone principalmente de tres elementos principales: generador de trayectoria, interpolador y bucle de control .
La Figura 1-15 no es sólo un reflejo de la composición del sistema, sino también un reflejo del dominio de conocimiento involucrado en cada unidad de elemento. Entre ellos, el campo de conocimiento del controlador de movimiento es: teoría cinemática, teoría de control, teoría de interpolación, etc. Los campos de conocimiento de la unidad de control de accionamiento y del amplificador de potencia incluyen: tecnología de controlador de accionamiento, tecnología de control por ordenador, teoría de control moderna, etc. Los campos de conocimiento de los actuadores son: tecnología de actuadores (eléctricos, hidráulicos, neumáticos), electromecánicos, etc. Los campos de conocimiento de la unidad de detección de posición de velocidad y la detección de voltaje/corriente son: tecnología de sensores y detección, tecnología de procesamiento de señales, tecnología antiinterferencias, etc.
1.3 Terminología del sistema de control de movimiento
1.4 La historia del desarrollo y la tendencia de desarrollo futuro del sistema de control de movimiento.
1. Historia del control de movimiento y la tecnología de accionamiento.
| etapa de desarrollo | Clasificación de tecnología | Principales características técnicas (representantes típicos) |
|---|---|---|
| más temprano | Era analógica (era paso a paso) | Controlador de pasos + motor paso a paso + motor de pulso electrohidráulico |
| década de 1970 | Era analógica CC | Controlador basado en tecnología de microprocesador + motor DC de gran inercia |
| década de 1980 | Era analógica de CA | Controlador basado en microprocesador + servosistema analógico de CA |
| década de 1990 | primeras etapas de la digitalización | Control mixto digital/analógico/pulso, controlador de computadora general + servosistema de CA digital de control de pulso |
| Siglo XXI hasta la actualidad | Era totalmente digital | Controlador basado en PC + comunicación digital en red + servosistema digital |
2. Problemas actuales en la tecnología de control de movimiento
- Problemas en el modo de control
(1) Existen dobles cuellos de botella en el procesamiento e intercambio de información de pulsos, que no pueden satisfacer las necesidades del control de alta velocidad.
(2) El control de trayectoria híbrido no puede lograr un control de alta precisión.
(3) La confiabilidad de la transmisión del intercambio de información sin protocolo es baja, lo que restringe la mejora del rendimiento integral del sistema.
(4) La escala del hardware es grande, lo que afecta la mejora de la confiabilidad del sistema.
(5) Los costos de desarrollo, producción y uso son altos y la escalabilidad es pobre.
2 Tecnología de controlador de movimiento
2.1 Introducción al sistema de control de movimiento
La tarea es el requisito del objeto específico en el sistema de movimiento, y su forma puede ser la trayectoria, el incremento o desplazamiento de posición, la velocidad de movimiento o la tasa de cambio de velocidad: aceleración, fuerza motriz o par motor.
2.2 Principio básico del controlador de movimiento
2.2.1 La composición del controlador de movimiento.
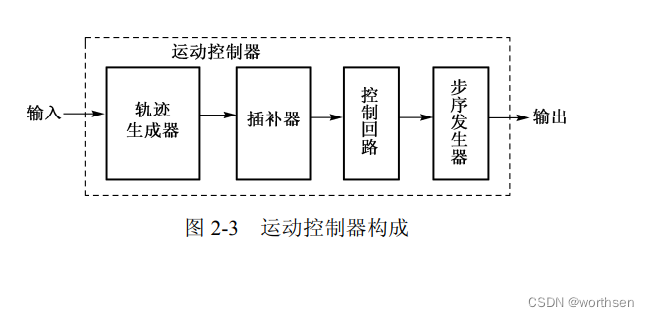
El controlador de movimiento consta de cuatro partes: generador de trayectoria, interpolador, bucle de control y generador de secuencia, como se muestra en la Figura 2-3. El principio básico es: de acuerdo con las necesidades de la tarea, el controlador de movimiento primero calcula la trayectoria ideal deseada por la tarea mediante el generador de trayectoria, y el interpolador calcula la unidad de accionamiento de acuerdo con el estado real de la unidad de retroalimentación de posición o velocidad y los requisitos del generador de trayectoria. El comando que se ejecutará a continuación se entrega al bucle de control para un control preciso. Si se trata de un motor paso a paso, otra parte es el generador de secuencia de pasos, que genera además una secuencia de fases de control y pulsos de acuerdo con las instrucciones de control del bucle de control para lograr el propósito de controlar el objeto en movimiento.
2.2.2 Generador de trayectoria
La función principal del generador de trayectoria es generar la trayectoria de movimiento para el sistema de acuerdo con los requisitos de la tarea de movimiento , como configuración de entrada del interpolador del controlador del sistema de movimiento. La responsabilidad del generador de trayectoria es transformar la entrada del controlador de movimiento en la trayectoria ideal que espera el sistema. La trayectoria del movimiento es la tarea de movimiento que el sistema de movimiento debe completar. En lo que respecta al controlador de movimiento, el generador de trayectoria es uno de los tres componentes principales del controlador de movimiento. El rendimiento del generador de trayectoria juega un papel vital en el controlador de movimiento. La trayectoria de la que estamos hablando aquí es una trayectoria en un sentido amplio, que puede ser una trayectoria o una trayectoria de contorno, una trayectoria de velocidad o una trayectoria de aceleración. Una trayectoria en sentido estricto se refiere específicamente a un camino o una trayectoria de contorno.
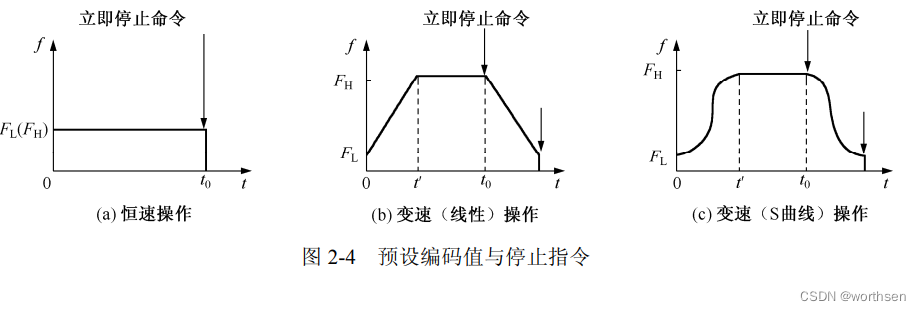
下面,通过图 2-4 说明轨迹问题。图 2-4 中有三个子图,分别表示三种停止操作过程。图中所示的速度变化曲线就是一条速度运行轨迹。由于电机的转速与供电电源频率成正比,因此尽管纵坐标表示的是频率,实质上还是电机的转速。其中,FL 表示电机最低转速值,FH表示电机最高转速值,横坐标 t 表示时间,t0 表示立即停止命令发出的时刻,即运动控制器在 t0 时刻向电机驱动单元发出停止信号。很显然,从图 2-4(a)看出,系统恒速度运行的特征是最低速度与最高速度相同,即 FL=FH,当 t≥t0 时,频率 FL(FH) = 0,表示电机转速从某一个常数值立刻下降到 0。图 2-4(b)所示的是一条典型的速度梯形曲线,电机最低速度是 FL,然后经过t′时间达到最高速度 FH,这个时段加速度是常数;在 t0时刻到来之前,系统按照 FH运行;当 t = t0时,又经过t′时段,电机转速将由 FH降低到 FL,这个时段减加速度也是一个常数。图 2-4©所示的是一条典型的速度 S 曲线,系统从 t = 0 时刻开始,初始速度是 FL,经过t′时间段,系统稳态速度变为 FH,速度的变化率是变化的,不是一个定值;当t′ ≤t < t0 时,系统速度为 FH,当 t≥t0时,系统速度由 FH变化为 FL。速度变化遵循 S 曲线。图 2-4 所示的三种操
作模式可以采用编码方式预先内置到控制器中。例如,恒速操作的编码为 001,变速(线性)操作的编码为 002,变速(S 曲线)操作的编码为 003。控制编程时,可以通过提前往控制器之中预设编码值来选择停止操作的方式。
1.点对点运动轨迹
虽然有很多种运动轨迹可以选择,但是最简单、最直接的运动曲线是点对点运动轨迹。
下面举一个简单的例子,图 2-5 所示的就是一个点对点的运动轨迹。由图可知,运动的起点从 20°开始,运动的终点到 100°结束。通常情况下,就位置或者速度系统而言,运动控制器更常用的方法是用编码器脉冲数来取代角度。点对点运动的应用范围十分宽广,包括各种大型医疗自动化诊疗设备,如 CT 机、MR 核磁共振等;机械制造业使用的各类加工中心、数控机床等;科学研究领域的自动检测与定位仪器;军事领域中的自动定位跟踪、自动瞄准系统等;民用自动设施,如电梯等(需要注意的是,自动扶梯不是点对点运动方式)。点对点运动方式的特点是运动需求描述简单,控制容易。对于点对点运动方式,负载速度从零开始,加速到设定速度,稳定运行,然后减速至停止,此时被控对象到达目标位置——终点。在一个典型的点对点运动中,速度从零开始到零结束,并启动加速和停止减速都是平滑的。
Hay dos curvas de trayectoria de velocidad más utilizadas para el movimiento punto a punto, a saber, la curva S y la curva trapezoidal . El principal método de investigación del movimiento punto a punto es el método de descripción de valores propios , y su principal contenido de investigación es la curva característica de la trayectoria de la velocidad del movimiento y la curva característica de la trayectoria de la aceleración del movimiento . Como se muestra en la Figura 2-6(a), la curva S se compone de 7 segmentos de series de tiempo de movimiento diferentes, y hay 7 segmentos de series de tiempo tanto en la curva de velocidad como en la curva de aceleración. Para estas 7 series de tiempo, el objeto en movimiento en la serie de tiempo I comienza a moverse desde el reposo y la velocidad aumenta suavemente, mientras que la aceleración aumenta linealmente hasta la aceleración máxima; la velocidad del objeto en movimiento en la serie de tiempo II aumenta linealmente, mientras que la la aceleración se mantiene en la aceleración máxima hasta el final del segmento de secuencia II; en el segmento de secuencia III, la velocidad continúa aumentando suavemente hasta la velocidad más alta y la aceleración disminuye linealmente hasta que la aceleración es cero; en el segmento de secuencia IV, la velocidad permanece constante hasta el final del segmento de secuencia IV, momento en el cual la velocidad alcanza el valor máximo, la aceleración es cero. Los segmentos de sincronización V, VI y VII son modos de desaceleración, que son completamente simétricos a los modos de aceleración de los segmentos de sincronización I, II y III.
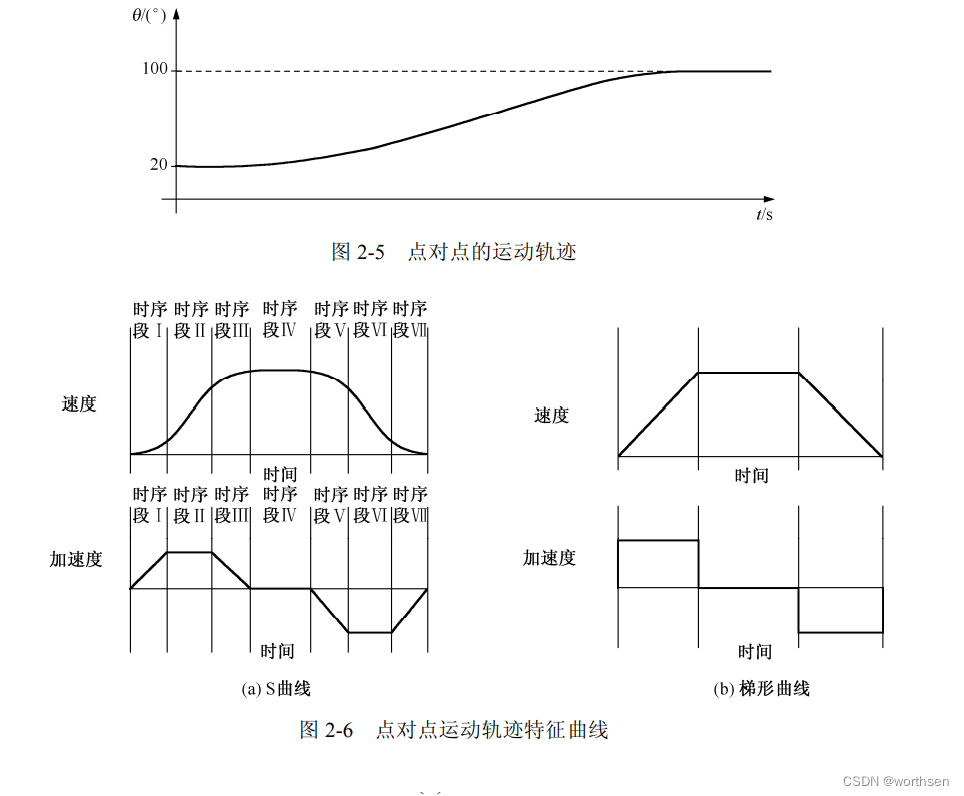
La curva trapezoidal consta de tres segmentos de series de tiempo, como se muestra en la Figura 2-6(b). Obviamente, la curva trapezoidal es un subconjunto de la curva S. En comparación con la curva S, solo tiene tres secciones de series de tiempo: serie de tiempo II (aceleración constante), serie de tiempo IV (velocidad constante) y serie de tiempo VI ( desaceleración constante).
Comparando la curva S con la curva trapezoidal, se puede ver que la suavidad de la curva de velocidad de la curva S es mucho mejor que la de la curva trapezoidal; al mismo tiempo, también se encuentra que la curva de aceleración de la curva S es continua, mientras que la curva de aceleración de la curva trapezoidal es escalonada. Hay puntos de mutación en la función de salto, lo que muestra que la estabilidad de la primera es mucho mejor que la de la segunda. Por lo tanto, para ocasiones que requieren una alta estabilidad de movimiento, se puede preferir la curva en S.
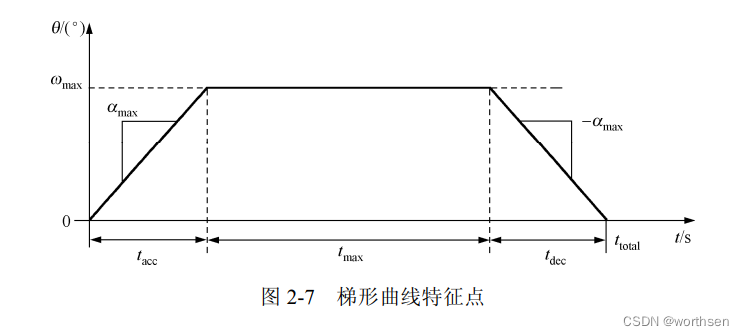
La Figura 2-7 muestra los puntos característicos de la curva trapezoidal, donde ω max ω_{max}Vayamáx _es la velocidad máxima, α max α_{max}amáx _es la aceleración máxima, tacc t_{acc}tun cces el tiempo de aceleración, tdec t_{dec}tdiciembre _es el tiempo de desaceleración, tmax t_{max}tmáx _es el tiempo de velocidad máxima, ttotal t_{total}tt o t a lPara todo el tiempo de ejercicio, existe la siguiente fórmula.
tacc = tdec = ω max α max (2-1) t_{acc}=t_{dec}=\dfrac{\omega_{max}}{\alpha_{max}} \tag{2-1}tun cc=tdiciembre _=amáx _Vayamáx _( 2-1 )
ttotal = tacc + tmax + tdec (2-2) t_{total}=t_{acc}+t_{max}+t_{dec} \tag{2-2}tt o t a l=tun cc+tmáx _+tdiciembre _( 2-2 )
θ = 1 2 tacc ω max + tmax ω max + 1 2 tdec ω max = ω max ( tacc 2 + tmax + tdec 2 ) (2-3) \theta=\frac{1}{2} t_{acc}\omega_{max}+t_{max}\omega_{max}+\frac{1}{2}t_{dec}\omega_{max}=\omega_{max}(\frac{t_{acc) }}{2}+t_{max}+\frac{t_{dec}}{2}) \tag{2-3}i=21tun ccVayamáx _+tmáx _Vayamáx _+21tdiciembre _Vayamáx _=Vayamáx _(2tun cc+tmáx _+2tdiciembre _)( 2-3 )
tmax = ∣ θ ∣ ω max − tacc 2 − tdec 2 (2-4) t_{max}=\frac{|\theta|}{\omega_{max}}-\frac{t_{acc }}{2}-\frac{t_{dec}}{2} \tag{2-4}tmáx _=Vayamáx _∣ θ ∣−2tun cc−2tdiciembre _( 2-4 )
Tenga en cuenta que si el tiempo calculado por la fórmula (2-4) es un valor negativo, significa que la velocidad real no puede alcanzar la velocidad máxima y la curva de velocidad no es un trapezoide, sino un triángulo. Las ecuaciones (2-1) a (2-4) son las expresiones relacionales básicas de los puntos característicos de la curva de velocidad trapezoidal.
El defecto de la curva trapezoidal es que si la aceleración y desaceleración son valores constantes, la carga vibrará en las secciones de aceleración y desaceleración . En algunas ocasiones, se espera que esta fluctuación se minimice, por lo que la curva polinómica juega ese papel. La Figura 2-9 muestra una curva polinómica típica. Se puede ver en la figura que en la sección de aceleración y la sección de desaceleración, la velocidad está determinada por el polinomio ω ( t ) = A t 2 + B t + C ω(t)=At^2 + Bt + Cω ( t )=en _2+BT+dijo C. La característica más importante de esta curva polinómica es una velocidad suave, buena estabilidad y ningún problema de fluctuación de carga.
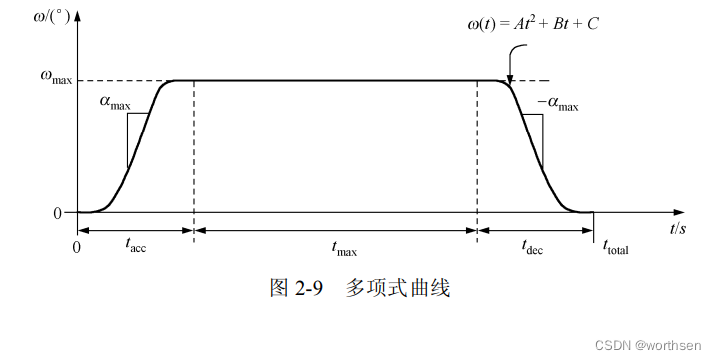
Para la curva polinómica que se muestra en la Figura 2-9, conocemos cuatro valores de parámetrosθ inicio, θ fin, ω máx, α máx, θ_inicio, θ_fin, ω_max, α_max,icomienzo _ _ _ _、yofinal _ _、ohmáx _、unmáx _, es decir, la posición inicial, la posición final, la velocidad angular máxima y la aceleración angular máxima, y la condición de restricción del polinomio de velocidad que se muestra en la Figura 2-9 es ω ( 0 ) = 0 ω (
tacc 2 ) = ω máx 2 ddt ω ( 0 ) = 0 ddt ω ( tacc 2 ) = α máx \begin{align} \omega(0) & = 0 \notag \\ \omega(\frac{t_{acc}}{2}) & = \frac{\omega_ {max}}{2} \notag \\ \frac{d}{dt}\omega(0) & = 0 \notag \\ \frac{d}{dt}\omega(\ frac{t_{acc}} {2}) & = \alpha_{max} \notag \end{align}o ( 0 )oh (2tun cc)d treo ( 0 )d treoh (2tun cc)=0=2Vayamáx _=0=amáx _
Por tanto, de acuerdo con las restricciones anteriores, se pueden calcular los coeficientes A, B y C del polinomio.
0 = A ⋅ 0 2 + B ⋅ 0 + C ⇒ C = 0 0 = 2 A ⋅ 0 + B ⇒ B = 0 ω max = A tacc 2 ⇒ A = ω maxtacc 2 \begin{align} 0 = A 0 ^ 2 + B 0 + C & \Rightarrow C = 0 \notag \\ 0 = 2 A 0 + B & \Rightarrow B = 0 \notag \\ \omega_{max} = At^2_{acc} & \ Rightarrow A = \frac{\omega_{max}}{t^2_{acc}} \notag \\ \end{align}0=Un ⋅02+segundo ⋅0+C0=2A⋅ _ _0+BVayamáx _=en _un cc2⇒C=0⇒B=0⇒A=tun cc2Vayamáx _
故
A = ω maxtacc 2 = α max 2 tacctacc = 2 ω max α max \begin{align} A & = \frac{\omega_{max}}{t^2_{acc}} = \frac{\alpha_{max) }}{2t_{acc}} \notag \\ t_{acc} & = \frac{2\omega_{max}}{\alpha_{max}} \notag \\ \end{align}Atun cc=tun cc2Vayamáx _=2t_ _un ccamáx _=amáx _2o _máx _
则
A = α max 2 tacc = α max 2 ( 2 ω max α max ) = α max 2 4 ω max A = \frac{\alpha_{max}}{2t_{acc}} = \frac{\alpha_{max }}{2(\frac{2\omega_{max}}{\alpha_{max}})} = \frac{\alpha^2_{max}}{4\omega_{max}}A=2t_ _un ccamáx _=2 (amáx _2o _máx _)amáx _=4 omáx _amáximo _2
Entonces, la ecuación de la primera curva descrita en la Figura 2-9 se puede obtener como
ω ( t ) = α max 2 4 ω maxt 2 0 ≤ t < tacc 2 (2-9) \omega(t) = \ frac{ \alpha^2_{max}}{4\omega_{max}}t^2 \qquad 0 \leq t < \frac{t_{acc}}{2} \tag{2-9}ω ( t )=4 omáx _amáximo _2t20≤t<2tun cc( 2-9 )
同理,第二段曲线的方程为
ω ( t ) = ω max − α max 2 4 ω max ( tacc − t ) 2 ω ( t ) = ω max − α max 2 4 ω max ( t 2 − 2 tacct + tacc 2 ) tacc 2 ≤ t < tacc \begin{align} \omega(t) & = \omega_{max} - \frac{\alpha^2_{max}}{4\omega_{max }}(t_{acc} - t)^2 \notag \\ \omega(t) & = \omega_{max} - \frac{\alpha^2_{max}}{4\omega_{max}}(t ^2 -2t_{acc}t + t_{acc}^2) \qquad \frac{t_{acc}}{2} \leq t < t_{acc} \tag{2-10} \\ \end{align }ω ( t )ω ( t )=Vayamáx _−4 omáx _amáximo _2( tun cc−t )2=Vayamáx _−4 omáx _amáximo _2( t2−2t_ _un cct+tun cc2)2tun cc≤t<tun cc( 2-10 )
La distancia del primer tramo de la curva (tramo de aceleración) es
θ acc = ∫ 0 tacc 2 α max 2 4 ω maxt 2 dt + ∫ tacc 2 tacc ( ω max − α max 2 4 ω max ( t 2 − 2 tacct + tacc 2 ) ) dt = α max 2 12 ω maxt 3 ∣ 0 tacc 2 + ( ω maxt − α max 2 4 ω max ( t 3 3 − tacc 2 + tacc 2 t ) ) ∣ tacc 2 tacc = α max 2 12 ω maxtacc 3 8 + ω maxtacc − α max 2 4 ω máx ( tacc 3 3 − tacc 3 + tacc 3 ) − ω maxtacc 2 + α máx 2 4 ω máx ( tacc 3 24 − tacc 3 4 + tacc 3 2 ) = α máx 2 96 ω maxtacc 3 + ω máx 2 tacc 2 − α max 2 12 ω maxtacc 3 − 7 α 2 max 96 ω maxtacc 3 = − 14 α max 2 96 ω maxt 3 + ω maxtacc 2 \begin{align} \theta_{acc} & = \int_0^{\frac{ t_{acc}}{2}} \frac{\alpha^2_{max}}{4\omega_{max}}t^2dt + \int_{\frac{t_{acc}}{2}}^{t_ {acc}}(\omega_{max} - \frac{\alpha^2_{max}}{4\omega_{max}}(t^2 -2t_{acc}t + t_{acc}^2))dt \notag \\ & = \frac{\alpha^2_{max}}{12\omega_{max}}t^3 \Big \vert _0^{ \frac{t_{acc}}{2}} +(\omega_{max}t - \frac{\alpha^2_{max}}{4\omega_{max}}(\frac{t^3}{3 } - t_{acc}t^2 + t^2_{acc}t)) \Big \vert ^{t_{acc}}_{\frac{t_{acc}}{2}} \notag \\ & = \frac{\alpha^2_{max}}{12 \omega_{max}} \frac{t^3_{acc}}{8} + \omega_{max}t_{acc} - \frac{\alpha^2_ {max}}{4\omega_{max}}(\frac{t^3_{acc}}{3} - t^3_{acc} + t^3_{acc}) - \omega_{max}\frac{ t_{acc}}{2} + \frac{\alpha^2_{max}}{4\omega_{max}}(\frac{t^3_{acc}}{24} - \frac{t^3_{ acc}}{4} + \frac{t^3_{acc}}{2}) \notag \\ & = \frac{\alpha^2_{max}}{96\omega_{max}}t^3_{ acc} + \frac{\omega^2_{max}t_{acc}}{2} - \frac{\alpha^2_{max}}{12\omega_{max}}t^3_{acc} - \frac {7\alpha^2{max}}{96\omega_{max}}t^3_{acc} \notag \\ & = \frac{-14\alpha^2_{max}}{96\omega_{max} }t^3 +\frac{\omega_{max}t_{acc}}{2} \tag{2-11} \end{align}iun cc=∫02tun cc4 omáx _amáximo _2t2dt __+∫2tun cctun cc( ohmáx _−4 omáx _amáximo _2( t2−2t_ _un cct+tun cc2)) d t=12 en puntomáx _amáximo _2t3
02tun cc+( ohmáx _t−4 omáx _amáximo _2(3t3−tun cct2+tun cc2t ))
2tun cctun cc=12 en puntomáx _amáximo _28tun cc3+Vayamáx _tun cc−4 omáx _amáximo _2(3tun cc3−tun cc3+tun cc3)−Vayamáx _2tun cc+4 omáx _amáximo _2(24tun cc3−4tun cc3+2tun cc3)=96 omáx _amáximo _2tun cc3+2Vayamáximo _2tun cc−12 en puntomáx _amáximo _2tun cc3−96 omáx _7 un2 maxtun cc3=96 omáx _− 14 unmáximo _2t3+2Vayamáx _tun cc( 2-11 )
El tiempo de la segunda curva (velocidad máxima) es
tmax = ( θ − 2 θ acc ) ω max (2-12) t_{max} = \frac{(\theta - 2\theta_{acc})}{\omega_ {max}}\etiqueta{2-12}tmáx _=Vayamáx _( yo−2 youn cc)( 2-12 )
2. Trayectoria de la ruta
La curva de trayectoria descrita por todos los puntos de posición a lo largo de una ruta es la curva de trayectoria de la ruta . Hay otros términos para la curva de trayectoria del camino, como la curva de trayectoria de posición y la curva de trayectoria de contorno, los cuales describen el camino para caminar, pero el camino y el contorno siguen siendo diferentes. El camino enfatiza la ruta de conducción, mientras que el contorno enfatiza la ubicación específica del sendero y su precisión. Entonces, ¿qué tipo de ocasión es adecuada para utilizar la curva de trayectoria del camino? Por lo general, este método se utiliza cuando los requisitos de movimiento no tienen requisitos de velocidad o aceleración, pero tienen requisitos estrictos de trayectoria o forma. La representación cinemática de la curva de trayectoria utiliza la función paramétrica "p(u)" . Cuando el rango de valor del parámetro u es 0~1, el rango de variación del valor de la función también es 0~1 . En cualquier caso, los parámetros de la función se eligen de manera que la velocidad sea cero cuando el movimiento comienza y se detiene, lo que reduce la ecuación polinómica final a la ecuación (2-11). Esta ecuación luego se puede utilizar en la ecuación (2-9) para permitir que el controlador genere una trayectoria de movimiento suave entre los puntos inicial y final.
θ ( t ) = θ inicio + ( θ fin − θ inicio ) p ( t − tstarttend − tstart ) (2-13) \theta(t) = \theta_{start} + (\theta_{end} - \theta_{ inicio})p(\frac{t - t_{start}}{t_{end} - t_{start}}) \tag{2-13}θ ( t )=icomienzo _ _ _ _+( yofinal _ _−icomienzo _ _ _ _) pag (tfinal _ _−tcomienzo _ _ _ _t−tcomienzo _ _ _ _)( 2-13 )
donde,θ inicio θ_{inicio}icomienzo _ _ _ _es la posición inicial del movimiento, θ end θ_{end}ifinal _ _es la posición final del movimiento, tstart t_{start}tcomienzo _ _ _ _es el tiempo de inicio del movimiento, tiende a t_ {end}tfinal _ _es la hora de finalización del ejercicio.
p ( u ) = A u 3 + B u 2 + C u + D (2-14) p(u) = Au^3 + Bu^2 + Cu + D \tag{2-14}p ( tu )=tu _3+B tu2+cu _+D(2-14)
式中,多项式的系数是
p ( 0 ) = 0 p ( 1 ) = 1 d d τ p ( 0 ) = 0 d d τ p ( 1 ) = 0 \begin{align} p(0) & = 0 \notag \\ p(1) & = 1 \notag \\ \frac{d}{d\tau}p(0) & = 0 \notag \\ \frac{d}{d\tau}p(1) & = 0 \notag \end{align} p(0)p(1)dτdp(0)dτdp(1)=0=1=0=0
然后,按照下列计算式计算求出,即
p ( 0 ) = 0 ⇒ 0 = A ⋅ 0 3 + B ⋅ 0 2 + C ⋅ 0 + D p ( 1 ) = 1 ⇒ 1 = A ⋅ 1 3 + B ⋅ 1 2 + C ⋅ 1 + D d d τ p ( 0 ) = 0 ⇒ 0 = 3 ⋅ A ⋅ 0 2 + 2 ⋅ B ⋅ 0 + C d d τ p ( 1 ) = 0 ⇒ 0 = 3 ⋅ A ⋅ 1 2 + 2 ⋅ B ⋅ 1 + C B = ( − 3 2 ) A A = − 2 , B = 3 , C = 0 , D = 0 p ( u ) = − 2 u 3 + 3 u 2 \begin{align} p(0) & = 0 \Rightarrow \quad 0 = A·0^3 + B·0^2 + C·0 + D \notag \\ p(1) & = 1 \Rightarrow \quad 1 = A·1^3 + B·1^2 + C·1 + D \notag \\ \frac{d}{d\tau}p(0) & = 0 \Rightarrow \quad 0 = 3·A·0^2 + 2·B·0 + C \notag \\ \frac{d}{d\tau}p(1) & = 0 \Rightarrow \quad 0 = 3·A·1^2 + 2·B·1 + C \notag \\ B &= (-\frac{3}{2})A \notag \\ A = -2, B & = 3, C = 0, D = 0 \notag \\ p(u) & = -2u^3 + 3u^2 \tag{2-15} \end{align} p(0)p(1)re τrepag ( 0 )re τrepag ( 1 )BA=− 2 ,Bp ( u )=0⇒0=Un ⋅03+segundo ⋅02+C ⋅0+D=1⇒1=Un ⋅13+segundo ⋅12+C ⋅1+D=0⇒0=3⋅ _Un ⋅02+2⋅ _segundo ⋅0+C=0⇒0=3⋅ _Un ⋅12+2⋅ _segundo ⋅1+C=( -23) Un=3 ,C=0 ,D=0=− 2 y3+3 tu2( 2-15 )
3. Trayectoria de movimiento multieje
Además del movimiento de un solo eje, la trayectoria de movimiento de muchas máquinas es el producto compuesto del movimiento multieje. Por ejemplo, si un robot completa un movimiento plano y alcanza otra nueva posición desde un punto de posición, debe completar un movimiento compuesto entre los dos puntos.
En el ámbito del mecanizado, el movimiento del cabezal del dispositivo de trabajo suele ser un movimiento multieje. Para el movimiento compuesto plano bidimensional, existen impresoras, trazadores ampliamente utilizados en oficinas, tornos, taladros de hilera, etc. en el campo del procesamiento mecánico; para el movimiento puntual tridimensional espacial, existen taladrado CNC, taladrado por coordenadas CNC y Fresadoras CNC, centros de mecanizado y sistemas de fabricación flexibles, máquinas de manipulación automática y grúas en grandes centros logísticos.
4. Trayectoria del movimiento alternativo
Además del movimiento punto a punto, existe una amplia gama de aplicaciones del movimiento alternativo. El perfil de movimiento alternativo es periódico y se caracteriza por la indexación del movimiento mediante un temporizador o codificador maestro. La leva electrónica también pertenece a la categoría de indexación deportiva, tiene también la función de transmisión y su función de cambio de velocidad se realiza mediante engranajes electrónicos.
Hay dos formas de configurar la leva electrónica (también conocida como eje electrónico): ① ingresar los parámetros característicos, ② usar el formulario descargable (este método se completa básicamente a través del puerto serie o el bus de datos). Los datos de la tabla se utilizan para proporcionar datos básicos para el codificador maestro o el reloj maestro. Cada elemento de los datos de la tabla corresponde a una posición del codificador, y cada posición del codificador determina un punto objetivo en movimiento correspondiente. Se pueden compilar todo tipo de trayectorias de movimiento en tablas de datos con anticipación y los usuarios pueden descargar una curva trapezoidal o una curva en forma de S según las necesidades reales. Más comúnmente, también es posible personalizar un perfil que simule la funcionalidad de una leva mecánica especializada.
Hay muchas formas de especificar la relación entre el reloj maestro y el eje de control. El método más común es utilizar la conversión numérica del recuento del codificador al ángulo correspondiente a la rotación del codificador principal. Por ejemplo, usar el encoder principal para girar 360° corresponde al cambio del valor de conteo del encoder y permite definir uno o más puntos de salida en cada posición de la tabla. Al ejecutar la tabla, después de leer los datos de la última posición de la mesa, el control de movimiento El controlador sobrescribirá los datos de la tabla y se reiniciará desde el punto inicial, por lo que el objetivo de las posiciones inicial y final debe ser el mismo, para evitar el movimiento de salto.
2.2.3 Interpolador
1. Definición de interpolador
Un interpolador es un algoritmo en un controlador de movimiento. La llamada "interpolación" consiste en densificar puntos de datos en una curva con un punto inicial y un punto final conocidos . Por lo general, las formas que se pueden adoptar son la interpolación simple de una sola vez, la interpolación de dos tiempos o la interpolación de función spline cúbica más compleja . El resultado de la interpolación se introducirá en el bucle de control.
De la definición de interpolación se puede ver que en el sistema de control de contorno, la interpolación es la función más importante y la característica esencial del sistema de control de contorno. La estabilidad y precisión del algoritmo de interpolación afectará directamente el índice de rendimiento del sistema CNC, por lo que para permitir que el sistema CNC avanzado realice sus funciones, sin importar en el extranjero o en casa, el algoritmo de interpolación con alta precisión y rapidez. La velocidad siempre ha sido la esperanza de los investigadores. La dificultad que se puede superar es también la tecnología central que cada empresa de CNC mantiene en secreto. Por ejemplo, muchas funciones de los sistemas CNC de Siemens y Fanuc están abiertas a los usuarios, pero sus algoritmos de interpolación nunca están abiertos a los usuarios.
2. Tipos de imputación Hay
muchos tipos de imputación. Según si el trabajo de interpolación se completa mediante un circuito de hardware o un programa de software, se puede dividir en interpolación de hardware e interpolación de software. La Figura 2-11 muestra la interpolación lineal, la interpolación circular y la combinación de ambas.
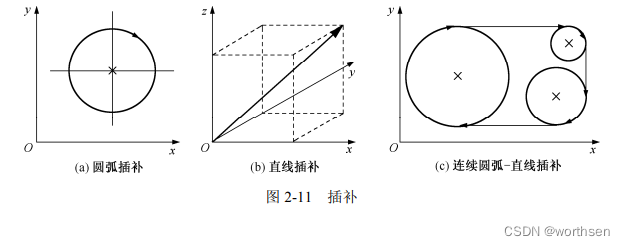
Según el modelo matemático, se puede dividir en primario (interpolación lineal), secundario (interpolación circular, interpolación parabólica, elipse, hipérbola, spline cuadrático) y de alto orden (interpolación spline).
En la actualidad, la interpolación más utilizada se divide en dos categorías: interpolación de pulso de referencia e interpolación de muestreo de datos. El siguiente es un análisis detallado de la interpolación.
- Interpolación lineal
(1) Principio de la interpolación lineal
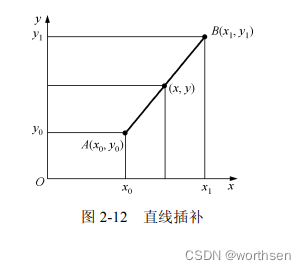
Si se conocen los puntos de coordenadas 0 0 (, ) xy y 1 1 (, ) xy, entonces la interpolación lineal es una línea recta entre estos dos puntos. Para x∈ 0 1 (,) xx , el valor de y conforme a la regla de la línea recta se puede obtener mediante la siguiente fórmula:
y − y 0 x − x 0 = y 1 − y 0 x 1 − x 0 (2- 16) \frac{ y - y_0}{x - x_0} = \frac{y_1 - y_0}{x_1 - x_0} \tag{2-16}X−X0y−y0=X1−X0y1−y0( 2-16 )
Como se muestra en la Figura 2-12, 0 0 A(, ) xy y 1 1 Bx y (, ) son puntos conocidos, y el punto (, ) xy en la línea recta AB es la interpolación lineal entre los dos puntos, la interpolación lineal se basa en x, y se puede obtener y, es decir,
y = y 0 + ( x − x 0 ) y 1 − y 0 x 1 − x 0 = y 0 + ( x − x 0 ) y 1 − ( x − x 0 ) y 0 x 1 − x 0 (2-17) y = y_0 + (x-x_0)\frac{y_1 - y_0}{x_1 - x_0} \tag{2-17} = y_0 + \frac{( x - x_0)y_1 - (x - x_0)y_0}{x_1 - x_0}y=y0+( x−X0)X1−X0y1−y0=y0+X1−X0( x−X0) y1−( x−X0) y0( 2-17 )
La ecuación (2-17) también puede considerarse como un promedio ponderado, y el valor ponderado es inversamente proporcional a la distancia entre el punto final y el punto desconocido. Cuanto más cercana sea la distancia, mayor será el impacto. El peso esx − x 0 x 1 − x 0 \frac{x-x_0}{x_1 - x_0}X1−x _0x - x0和x 1 − xx 1 − x 0 \frac{x_1 - x}{x_1 - x_0}X1−x _0X1−x _.
Fuera de este intervalo, el cálculo utiliza la misma forma de inducción lineal que en la ecuación (2-17).
La interpolación lineal se aplica a menudo en gráficos por computadora. La interpolación lineal entre dos valores es una operación básica. La palabra " lerp " se usa comúnmente como término en el campo de los gráficos por computadora. El significado exacto de "lerp" es interpolación lineal .
(2) Pasos de la interpolación lineal
La interpolación lineal generalmente tiene tres pasos: ① construcción de la función de desviación, ② cálculo recursivo de la función de desviación, ③ discriminación del punto final.
2) Interpolación circular
(1) Principio de interpolación circular
El algoritmo de interpolación circular está dirigido al movimiento de múltiples ejes y su idea es utilizar avance de cuerda en lugar de avance de arco. Hay dos tipos de interpolación circular: interpolación circular en sentido horario
e interpolación circular en sentido antihorario. Para el procesamiento mecánico, al procesar un arco circular, la distancia desde el punto de procesamiento hasta el centro del círculo se puede
comparar con el radio del círculo para reflejar la desviación durante el procesamiento. Tomando como ejemplo el arco circular inverso en el primer cuadrante, se puede deducir la fórmula de cálculo de la desviación de la interpolación circular.
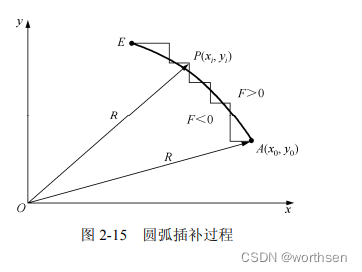
Para procesar el arco AE se muestra en la Figura 2-15. El arco AE se ubica en el primer cuadrante, corre en sentido antihorario, con un radio R, con el origen como centro y las
coordenadas del punto inicial son A ( x 0 , y 0 ) A(x_0, y_0)un ( x0,y0) , establezca las coordenadas de cualquier punto de mecanizado en el arco comoP ( xi , yi ) P(x_i, y_i)P ( xyo,yyo) . El cuadrado de la distancia entre el punto P y el centro del círculo esR p 2 = xi 2 + yi 2 R^2_p = x_i^2 + y_i^2Rpag2=Xi2+yi2。
Usando las reglas anteriores y la fórmula de desviación, se puede procesar el arco circular aproximado de la línea discontinua que se muestra en la Figura 2-15.
(2) Pasos de interpolación circular
Los pasos específicos de la interpolación circular son exactamente los mismos que los de la interpolación lineal, y también hay tres pasos: ①La construcción de la función de desviación, ②Cálculo recursivo de la función de desviación, ③Discriminación del punto final.
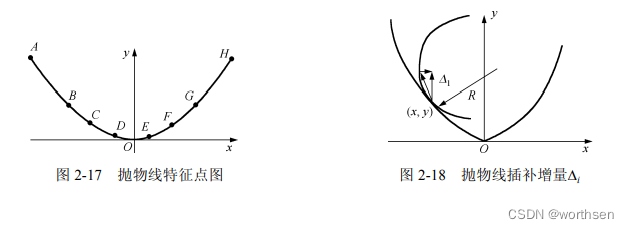
3) Interpolación parabólica
El algoritmo de interpolación parabólica es un nuevo tipo de algoritmo de interpolación. La función parabólica es una función simple que se puede realizar tanto mediante hardware como mediante software.
El algoritmo de interpolación parabólica toma el valor de coordenadas del vértice de la parábola como origen, y el punto inicial y el punto final de la parábola se convierten en coordenadas relativas con el vértice de la parábola como origen. La dirección de apertura de una parábola es diferente y su expresión matemática también es diferente. En aras de la brevedad, se toma un caso como ejemplo para ilustrar el método y el proceso de cálculo de la interpolación parabólica. Sea la ecuación parabólica
x 2 = 2 py (2-29) x^2 = 2py \tag{2-29}X2=2 p y( 2-29 )
Para cumplir con los requisitos de alta velocidad y alta precisión en el campo de la creación rápida de prototipos y el procesamiento de moldes, la interpolación spline aprovecha el buen control local de las curvas B-spline y las ventajas de la rápida velocidad de procesamiento de la CPU de la computadora, y desarrolla un Método basado en curvas B-spline cúbicas no uniformes.Algoritmo
(1) Principio de interpolación spline
Después de que el sistema de fabricación de prototipos rápidos lee el archivo STL, primero utiliza el algoritmo de ajuste para ajustar estos puntos de datos discretos en B-splines cúbicos segmentados, no uniformes e irracionales; luego construye una lista vinculada para guardar coeficientes y longitudes de cada segmento B-spline; lea esta lista vinculada durante la interpolación y use el punto de interpolación actual como objetivo de control para encontrar el valor de coordenadas del siguiente punto de interpolación de acuerdo con el indicador del segmento, y complete la interpolación autoadaptativa con velocidad variable.
(2) Pasos de interpolación spline
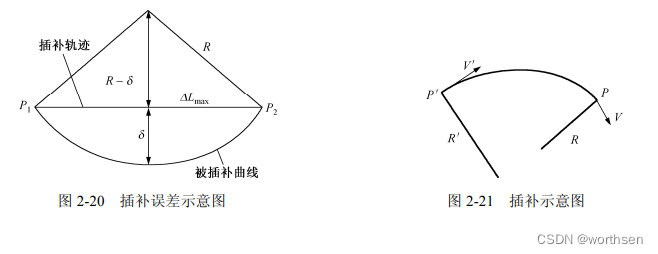
El algoritmo de interpolación spline utiliza el principio de muestreo de datos paramétricos para realizar el proceso de interpolación. La idea básica es dividir el eje de tiempo en pequeños intervalos con intervalos no uniformes según el período de muestreo dado. De acuerdo con el dados los requisitos de velocidad, aceleración y desaceleración y el error permitido, pequeños segmentos de recta espacial Δ L 1 , Δ L 2 , Δ L 3 , . . . , Δ L m " ΔL_1 , ΔL_2 , ΔL_3 ,... , ΔL_m "PERDIDO _1L _ _2L _ _3... _ _ _ _m" ,... para aproximarnos a la curva interpolada, y obtener gradualmente los puntos finalesp 1 , p 2 , p 3 , . . . , pm , . . . p_1, p_2, p_3, .. .,p_m,...pag1、pag2、pag3、... 、pm, ... valores de coordenadas, es decir, tomar la velocidad del punto de interpolación actual como objetivo de control y tomar el período de interpolaciónτ \tauLa longitud del paso de interpolación en τ es igual a la longitud del arco en la curva como base y, finalmente, encuentre las coordenadas del siguiente punto de interpolación.
(3) Cálculo de interpolación spline
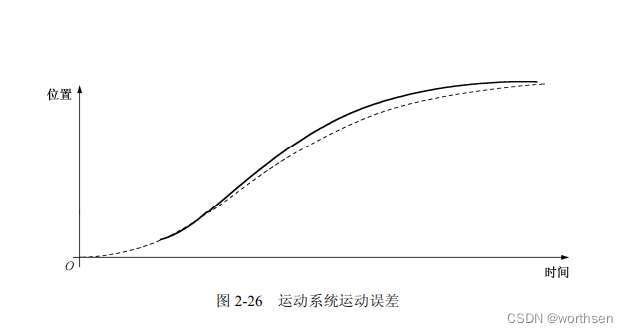
La Figura 2-26 muestra la relación entre la posición teóricamente esperada y el error de posición real obtenido, donde la línea continua es la posición esperada y la línea de puntos es la posición realmente obtenida.
2.2.4 Lazo de control
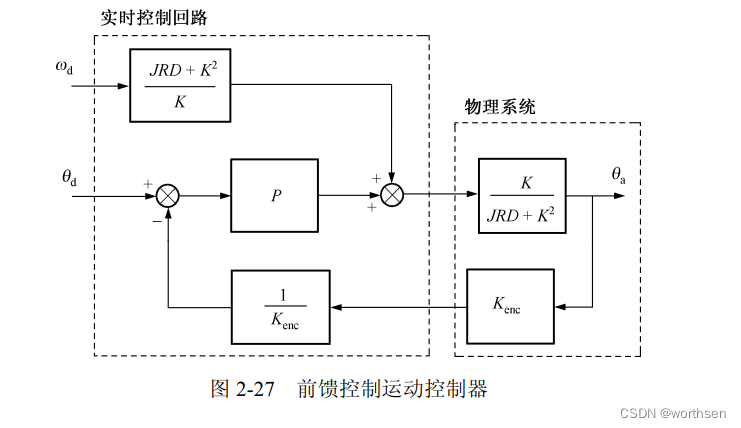
Se solidifica un algoritmo de control en el controlador de movimiento y el algoritmo calcula en función de la señal de diferencia entre la posición o velocidad esperada y la posición o velocidad real. Los controladores de movimiento suelen utilizar algoritmos PID (proporcional, integral, derivativo) mejorados para hacer que el control sea más potente. La configuración de ganancia del PID determina la capacidad de control del bucle de control. La arquitectura básica del bucle de control del sistema de control de movimiento real se estudia en combinación con el control anticipado, como se muestra en la Figura 2-27. El diagrama incluye dos componentes: uno es el circuito de control en tiempo real y el otro es el sistema físico. El sistema físico mencionado aquí es el actuador, específicamente el motor en este sistema. θ d θ_d en la Figura 2-27irees la configuración de entrada de posición; θ a θ_aiunes la salida real de la posición, y la función del bucle de control en tiempo real es proporcionar instrucciones de control para el sistema físico; ω d ω_dVayarees el punto de ajuste de entrada de control anticipativo, a través de ω d ω_dVayareLos algoritmos se pueden corregir cambiando el algoritmo.
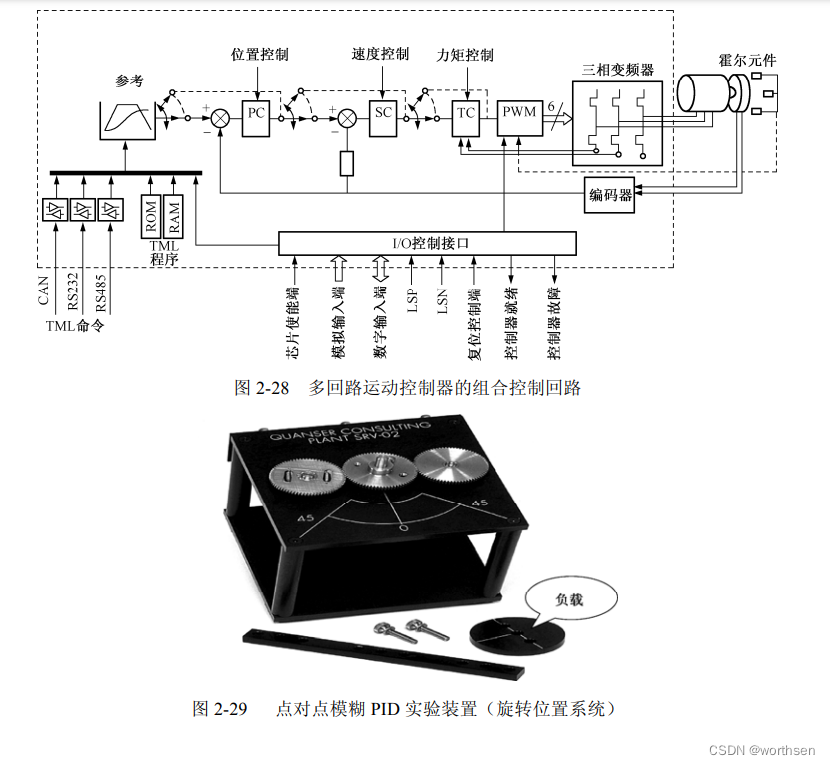
La Figura 2-28 muestra el bucle de control combinado del controlador de movimiento de bucle múltiple. El sistema tiene una combinación flexible y puede realizar control de bucle único (posición, velocidad, par), control de bucle doble y control de tres bucles. Su programa de control básico es también el algoritmo de control (posición, velocidad, par) de los tres reguladores, que se ha solidificado en la memoria de solo lectura. La comunicación entre el usuario y el controlador de movimiento se puede realizar a través de CAN, RS232, RS485. También hay ocho interfaces de control de E/S en el sistema, incluidas seis entradas y dos salidas, como se muestra en la Figura 2-28.
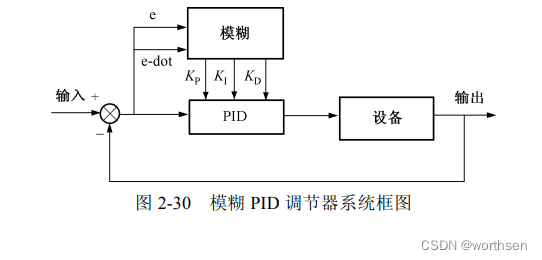
Con el desarrollo de la tecnología de control inteligente, el nuevo circuito de control del sistema de control de movimiento comenzó a utilizar un algoritmo PID difuso. Aquí hay un ejemplo.
La Figura 2-29 muestra un dispositivo experimental, la tarea es lograr un movimiento punto a punto. Consiste en un conjunto de controlador de servomotor, servomotor, codificador y PC. El controlador es una PC y el software de control que se ejecuta en la PC es un programa de experimento que utiliza MATLAB.
1. Modelo matemático
Despreciando la no linealidad del sistema, de acuerdo con las leyes relevantes de Newton, el modelo matemático dinámico de este dispositivo experimental con sistema de posición giratoria es
θ 1 ( s ) V m ( s ) = 64,12 s ( s + 36,43 ) (2-45) \ frac{\theta_1(s)}{V_m(s)} = \frac{64.12}{s(s+36.43)} \tag{2-45}Vm( s )i1( s )=s ( s+36,43 )64.12( 2-45 )
La Figura 2-30 muestra un diagrama de bloques del sistema de un regulador PID difuso, su algoritmo básico es el algoritmo PID, pero los parámetros P, I, D (KP, KI, KD) (K_P, K_I, K_D)(KP、kyo、kre) se determina en función del error entre la entrada y la salida y la tasa de cambio del error.
2. Diseño de valor nominal PID
El algoritmo de control del regulador PID que se muestra en la Figura 2-30 se puede expresar mediante la fórmula (2-33). KP, KI, KD K_P, K_I, K_DkP、kyo、kreson la ganancia proporcional, integral y derivada de la ganancia del regulador, respectivamente.
e ( t ) = K pe ( t ) + K i ∫ 0 te ( t ) dt + K dde ( t ) dt (2-46) e(t) = K_pe(t) + K_i\int_{0}^{ t}e(t)dt + K_d\frac{de(t)}{dt} \tag{2-46}mi ( t )=kpmi ( t )+kyo∫0tmi ( t ) dt _+kred tde(t)( 2-46 )
2.3 Hardware del controlador de movimiento
-
Microcontroladores de 8, 16 y 32 bits basados en tecnología de microprocesador (MCU)
.

-
Tecnología basada en ASIC
El uso de un circuito integrado de aplicación específica (ASIC) de chip dedicado puede realizar algunos algoritmos de control específicos, como el algoritmo PID, el procesamiento de señales del codificador y otras funciones. Los usuarios pueden controlarlo enviando instrucciones especiales. Las ventajas de este tipo de tecnología son relativamente fácil de usar, gran capacidad de seguimiento de las instrucciones de entrada/salida del sistema, respuesta rápida y alta confiabilidad. El PCL6045B de NPM, el MCX314 de NOVA, etc. son chips de control de movimiento dedicados. La desventaja de este tipo de controlador es que no es fácil de actualizar, el algoritmo de control no es fácil de cambiar y actualizar y el costo del hardware es alto. -
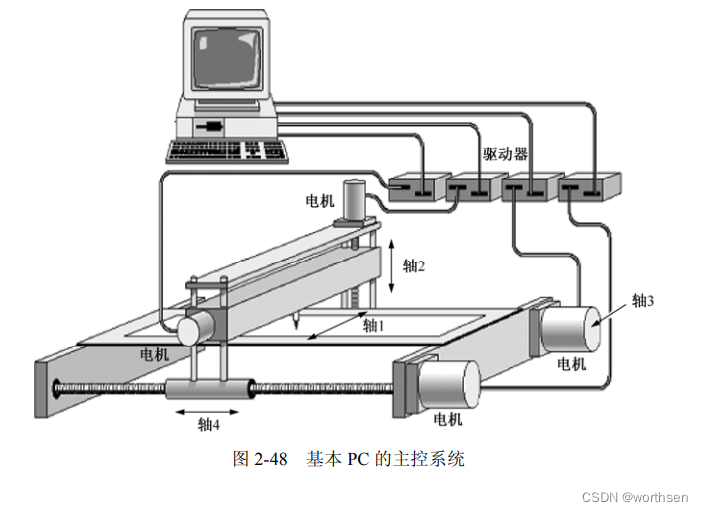
Tecnología basada en PC
Debido al rápido desarrollo de las PC, la tecnología madura y los abundantes recursos de software, aprovechar al máximo los recursos de la PC e integrar sus funciones en los controladores de movimiento se ha convertido en el foco de la investigación y el desarrollo en países de todo el mundo. Específicamente, PC NC se basa en la plataforma de hardware y el sistema operativo de la PC, utiliza placas de hardware y software públicas y construye un sistema de control de movimiento de acuerdo con los requisitos del controlador de movimiento. Debido a que el bus de PC es un bus abierto, la arquitectura de hardware del sistema de PC tiene las características de apertura, modularización e integrabilidad , lo que proporciona una garantía para que la mayoría de los usuarios agreguen funciones al sistema CNC y realicen funciones individualizadas a través del desarrollo. del software de aplicación. La desventaja del controlador de movimiento de PC es que tiene un rendimiento en tiempo real deficiente en comparación con el sistema de control de movimiento dedicado y su confiabilidad no es tan alta como la del sistema de control de movimiento dedicado y requiere un mayor nivel de programadores reales , especialmente El uso de PC para el desarrollo de algoritmos de control de movimiento de alto rendimiento, la experiencia se vuelve muy importante y el costo de la plataforma de verificación en sí no es bajo, por lo que el sistema de control de movimiento basado en PC es más adecuado para múltiples aplicaciones de gama media y alta. -objetos del sistema de movimiento de propósito.
-
Tecnología basada en DSP
Desde la década de 1990, con la rápida mejora de la tecnología microelectrónica, los chips de procesamiento de señales digitales (DSP) se han utilizado cada vez más en sistemas de control de movimiento debido a sus capacidades informáticas de alta velocidad. Los chips DSP pueden garantizar eficazmente el rendimiento en tiempo real de algoritmos complejos, por lo que el DSP se puede aplicar en controladores de movimiento. En la actualidad, todos los controladores de movimiento convencionales adoptan la tecnología DSP. Por ejemplo, la tarjeta de control de movimiento PMAC de American Delta Company adopta DSP56001 de Motorola Company; la tarjeta de control de movimiento GT-400 de Domestic Solid Technology Co., Ltd. adopta ADSP2181 de ADI Company. -
Basado en la tecnología del controlador lógico programable,
el algoritmo y el circuito del controlador de movimiento se pueden realizar en el controlador lógico programable, lo que puede mejorar la integración y el rendimiento del sistema y tiene una gran flexibilidad. Pero todo el sistema necesita una gran cantidad de unidades lógicas, la programación es difícil y costosa. Por lo tanto, este método sólo se puede implementar en algunas ocasiones con funciones relativamente simples y requisitos de alta velocidad. -
Tecnología basada en procesadores multinúcleo
Estos controladores integran múltiples núcleos de procesador dentro de un solo chip. Por ejemplo, la plataforma Da Vinci de TI integra un núcleo DSP C64X y un núcleo ARM9, donde DSP se usa para computación y ARM para control. La tecnología de procesadores multinúcleo es una dirección para el desarrollo futuro de procesadores.
La forma de transmisión de datos del controlador de movimiento se puede dividir en tipo de bus y tipo de red. Los tipos de bus del controlador de movimiento incluyen ISA, PCI, VME, USB, SPI, bus STD y bus CAN; los tipos de red incluyen Motionnet, Ethernet, Internet, etc.
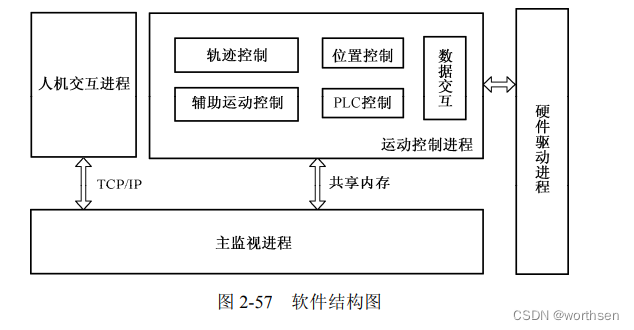
2.4 Software del controlador de movimiento
En términos generales, el sistema de control de movimiento es un sistema de control complejo, que tiene los requisitos de control en tiempo real, diversidad funcional, jerarquía de rendimiento y personalidad de interfaz. Cómo construir módulos funcionales, realizar la combinación orgánica de módulos funcionales y lograr la unidad orgánica de tiempo real y no real es la tecnología decisiva para realizar productos de controlador de movimiento específicos mediante el uso del llamado mecanismo de motor. Su esencia es utilizar un método específico para completar el ensamblaje secundario del software y realizar un intercambio de información confiable y eficiente. Las tecnologías de soporte que el software puede adoptar incluyen tecnología de personalización de parámetros, tecnología de ensamblaje de software, tecnología de comunicación de procesos y tecnología de script. El sistema de software del controlador de movimiento se puede dividir simplemente en tres partes: interfaz, control de movimiento y servoaccionamiento .
3 Tecnología de actuador
Los actuadores son componentes esenciales en los sistemas de control de movimiento y son la clave para realizar tareas de movimiento en sistemas reales. Con el rápido desarrollo de la tecnología moderna, la tecnología de actuadores también ha logrado grandes avances.
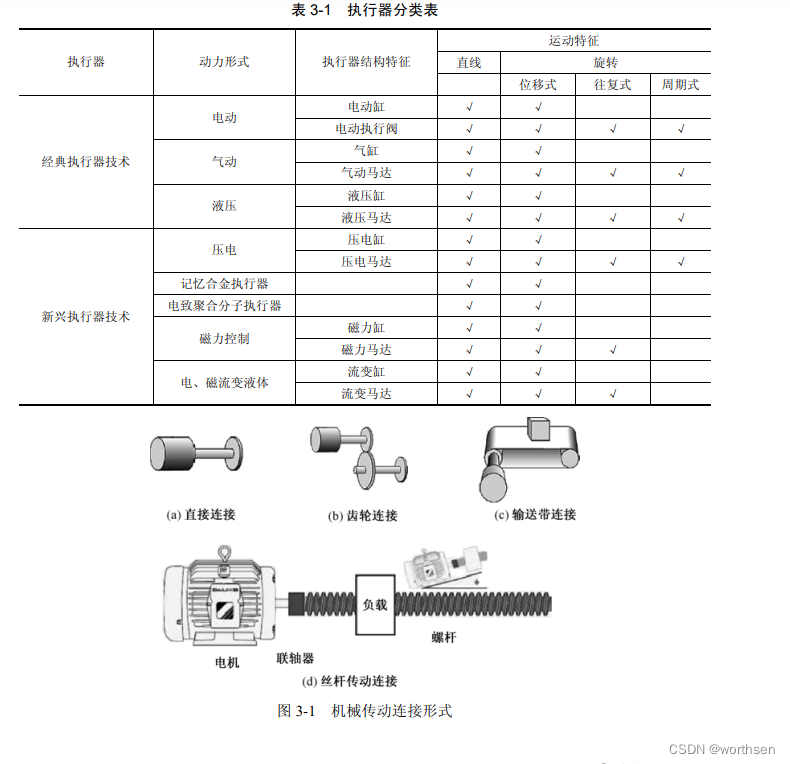
1. Clasificación de actuadores
Hay muchos tipos y tamaños de actuadores, pero se pueden distinguir según su fuente de alimentación y otras características.
(1) Según la fuente de energía, los actuadores se pueden dividir en actuadores eléctricos, actuadores hidráulicos, actuadores neumáticos y nuevos actuadores microelectromecánicos.
(2) Según las características estructurales de las piezas móviles, los actuadores se pueden dividir en actuadores de cilindro, actuadores de motor, etc.
(3) Según las características de la pista de movimiento, los actuadores se pueden dividir en actuadores lineales y actuadores giratorios, y los actuadores giratorios se pueden dividir en desplazamiento, periódicos y alternativos.
(4) Para los actuadores nuevos, existen actuadores piezoeléctricos, actuadores de aleación con memoria, actuadores moleculares de electropolimerización, actuadores de control de fuerza magnética, actuadores de fluidos eléctricos y magnetorreológicos, etc.
2. Diseño del actuador
El diseño del actuador se basa en el análisis de la función de movimiento del sistema. Para completar el diseño del actuador, primero es necesario aclarar las tareas mecánicas que debe realizar el sistema de control de movimiento y establecer un análisis mecánico del sistema, que incluya principalmente análisis cinemático y análisis mecánico.
Mediante el análisis de la conexión mecánica básica se puede calcular el momento de inercia del mecanismo de transmisión mecánica. Este tipo de sistema se puede dividir en cuatro formas de conexión básicas: conexión directa, conexión de engranajes, conexión de cinta transportadora y conexión de tornillo, como se muestra en la Figura 3-1.
4 Tecnología de control de motores de CC
4.1 Descripción general de la regulación de velocidad del motor de CC
4.1.1 Historia del desarrollo de la regulación de velocidad del motor de CC
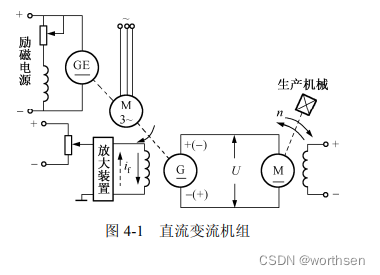
1. La era de las unidades convertidoras
La Figura 4-1 muestra el esquema de regulación de velocidad de los primeros motores de CC, llamados unidades convertidoras de CC. El sistema se compone principalmente de cinco componentes principales: motor primario, generador de CC, motor de CC, fuente de alimentación de excitación y maquinaria de producción. Su principio de funcionamiento básico es: un motor de CA trifásico acciona un generador de CC, y el generador de CC genera energía de CC como fuente de alimentación para el motor de CC, y luego el motor de CC impulsa la maquinaria de producción. Mediante el control del circuito de excitación y el dispositivo amplificador, se puede cambiar el voltaje de salida del generador de CC para lograr el propósito de controlar la velocidad del motor de CC.
2.相控整流时代
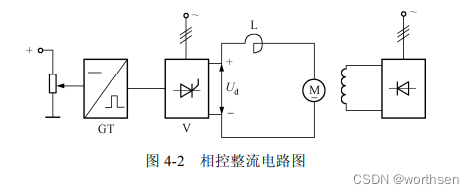
20 世纪 50 年代末期,随着电力电子技术的早期代表——晶闸管(SCR)的出现,直流电机调压调速技术进入到一个新的时期。图 4-2 所示的是相控整流电路图。相控整流由 5 大部件组成:相控整流器、电抗器、直流电机、直流励磁控制电路和相控整流器触发电路。其工作原理是:相控整流触发电路根据设定对相控整流器进行控制,输出电压可调的直流电,经电抗器后供给直流电机。当需要改变直流电机转速时,只要改变触发电路的触发角,就可实现调速的目的。但是由于晶闸管属于半控型器件,其最大问题就是会对电网造成纹波干扰。因此,这项技术在 20 世纪 80 年代后期就逐渐被淘汰了。
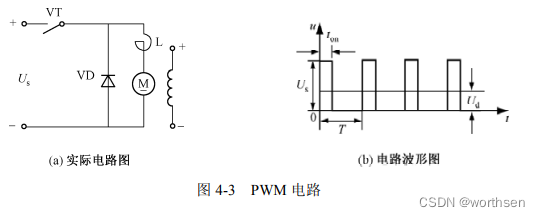
3.PWM 变频技术时代
随着电力电子技术的快速发展,自关断器件(MOSFET、IBGB、GTR、GTO)的开关频率大大提高。与相控整流器相比,PWM 变换器直流调速系统具有较高的动态性能和较宽的调速范围,其综合性能明显优于相控方式,主要优点有:
(1) 主电路结构简单,所需功率器件少;
(2) 电枢电流连续性好,谐波少,电机的损耗和发热小;
(3) 低速性能得到改善,稳速精度提高,因而调速范围增大;
(4) 系统的频带宽,快速性能好,动态抗干扰能力增强;
(5) 主电路元件工作在开关状态,导通损耗小;
(6) 直流电源采用三相可控整流,电网的功率因数提高。
由于 PWM 调压调速的优点较其他直流调速方法更加合理,因此目前 PWM 直流调速已经成为核心技术。
图 4-3 所示的就是一个典型的 PWM 电路。
4.1.2 直流电机的调速方法
1.改变电枢回路电阻调速法
2.减弱磁通调速法
3.调节电枢电压调速法
4.1.4 直流 H 型可逆 PWM 变换器-电机系统的能量回馈
如图 4-14 所示,直流 H 型可逆 PWM 变换器-电机系统由一个三相整流桥组件、一个蓄能平波电容器、一套 H 型可逆 PWM 变换电路组件和一台直流电机组成。直流电机采用他励式供电方式,其电路功能如下。
(1) 由 6 个二极管组成的整流器把电网提供的交流电整流成直流电。
(2) 直流电源采用大电容滤波。
(3) PWM 组件对电机电枢电压进行控制。
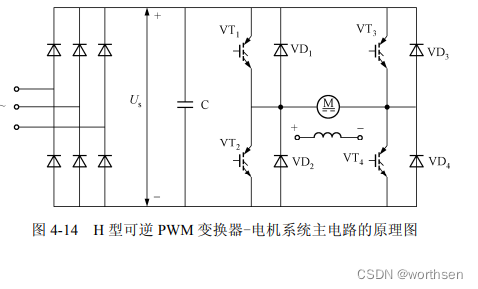
图 4-14 所示的电路存在如下问题。
1.电能回馈问题
(1) 当电机工作在回馈制动状态时,将动能转变为电能并回馈到直流侧。
(2) 由于二极管整流器的能量单向传递性,电能不可能通过整流装置送回交流电网,只能向滤波电容器充电。
(3) 由此产生了电能回馈问题。
2.泵升电压
(1) 对滤波电容器充电的结果会造成直流侧电压升高,称为“泵升电压”。
(2) 系统在制动时释放的动能将表现为电容器储能的增高,所以要适当地选择电容器的电容量或采取其他措施,以保护电力电子功率开关器件不被泵升电压击穿。储能的增量约等于电机系统在制动时释放的全部动能。
4.1.5 直流 PWM 调速系统的数学模型及机械特性
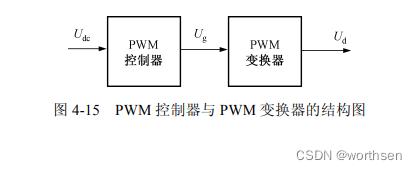
1.PWM 控制与 PWM 变换器的结构图
图 4-15 所示的是 PWM 控制器与 PWM 变换器的结构图,输入是 U d c U_{dc} Udc, el control es U g U_gUd.gramo, la salida es U d U_dUd.re。
4.2 Sistema de control de velocidad de circuito cerrado y controlador de control de velocidad
4.2.1 Sistema de control de velocidad de circuito cerrado
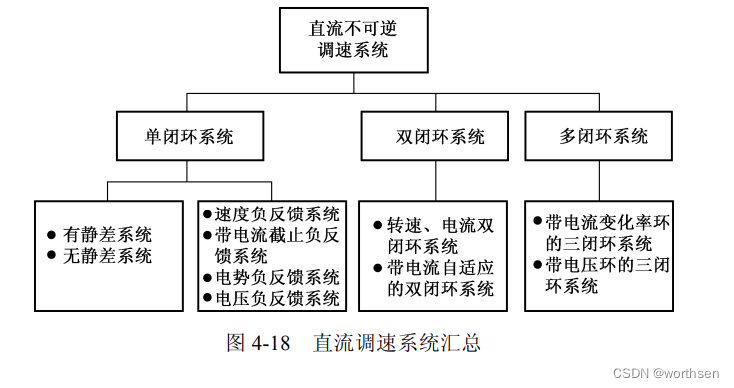
Según el número y la función de los reguladores, el sistema de regulación de velocidad de circuito cerrado se puede dividir en un sistema de regulación de velocidad de circuito cerrado único, un sistema de regulación de velocidad de circuito cerrado doble y un sistema de regulación de velocidad de circuito cerrado múltiple.
- Sistema de control de velocidad de circuito cerrado único El
sistema de control de velocidad de circuito cerrado único incluye velocidad, posición, voltaje, corriente, tasa de cambio de voltaje y tasa de cambio de corriente . En este libro, a menos que se especifique lo contrario, el sistema de control de velocidad de circuito cerrado único generalmente se refiere al sistema regulador de velocidad. - Sistema de control de velocidad de circuito cerrado doble El
sistema de control de velocidad de circuito cerrado doble generalmente incluye:
①sistema de control de velocidad de circuito cerrado doble de posición y corriente; ②sistema de
control de velocidad de circuito cerrado doble de circuito cerrado de velocidad y corriente;
③velocidad de circuito cerrado doble de circuito cerrado de tensión y corriente sistema de control;
④voltaje, bucle de corriente Cambio de bucle de velocidad sistema de regulación de velocidad de bucle cerrado doble.
Por lo general, a menos que se especifique lo contrario, el sistema de control de velocidad de bucle cerrado doble se refiere al sistema de control de velocidad de bucle cerrado doble de velocidad y corriente. - Sistema de control de velocidad de tres bucles cerrados Los
sistemas de control de velocidad de bucle cerrado más comunes incluyen:
①Tres sistemas de control de velocidad de bucle cerrado con bucles de posición, voltaje y corriente;
②Tres sistemas de control de velocidad de bucle cerrado con bucles de velocidad, voltaje y corriente;
③Tres Sistemas de control de velocidad de circuito cerrado con bucles de velocidad, corriente y tasa de cambio de corriente. Sistema de control de velocidad de circuito cerrado.
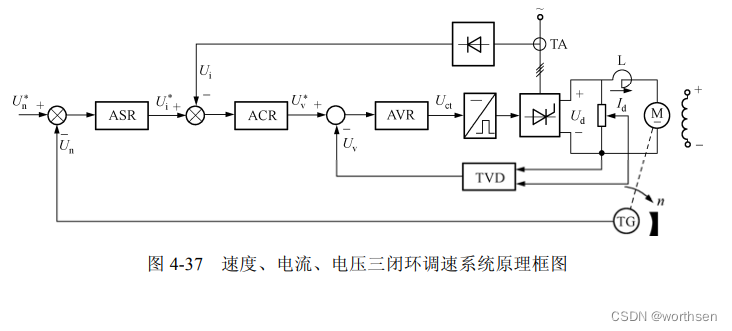
A menos que se especifique lo contrario, el sistema de control de velocidad de tres circuitos cerrados se refiere al sistema de control de velocidad de tres circuitos cerrados de velocidad, voltaje y corriente.
En la Figura 4-18, se resume el sistema de control de velocidad de CC.
1. Sistema de control de velocidad de circuito cerrado único
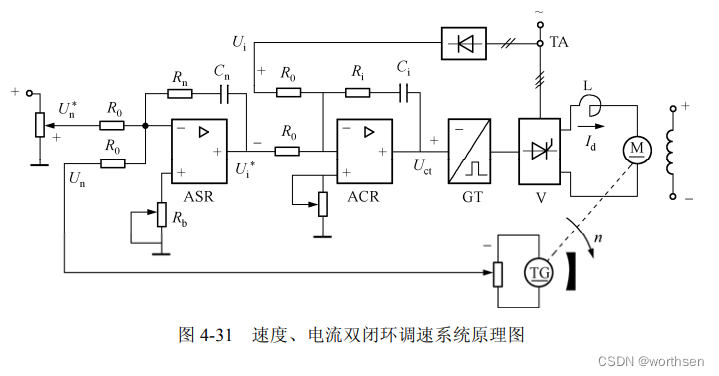
2. Sistema de regulación de velocidad de doble circuito cerrado de velocidad y corriente
El sistema de regulación de velocidad de doble circuito cerrado de velocidad y corriente tiene las siguientes características: ①La variable ajustada del sistema es la velocidad, el error detectado es la velocidad y la influencia También se debe eliminar cualquier perturbación en la velocidad; ②La velocidad es de circuito cerrado único. El sistema de control de velocidad no puede controlar el proceso dinámico de la corriente (o par).
3. Sistema de control de velocidad de circuito cerrado de tres velocidades, corriente y voltaje
El sistema de control de velocidad de circuito cerrado de tres velocidades, corriente y voltaje tiene como objetivo lograr un mayor rendimiento de control de velocidad e introduce la tasa de cambio de corriente o el bucle de voltaje sobre la base del bucle de velocidad y el bucle actual.
5 tecnología de control de motores de CA
Los motores de CA tienen las características de estructura simple, uso y mantenimiento convenientes, y se usan ampliamente en ventiladores, bombas de agua, compresores, transportadores y otros campos.
5.1 Teoría básica del sistema de control de velocidad del motor de CA
Los motores de CA se dividen principalmente en dos categorías: motores de CA asíncronos y motores de CA síncronos. Los motores de CA asíncronos son del tipo jaula de ardilla y del tipo bobinado; los motores de CA síncronos son del tipo autocontrolado, del tipo controlado por otros y del tipo de imán permanente.
5.1.1 La necesidad de estudiar el problema de desacoplamiento de los motores de CA
En comparación con los motores de CC, los motores de CA tienen una estructura más simple y son más cómodos de usar y mantener. Entonces, ¿por qué el control de velocidad de los primeros motores de CA no se hizo tan popular como debería? Hay cuatro razones principales:
la primera es el modelo matemático, porque las características del motor de CA son de fuerte acoplamiento, variables en el tiempo y no lineales, por lo que la descripción del modelo matemático es complicada, lo que dificulta el control del par del motor; el segundo
es la tecnología del controlador, que requiere En comparación con el motor de CC, el objeto de cálculo es más complejo, lo que requiere que el controlador del motor de CA sea potente; el tercero es la tecnología de la electrónica de potencia
y las funciones de la potencia inicial. Los dispositivos electrónicos son difíciles de cumplir con los requisitos del motor de CA para PWM; el cuarto es la tecnología de detección, los componentes de detección de retroalimentación de la etapa inicial no pueden cumplir con los requisitos de regulación de velocidad del motor de CA.
6 Tecnología de control de servomotor (servomotor)
6.1 Descripción general del sistema de servocontrol
Servo significa "servir" y "obedecer". Un sistema de servocontrol generalizado se refiere a un sistema de control de retroalimentación que rastrea o reproduce con precisión un determinado proceso, y también puede denominarse servosistema. En sentido estricto, el sistema de servocontrol significa que la cantidad controlada (cantidad de salida) es el desplazamiento lineal o desplazamiento angular de la carga. Cuando la posición dada la cantidad (cantidad de entrada) cambia arbitrariamente, el sistema genera la cantidad de salida de forma rápida y precisa. reproducir la cantidad de entrada El cambio, también conocido como sistema de seguimiento de posición.
1. Requisitos básicos del sistema de servocontrol Los
requisitos básicos del sistema de servocontrol son: ①buena estabilidad; ②alta precisión; ③respuesta dinámica rápida; ④fuerte capacidad antidisturbios.
2. Las características
características básicas del sistema de servocontrol son:
① Debe tener un sensor de alta precisión que pueda dar con precisión la señal eléctrica de la salida;
② El amplificador de potencia y el sistema de control deben ser reversibles;
③ Rango de ajuste de velocidad lo suficientemente grande y capacidad de carga a baja velocidad lo suficientemente fuerte;
④ Capacidad de respuesta rápida y fuerte capacidad antiinterferente.
3. Composición del sistema de servocontrol
La Figura 6-1 muestra el diagrama de bloques del sistema de servocontrol. Como puede verse en la figura, el sistema consta de cinco componentes principales: controlador, dispositivo de accionamiento, servomotor, mecanismo de transmisión mecánica y sensor .
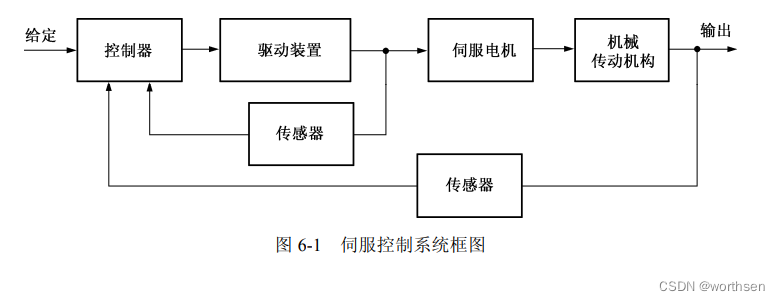
- Controlador
El controlador es la clave del sistema de servocontrol y la ley de control del sistema de servocontrol se refleja en el controlador. El controlador obtiene la señal de desviación de acuerdo con los requisitos de la tarea y la retroalimentación del sensor, y genera la señal de control del dispositivo de accionamiento a través del algoritmo de control necesario. - Dispositivo de accionamiento y servomotor
El dispositivo de accionamiento desempeña principalmente el papel de amplificación de potencia. Según los diferentes servomotores, el dispositivo de accionamiento controla el par y la velocidad del servomotor para satisfacer las necesidades reales del sistema de servocontrol. El servomotor es el actuador del servosistema y generalmente se utiliza para el control de transmisión de maquinaria de precisión. - Sensores
La precisión de detección y la exactitud de los sensores son fundamentales para el rendimiento de los sistemas de servocontrol. Por lo general, el controlador, el dispositivo de accionamiento y el circuito de preprocesamiento del sensor se integran para formar un producto estándar, concretamente el servoaccionamiento. - Actuadores mecánicos
Los actuadores mecánicos son la forma física directa de control. Para cumplir diversos requisitos funcionales, es inseparable de la garantía del mecanismo mecánico. La transmisión mecánica de alta precisión es una base sólida para un control preciso.
6.2 Modelo matemático del sistema de servocontrol
6.2.1 Modelo matemático del sistema de servocontrol de CC
1. Diagrama de estructura estática del sistema de servocontrol CC
2. Modelo matemático del sistema de servocontrol CC3
. Sistema de servocontrol CC con control de bucle de corriente
6.2.2 Modelo matemático del sistema de servocontrol de CA
1. Modelo matemático de servomotor de CA asíncrono orientado por varillaje de flujo del rotor2
. Un modelo unificado de objetos de control en un sistema de servocontrol de CA
6.3 Servocontrol de CA de motor síncrono de imán permanente
1. Motores síncronos de imanes permanentes
Los servomotores de CA se utilizan ampliamente en la automatización de fábricas porque superan las limitaciones impuestas por las escobillas y los conmutadores mecánicos de los servomotores de CC. En aplicaciones de baja potencia, como máquinas herramienta CNC y robots industriales, los servomotores síncronos con materiales de imán permanente se utilizan más ampliamente que los servomotores de jaula asíncronos, principalmente porque el rendimiento de los materiales modernos de imán permanente continúa mejorando y los precios continúan. Disminución. En comparación con el motor asíncrono, el control es relativamente simple y es fácil lograr un control excelente con un alto rendimiento.
2. Modelo matemático del sistema de servocontrol PMSM3
. Circuito equivalente del PMSM
4. Control de vectores de PMSM5
. PMSM ecuación de estado desacoplada
6.4 Diseño del sistema de servocontrol.
6.4.1 Diseño de un sistema de servocontrol de posición de bucle único
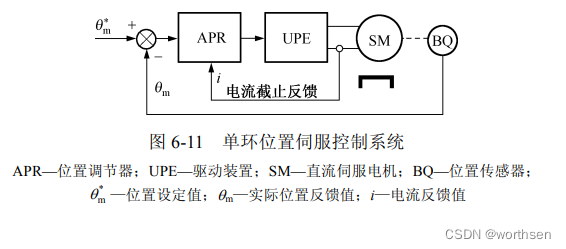
Para el servomotor de CC, se puede adoptar el método de servocontrol de posición de bucle único: diseñe directamente el regulador de posición APR , como se muestra en la Figura 6-11. Para evitar un impacto excesivo de la corriente durante el proceso de transición, se debe utilizar una protección de retroalimentación de corte de corriente o se debe seleccionar un servomotor con un múltiplo de sobrecarga permitido relativamente alto.
Debido a la naturaleza no lineal y de acoplamiento fuerte del servomotor de CA, es difícil que el método de servocontrol de posición de bucle único cumpla con los requisitos dinámicos del sistema de servocontrol, por lo que el servocontrol de posición de bucle único generalmente no se utiliza.
Como regulador de posición para corrección dinámica y seguimiento acelerado, a menudo se selecciona un regulador PD o PID, o se agrega retroalimentación diferencial de posición (es decir, retroalimentación de velocidad) sobre la base de la retroalimentación de posición. El uso del control diferencial tiene como objetivo mejorar la rapidez de la respuesta y el seguimiento. Si se requiere que el sistema no tenga diferencia estática con respecto a la perturbación de carga, se debe seleccionar un regulador PID .
6.4.2 Diseño de un sistema de servocontrol de doble bucle
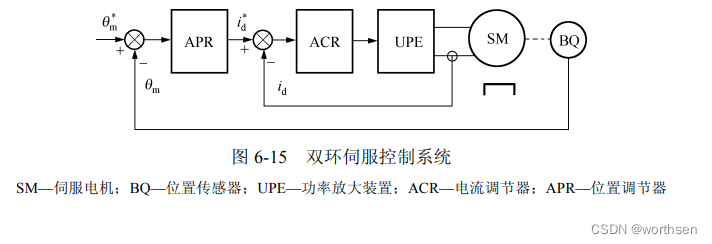
Como se mencionó anteriormente, el control del bucle de corriente puede suprimir la corriente de arranque y frenado y acelerar la respuesta de la corriente. Para el servomotor de CA, el bucle de corriente también puede transformar el objeto controlado, realizar el desacoplamiento del componente de excitación y el componente de par y obtener un modelo de motor de CC equivalente. Por lo tanto, sobre la base del bucle de corriente como bucle interno, el regulador de posición se puede diseñar directamente para formar el bucle externo, formando así un sistema de servocontrol de doble bucle de posición y corriente. Su estructura se muestra en la Figura 6-15.
6.4.3 Diseño del sistema de servocontrol de tres bucles
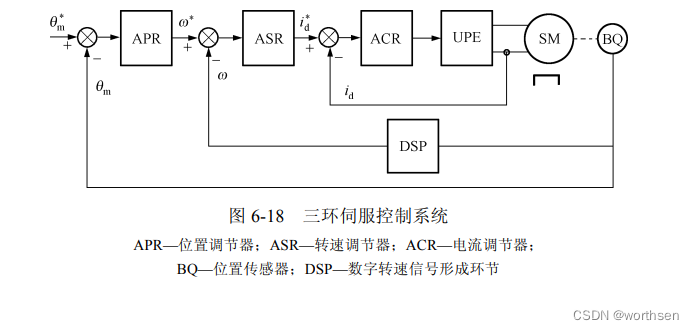
Sobre la base del sistema de servocontrol del bucle de posición y del bucle de corriente, configure un bucle de velocidad para formar un sistema de servocontrol de tres bucles, como se muestra en la Figura 6-18. Entre ellos, el regulador de posición APR es el dispositivo de corrección del bucle de posición y su valor límite de salida determina la velocidad máxima del motor.
6.4.4 Diseño del sistema de servocontrol PMSM
- Principales factores que afectan el rendimiento del bucle de corriente Los
principales factores que afectan el rendimiento del bucle de corriente son la interferencia de la fuerza contraelectromotriz, la influencia del regulador PI y la deriva del cero. - Diseño integral PI del bucle actual
6.5 Introducción a la aplicación de servoaccionamientos comerciales estándar
Los servoaccionamientos se han utilizado ampliamente como producto estándar. En la actualidad, hay muchas empresas que producen varios servomotores y servocontroladores de soporte, como Rexroth y Siemens en Alemania, Mitsubishi, Yaskawa, Panasonic, Omron en Japón y LG en Corea del Sur.
Cuatro modos de trabajo de los servoaccionamientos comerciales estándar:
(1) Modo de control de posición
(2) Modo de control de velocidad
(3) Modo de control de par
(4) Modo de control de circuito completamente cerrado
7 Tecnología de detección
7.1 Detección de desplazamiento lineal
7.1.1 Rejilla
Tarjeta de adquisición de datos y [codificador] [regla de rejilla] [adquisición de desplazamiento]
Una regla de rejilla es un tipo de codificador.
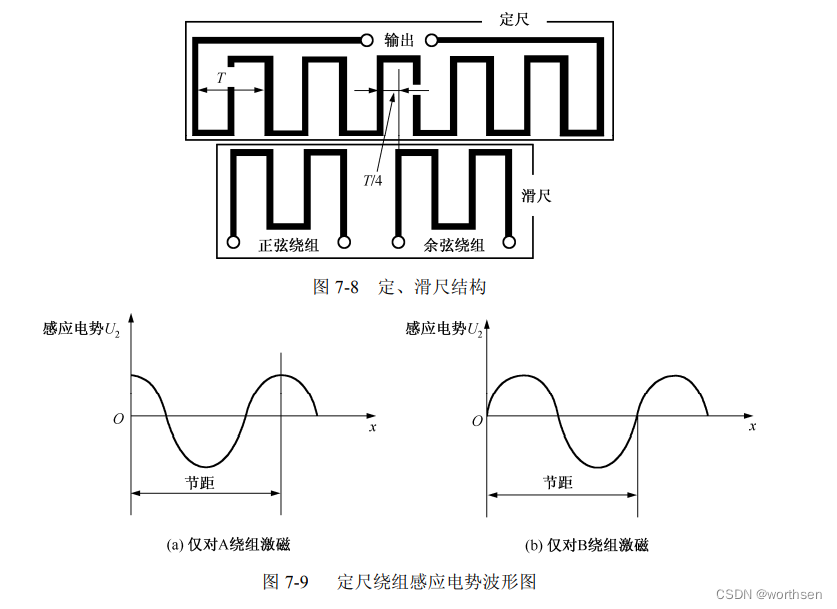
7.1.2 Inductosincronizador
El sincronizador inductivo es un sensor de desplazamiento que utiliza el principio de inducción electromagnética para convertir el desplazamiento entre dos devanados planos en una señal eléctrica.
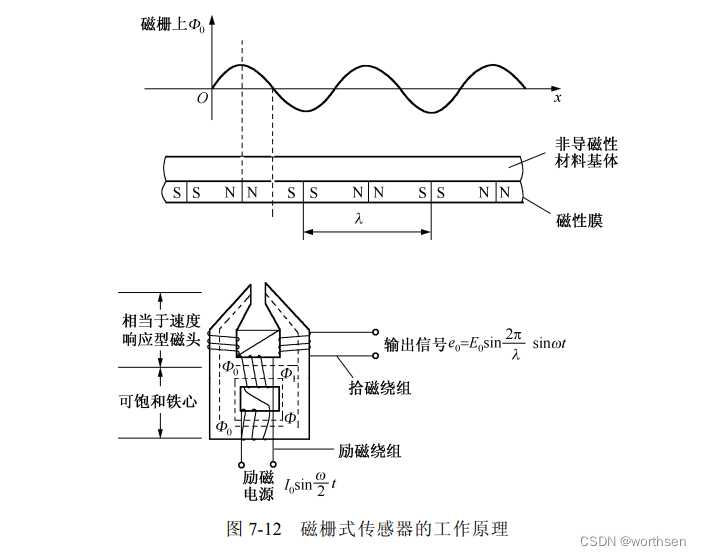
7.1.3 Sensor de rejilla magnética
El sensor de rejilla magnética es un sensor de desplazamiento que utiliza la interacción magnética entre la rejilla magnética y el cabezal magnético para realizar mediciones. Es un nuevo tipo de sensor digital de bajo costo y fácil instalación y uso. Cuando sea necesario, la señal magnética original (rejilla magnética) se puede borrar y volver a grabar. También se puede instalar en la máquina herramienta y luego registrar la señal magnética, lo cual es muy beneficioso para eliminar el error de instalación y el error geométrico de la propia máquina herramienta y mejorar la precisión de la medición. El sensor de rejilla magnética puede utilizar posicionamiento láser y grabación magnética en lugar de procesos fotosensibles, de corrosión y otros, por lo que la precisión es alta, de hasta ±0,01 mm/m, y la resolución es de 1-5 μm.
7.2 Detección de desplazamiento angular
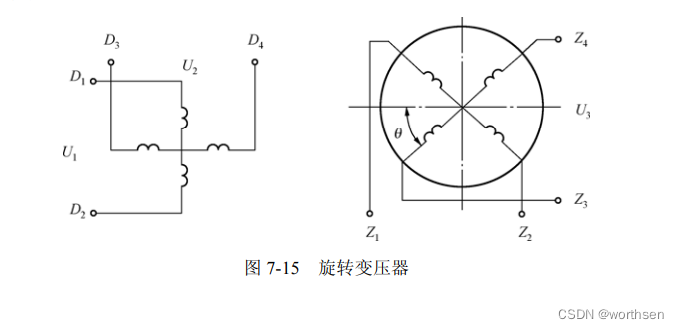
7.2.1 Resolutor
Un resolutor es un sensor que utiliza el principio de inducción electromagnética para transformar el ángulo de rotación en una señal de voltaje. Debido a su estructura simple, acción sensible, sin requisitos especiales para el medio ambiente, gran señal de salida y buena antiinterferencia, se usa ampliamente en productos mecatrónicos.
Los resolutores son adecuados para todas las ocasiones en las que se utilizan codificadores fotoeléctricos, especialmente en temperaturas altas, frío extremo, humedad, alta velocidad y otras ocasiones en las que los codificadores fotoeléctricos no pueden funcionar normalmente. Debido a las características anteriores del resolutor, se usa ampliamente en sistemas de servocontrol, sistemas robóticos, herramientas mecánicas, automóviles, energía eléctrica, metalurgia, textiles, imprenta, aeroespacial, barcos, armas, electrónica, metalurgia, minería, yacimientos petrolíferos. Conservación de agua, industria química, industria ligera, construcción y otros campos del sistema de detección de ángulo o posición.
7.2.2 Codificador fotoeléctrico
El codificador fotoeléctrico es un elemento de detección digital de ángulo de disco codificado. Tiene dos tipos básicos: codificador incremental y codificador absoluto . Los codificadores incrementales tienen las ventajas de una estructura simple, un precio bajo y una fácil garantía de precisión, por lo que actualmente son los más utilizados. Los codificadores absolutos pueden proporcionar directamente información digital correspondiente a cada ángulo de rotación, lo cual es conveniente para el procesamiento por computadora, pero cuando el número de alimentación es mayor que una revolución, se debe realizar un procesamiento especial y se deben conectar más de dos codificadores con engranajes reductores. para formar un dispositivo de detección de múltiples etapas, lo que hace que su estructura sea compleja y costosa.
1. Codificador incremental
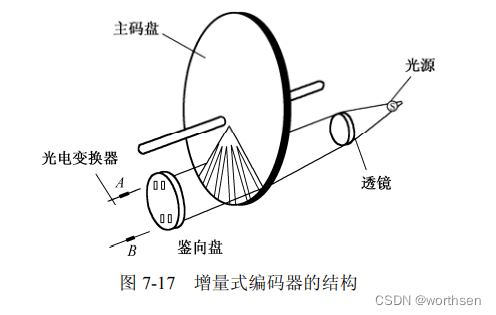
2. codificador absoluto
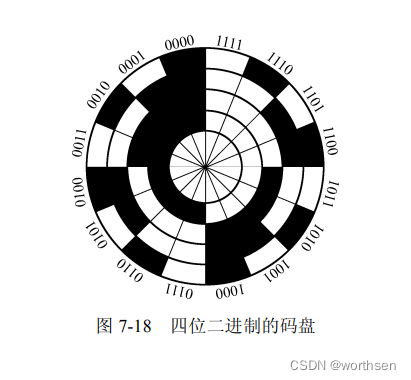
- Disco de código cíclico
El código cíclico se suele llamar código Gray, también es un código binario, sólo dos números "0" y "1". La Figura 7-19 muestra la rueda de código cíclico binario de cuatro dígitos. La característica de esta codificación es que sólo un bit de código cambia entre dos códigos adyacentes, es decir, "0" se convierte en "1" o "1" se convierte en "0". Por lo tanto, en el proceso de conversión de los dos números, el error de lectura generado no supera "1" como máximo, y solo es posible leer como uno de los dos números adyacentes. Por lo tanto, es un método eficaz para eliminar errores de no singularidad. Los pesos del sistema numérico representado por el disco de código de afuera hacia adentro son 2 0, 2 1, 2 2, 2 3 2^0, 2^1, 2 . ^2, 2^320、21、22、23 , el valor expresado es 0~15 o 0~F en hexadecimal. - Rueda de código cíclico binario con dispositivo fotoeléctrico de evaluación de bits
Este tipo de rueda de código agrega otra ronda de bits de señal al círculo más externo de la rueda de código cíclico binario de cuatro bits. La Figura 7-20 muestra la rueda de código de ciclo binario con un dispositivo fotoeléctrico de evaluación de posición. El bit de señal en el círculo más externo del disco de código está simplemente escalonado desde la línea de cruce de estado, y solo cuando el elemento fotoeléctrico donde se encuentra el bit de señal tiene una señal, puede leer, de modo que no se produzcan errores de no singularidad.
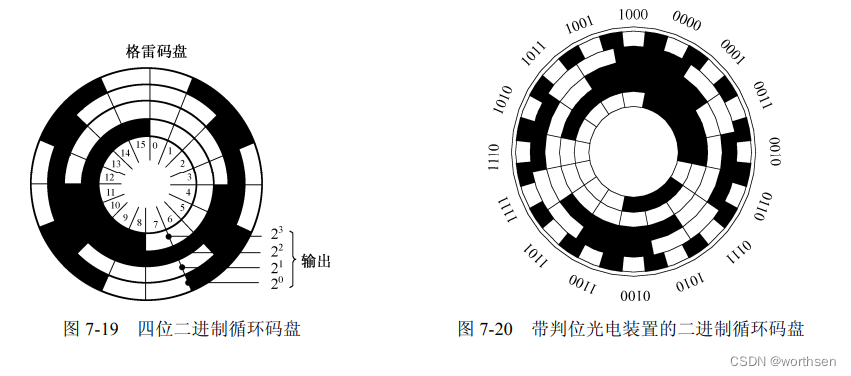
7.3 Detección de velocidad y aceleración
7.3.1 Tacogenerador CC
7.3.2 Sensor fotoeléctrico de velocidad
7.3.3 Sensor de aceleración
7.4 Detección de fuerza y momento
En ingeniería mecatrónica, la fuerza, la presión y el par son parámetros mecánicos muy utilizados. En los últimos años, han aparecido varios sensores de fuerza y torsión de alta precisión, que se han utilizado ampliamente por sus ventajas, como pequeña inercia, respuesta rápida, fácil registro y conveniente control remoto. Según su principio de funcionamiento, se puede dividir en tipo elástico, tipo de deformación por resistencia, tipo inductivo, tipo capacitivo, tipo piezoeléctrico y tipo magnetoeléctrico, etc., y los sensores de tipo de deformación por resistencia se utilizan ampliamente.
7.4.1 Célula de carga
7.4.2 Sensor de presión
7.4.3 Sensor de par
7.4.4 Sensor compuesto de fuerza y par
8 ejemplos de aplicación
Reponer
Fórmula integral
∫ abf ( x ) dx = F ( b ) − F ( a ) \int_a^bf(x)dx = F(b) - F(a)∫asegundof ( x ) dx _=F ( segundo )−F ( a )
Clasificación de motores
De
- Hematemesis organiza la explicación más fácil de entender sobre el control motor (2). ¿Conoce la diferencia entre BLDC y PMSM?
- 【Charla electromecánica 2】Características y diferencias de BLDC y PMSM
- Desarrollo de robots: introducción a los servomotores
- Desarrollo de robots: motores con escobillas versus motores sin escobillas
- Jefe del ejército de Zhuan Zhihui: [controlador FOC de fabricación propia] explica el algoritmo FOC y la tecnología SVPWM en términos simples
Los motores de CC con escobillas, los motores de CC sin escobillas y los motores síncronos de imanes permanentes también se aplican en diferentes ocasiones debido a su estructura y potencia específicas. Se puede ver una gran cantidad de motores de CC con escobillas y motores de CC sin escobillas en juguetes y electrodomésticos comunes, mientras que los motores síncronos de imanes permanentes se utilizan principalmente en vehículos eléctricos y servoindustriales de alta precisión .
En términos de precisión de control, la precisión de regulación de velocidad del servo es la más alta, seguida del paso a paso, y los motores con escobillas y sin escobillas de CC son los más bajos . Los servomotores se usan generalmente en ocasiones que requieren alta precisión, mientras que los motores sin escobillas solo se usan en lugares donde la precisión no es particularmente alta.El motor paso a paso está en el medio, pero la velocidad del motor paso a paso no es tan rápida como la de el motor sin escobillas.
Motores CC con escobillas y motores CC sin escobillas
El motor de CC con escobillas es el motor de CC más simple en estructura y control, y el motor se basa principalmente en escobillas para la conmutación de corriente. Utilice un relé electromagnético o un interruptor semiconductor para controlar su arranque y parada; si es necesario avanzar y retroceder, necesitará 4 dispositivos interruptores semiconductores para formar un puente H para controlar las corrientes directa e inversa. El uso de interruptores semiconductores puede realizar fácilmente la regulación de velocidad de motores con escobillas (ajuste mediante el control del ciclo de trabajo de PWM), por lo que básicamente, los MOSFET de potencia se utilizan para la regulación y el control de velocidad de motores con escobillas.
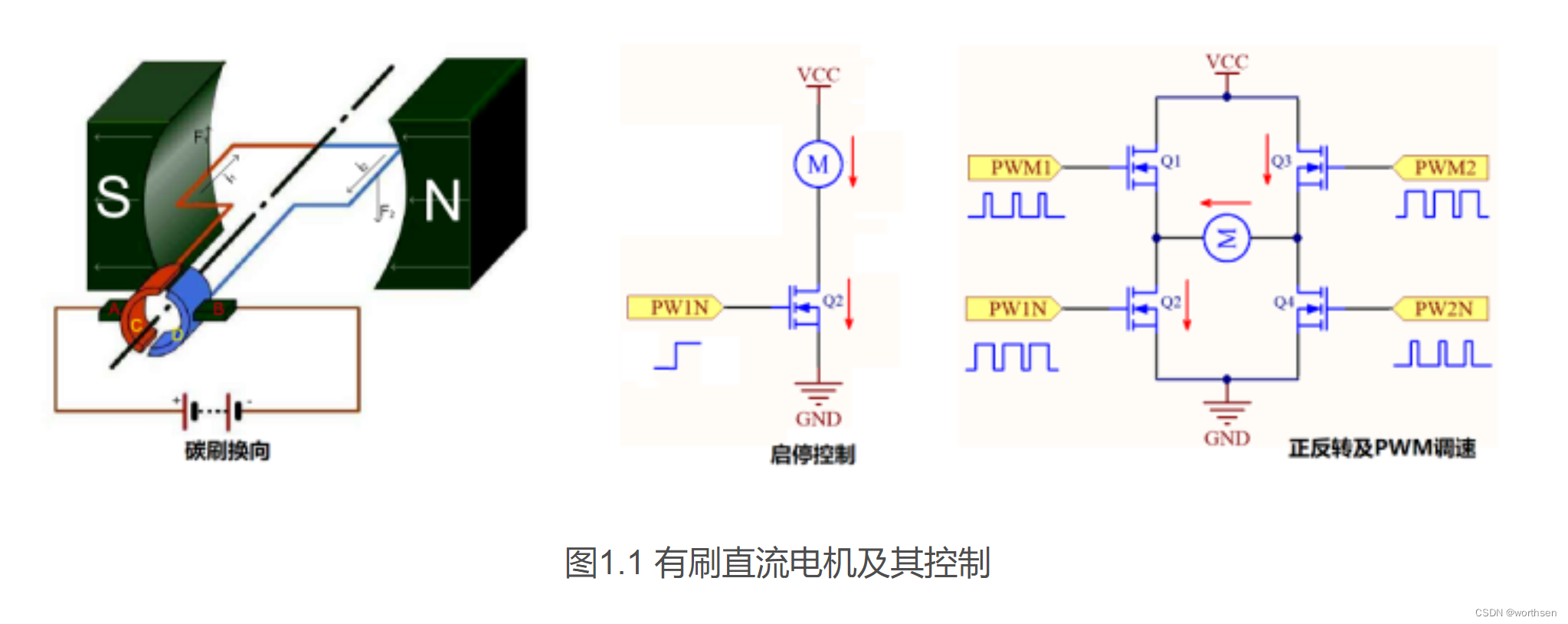
La escobilla de un motor con escobillas es una parte vulnerable, por lo que la vida útil del motor con escobillas es limitada y la chispa eléctrica liberada durante la conmutación de la escobilla de carbón no se puede utilizar en escenas con sustancias inflamables y explosivas como minas de carbón y petróleo. campos .
La aparición de los motores de CC sin escobillas (BLDC) se beneficia del desarrollo de semiconductores de conmutación y chips de control de motores. Los motores de CC sin escobillas cancelan la conmutación de las escobillas y utilizan semiconductores de potencia para la conmutación. La topología de conducción es casi trifásica de dos niveles. La estructura , que es lo que solemos llamar puente trifásico . Al controlar la secuencia de conducción y la dirección del puente trifásico, se genera el campo magnético del imán permanente del rotor de tracción y una posición relativamente estable (90°±30°) del campo magnético del estator y del campo magnético del rotor. se puede mantener durante el proceso de conmutación del puente trifásico, como se muestra en la Figura 1.2.
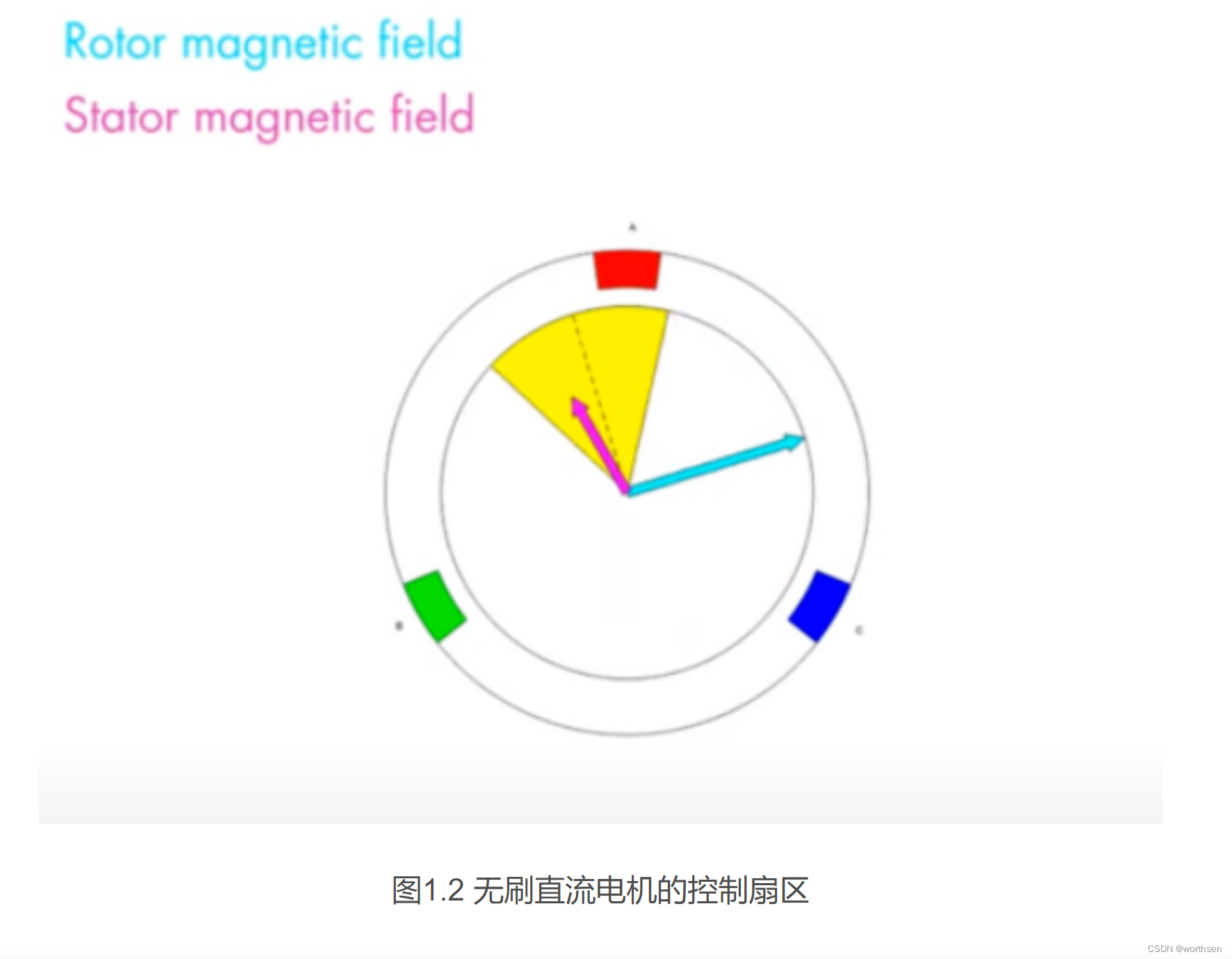
La fuerza electromagnética trasera de un motor de CC sin escobillas (BLDC) es una forma de onda trapezoidal, por lo que se puede utilizar un voltaje de CC con una forma de onda rectangular para generar un campo magnético giratorio con una ondulación de par baja. Dado que el voltaje rectangular aplicado es fácil de generar, por ejemplo, cualquier MCU, o DSP de la serie C2000 o incluso un microordenador de un solo chip 51 puede generar este tipo de onda PWM , por lo que el control y accionamiento del motor se vuelven simples y al mismo tiempo . Al mismo tiempo, el BLDC puede alcanzar la misma potencia de salida . Al igual que los drones, las máquinas de elución todo en uno, etc., solo necesitan regulación de la velocidad del motor, sin posicionamiento del servo y alta precisión de control. BLDC se utiliza para tales ocasiones con baja potencia y alta velocidad .
La diferencia entre BLDC y PMSM
BLDC (Brushless Direct Current Motor), es decir, motor DC sin escobillas.
PMSM (motor síncrono de imán permanente), es decir, motor síncrono de imán permanente.
El parámetro que realmente diferencia a los dos es el "back EMF".
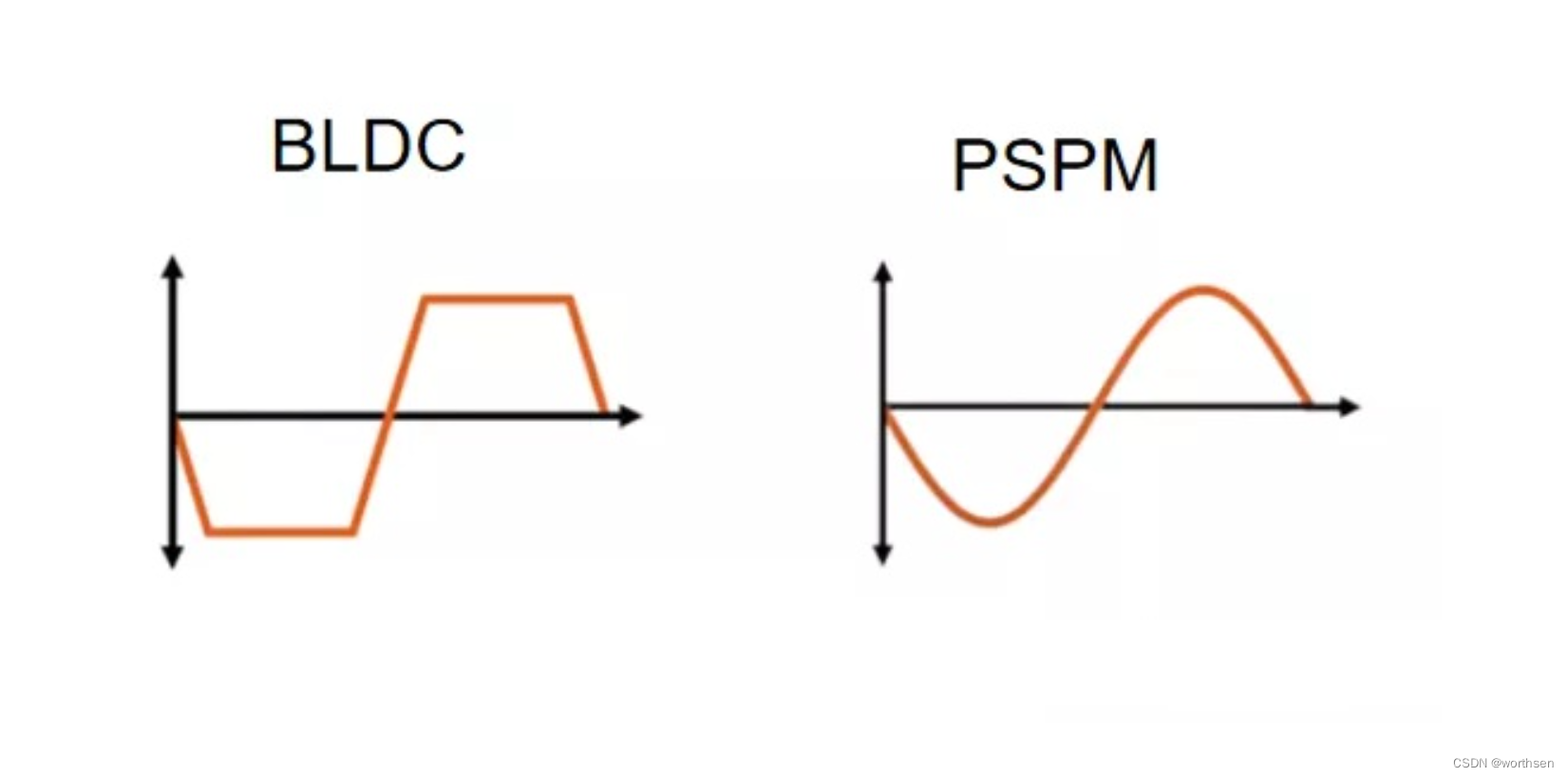
La forma de onda EMF posterior del BLDC es trapezoidal, mientras que la forma de onda EMF posterior del PMSM es sinusoidal . Por lo tanto, aunque todos son motores síncronos de imanes permanentes, para distinguirlos aún es necesario nombrarlos y distinguirlos, por lo que aparecen BLDC y PMSM, que se suelen decir en la actualidad.
Como se muestra en la Figura 2.2, sentimos aproximadamente las diferencias estructurales de los dos motores.
La estructura del motor CC sin escobillas es relativamente simple. La mayoría de las bobinas del estator adoptan la estructura de devanado centralizado que se muestra a la izquierda de la Figura 2.2. Esta estructura tiene un proceso simple y de bajo costo, y es la estructura de estator BLDC más utilizada.
Los devanados del estator de los motores síncronos de imanes permanentes están más "distribuidos y uniformes". Intuitivamente, el PMSM debería funcionar de forma más silenciosa y suave.
FOC y seis pasos
FOC
FOC (Control orientado a campo), la traducción literal es control orientado a campo, también conocido como control vectorial (VC, Vector Control), es actualmente el control más eficiente de motores CC sin escobillas (BLDC) y motores síncronos de imanes permanentes (PMSM) .Uno de los métodos. FOC tiene como objetivo controlar con precisión la magnitud y dirección del campo magnético, de modo que el par de movimiento del motor sea estable, el ruido sea bajo, la eficiencia sea alta y tenga una respuesta dinámica de alta velocidad.
Esquemas comunes:
- Codificador de posición: a través de la rejilla de alta precisión para detectar los cambios de código digital causados por la rotación del estator, a fin de analizar la información de posición del rotor, generalmente se usa en servosistemas de alta precisión.
- Codificador magnético Hall: mediante la rotación del imán permanente instalado en el extremo del eje del motor, la línea de inducción magnética del sensor Hall cambia, analizando así la información de posición del rotor, generalmente utilizado en sistemas de accionamiento de bombas de pequeña y mediana potencia.
- Resolver: La rotación del eje del motor provoca el cambio del voltaje inducido del resolutor, mediante un determinado algoritmo de decodificación se analiza la información de la posición del rotor, generalmente se utiliza en sistemas de vehículos eléctricos de alta confiabilidad y larga vida útil.
- Algoritmo de posición del observador: este es un método sin sensor de posición. El cambio de la fuerza electromotriz inversa se calcula mediante el modelado del modelo del motor, analizando así la información de posición del rotor. Este método tiene alta confiabilidad, bajo costo y fácil Mantenimiento Controla la dirección más caliente. El autor cree que esta solución reemplaza principalmente el mercado de aplicaciones del codificador Hall, y todavía es relativamente limitada para aplicaciones con alta precisión, alta confiabilidad y rendimiento dinámico rápido.
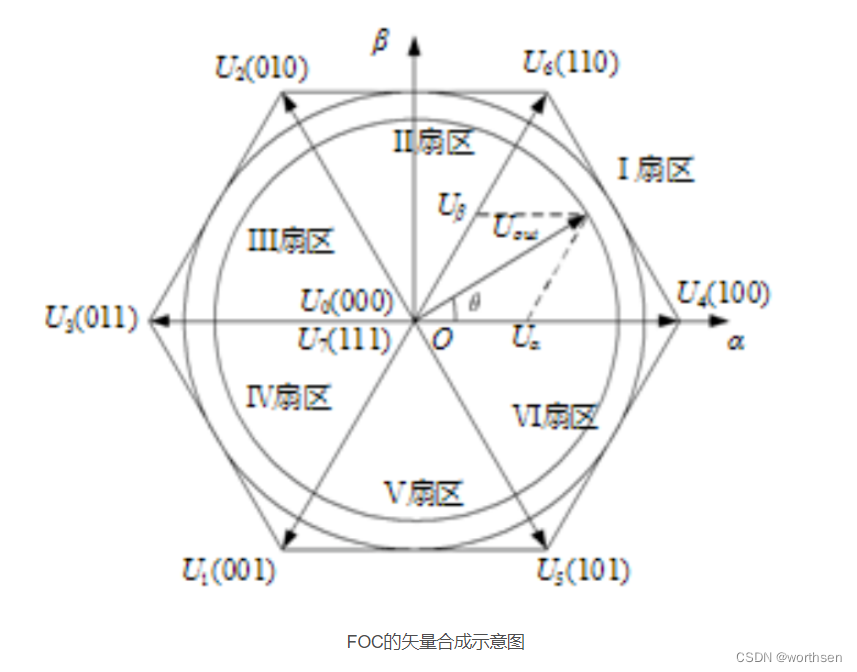
Seis pasos
Dado que la fuerza contraelectromotriz del BLDC es una onda trapezoidal, existe un "punto de inversión" muy rápido, por lo que es relativamente sencillo detectar la posición del BLDC: se puede incrustar un sensor Hall lógico en el estator para detectar la Posición del imán del rotor Posicionamiento directo; la detección de posición sin sensores también es posible detectando el punto de conmutación de la fuerza electromotriz inversa.
La esencia de este control sigue siendo el control lógico de encendido basado en información de posición, por lo que este método de control tiene requisitos de chips extremadamente bajos y no requiere costos adicionales de sensores, por lo que es el esquema de control más convencional para BLDC. Sin embargo, la granularidad del control es muy grande. En términos generales, la ondulación del par y el ruido son relativamente grandes. Para aplicaciones de alta potencia y alto rendimiento, la frecuencia de aparición es relativamente pequeña.
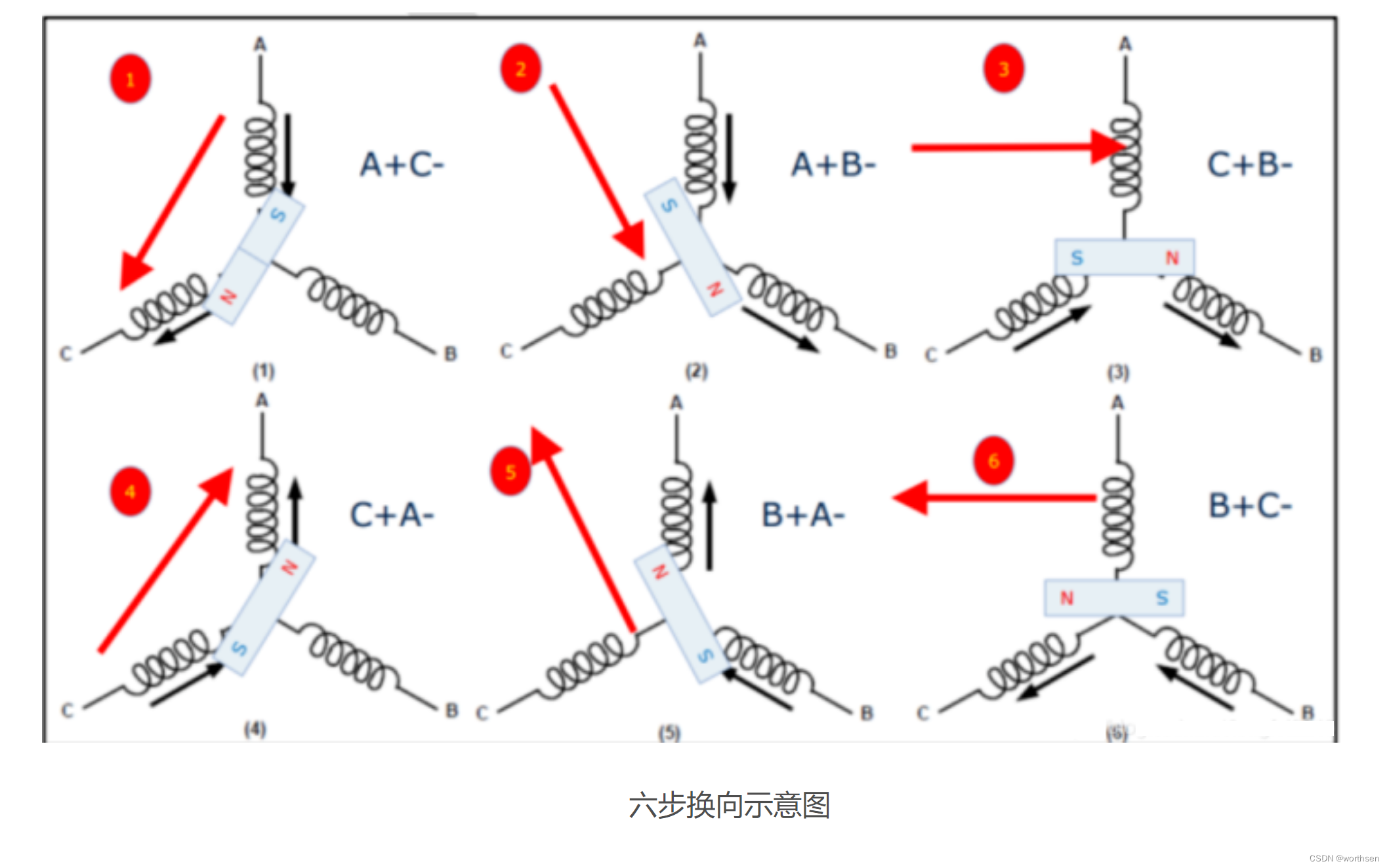
La diferencia entre el controlador FOC y el ESC sin escobillas
El controlador electrónico de velocidad (ESC) se utiliza para accionar el motor sin escobillas del UAV, que es lo que a menudo llamamos ESC .
El ESC usa una onda cuadrada para controlar el motor y el control es simple, pero el sonido es fuerte y la precisión es baja; el
FOC usa una onda sinusoidal para controlar el motor, el control es complicado, el sonido es pequeño y la precisión es alta.
referencia
1. Wiki-Motion Control
2. "Motion Control System" editado por Banhua Li Changyou
3. Fuerza bruta y deducción estricta de la fórmula básica de la integral
4. La esencia del cálculo (8): el teorema básico de la integral y el cálculo
5. Curva de trayectoria en control de movimiento
6. ¿Hablando de "Control de movimiento" "Control de movimiento, Control de procesos, Control dinámico, Planificación de movimiento, Planificación de trayectoria, Planificación de ruta"
, 8. 【Charla miscelánea 2】Características y diferencias entre BLDC y PMSM 9. ¿Por qué los motores de aeromodelismo utilizan BLDC en lugar de PMSM? 10. Desarrollo de robots: introducción a los servomotores 11. Desarrollo de robots: motores con escobillas y motores sin escobillas 12. El jefe de Zhuan Zhihui Jun: [controlador FOC hecho a sí mismo] explica el algoritmo FOC y la tecnología SVPWM en términos simples 13. Adquisición de datos tarjeta y [codificación Sistema de control de movimiento robótico (1): descripción general16.Control y sistema de movimiento15.Mi comprensión del sistema de control de movimiento14. Qué es un sistema de control de movimiento?