Directorio de artículos
- prefacio
- 1. El concepto de sensor
- En segundo lugar, la clasificación de los sensores.
- Tres, las características básicas del sensor.
- Cuarto, el método de análisis del dominio de frecuencia del sensor.
- Resumir
prefacio
Este artículo explica principalmente el contenido general del sensor,
el concepto del sensor, la clasificación del sensor, las características básicas del sensor, la calibración del sensor, el estado actual de la tecnología del sensor.
1. El concepto de sensor
1. Conceptos básicos
(1) Definición 1:
Un sensor es un dispositivo o dispositivo que puede detectar un valor medido específico y convertirlo en una señal de salida utilizable de acuerdo con ciertas reglas.
Nota:
En algunas disciplinas, los sensores también se denominan elementos sensibles, detectores, convertidores, etc.
(2) Definición 2:
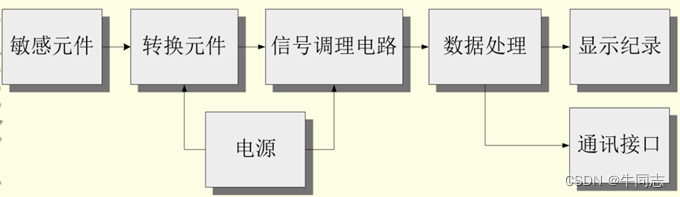
Un dispositivo o dispositivo que puede detectar (o responder) a un valor medido específico y convertirlo en una salida de señal utilizable de acuerdo con ciertas reglas. El sensor suele estar compuesto por un elemento sensible que responde directamente al elemento medido, un elemento de conversión que produce una salida de señal utilizable y un circuito electrónico correspondiente.
(3) Definición 3:
Un sensor es un dispositivo de medición que convierte el objeto medido en una determinada cantidad física que
tiene una relación correspondiente definida con cierta precisión y es fácil de aplicar.
(4) Definición 4:
En un sentido amplio, un sensor es un tipo de transductor y un transductor es un dispositivo que convierte energía de una forma a otra. Los transductores incluyen tanto sensores como actuadores.
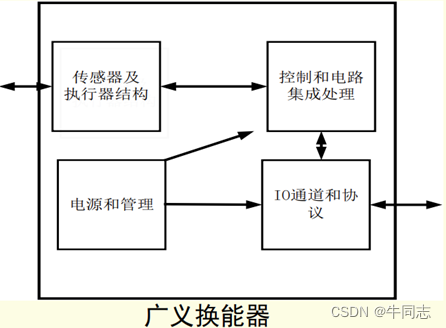
2. Composición básica del sensor.
En segundo lugar, la clasificación de los sensores.
Los sensores son productos intensivos en conocimiento y tecnología, y sus tipos son muy diversos, los principales métodos de clasificación son:

1. Según el mecanismo de las leyes físicas.
结构型传感器
物性型传感器
复合型传感器
2. Según el modo de alimentación del circuito.
无源传感器
有源传感器
3. Clasificación por principio
电参量式传感器;
磁电式传感器;
压电式传感器;
光电式传感器;
气电式传感器;
热电式传感器;
波式传感器;
射线式传感器;
半导体式传感器;
其他原理的传感器;
4. Clasificados por finalidad
温度传感器;
光敏传感器;
力敏传感器;
磁敏传感器;
气体传感器;
湿度传感器;
声敏传感器;
流量传感器;
生物传感器;
5. Según el modo de salida de señal.
Sensor analógico
Sensor digital
Tres, las características básicas del sensor.
1. Funciones estáticas
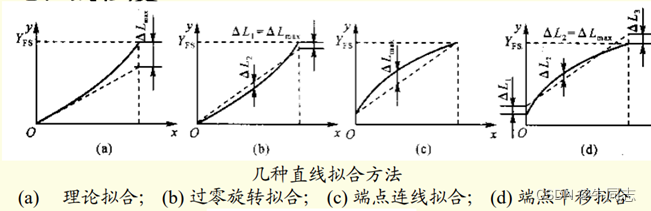
(1) Linealidad
Si no se consideran factores como la histéresis y la fluencia , la relación entre la salida y la entrada del sensor se puede expresar como el siguiente polinomio:
y = a 0 + a 1 x + a 2 x 2 + a 3 x 3 + . . + anxny=a_0+ a_1x+a_2x^2+a_3x^3+...+a_nx^ny=a0+a1X+a2X2+a3X3+...+anorteX
La desviación entre la curva característica real del sensor y la línea recta de ajuste se denomina error no lineal:δ = ± Δ L max YFS × 100 % (error no lineal) Δ L max: la desviación máxima entre la curva real y la curva de ajuste YFS: salida de rango completo
d=±YFSPERDIDO _máx _×100%( error no lineal )PERDIDO _máx _:Desviación máxima entre la curva real y la curva ajustadaYFS:salida a escala completa
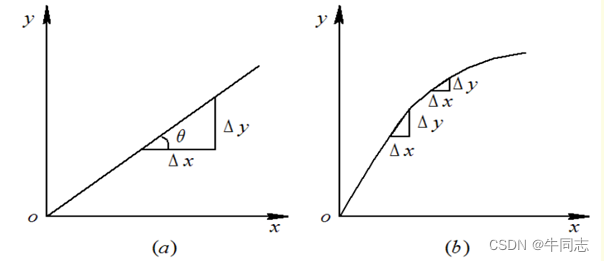
(2) Sensibilidad
La sensibilidad se puede medir mediante la derivada de cada punto de la curva entrada-salida.
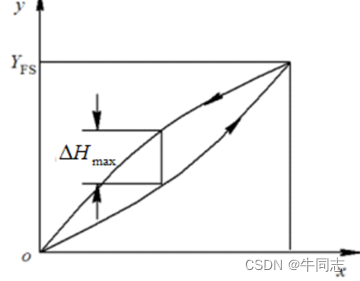
(3) Histéresis
δ H = ± Δ H max YFS × 100 % (error no lineal) Δ H max : desviación máxima de salida del rango positivo y negativo YFS : salida de escala completa \delta_H =\pm\frac{\Delta H_{max}}{ Y_{FS }}\times100\%\quad (error no lineal)\\\Delta H_{max}: desviación máxima de salida de rangos positivos y negativos\\Y_{FS}: salida a escala completadh=±YFSΔH _máx _×100%( error no lineal )ΔH _máx _:Desviación máxima de salida de rango positivo y negativoYFS:salida a escala completa
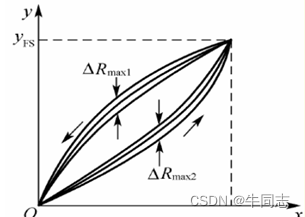
(4) Repetibilidad
δ K = ± Δ R max YFS × 100 % (error no lineal) Δ R max : la desviación máxima de salida del mismo sensor para repetir la misma medición YFS : salida de escala completa \delta_K =\pm\frac{\Delta R_ {max}}{ Y_{FS}}\times100\%\quad (error no lineal)\\\Delta R_{max}: la desviación de salida máxima del mismo sensor repitiendo la misma medición\\Y_{FS}: salida a escala completadk=±YFSΔR _máx _×100%( error no lineal )ΔR _máx _:Desviación máxima de salida para la misma medición repetida del sensor uniformeYFS:salida a escala completa
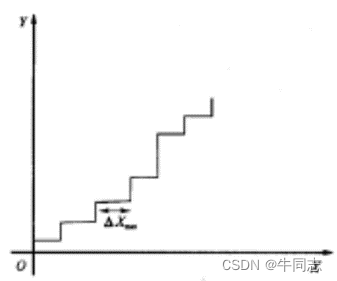
(5) Resolución
δ X = Δ X max YFS × 100 % (error no lineal) Δ X max : cambio de medición máximo requerido por unidad de salida YFS : salida a escala completa \delta_X =\frac{\Delta X_{max}}{Y_{FS }} \times100\%\quad (error no lineal)\\\Delta X_{max}: cambio de medición máximo requerido para la salida unitaria\\Y_{FS}: salida a escala completadX=YFSΔX _máx _×100%( error no lineal )ΔX _máx _:Cambio de medición máximo requerido por unidad de salidaYFS:salida a escala completa
(6) Estabilidad de la temperatura
α T = Y 2 − Y 1 YFS Δ T × 100 % (error no lineal) Y 1 , Y 2 son los valores de salida a las temperaturas T 1 y T 2 respectivamente YFS: salida a escala completa Δ T = T 2 − T 1 \ alpha_T =\frac{Y_2-Y_1}{Y_{FS}\Delta T }\times100\%\quad (error no lineal)\\Y_1, Y_2 son los valores de salida a las temperaturas T_1 y T_2 respectivamente\\Y_{FS} :Salida a escala completa\\\Delta T=T_2-T_1at=YFSΔT _Y2−Y1×100%( error no lineal )Y1,Y2son la temperatura T1,t2valor de salida cuandoYFS:salida a escala completaΔT _=t2−t1
2. Características dinámicas
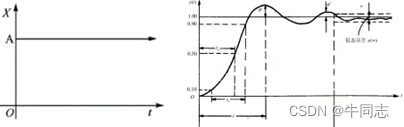
(1) (Paso) Características de respuesta transitoria
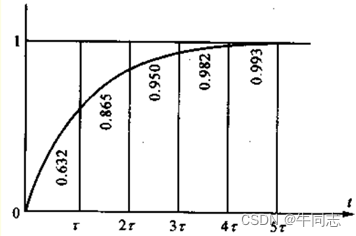
(2) Respuesta transitoria unitaria (paso) de un sensor de primer orden
τ dy ( t ) dt + y ( t ) = x ( t ) \tau\frac{\mathrm{d} y(t)}{\mathrm{d} t}+y(t)=x(t)td td y ( t )+y ( t )=x ( t )
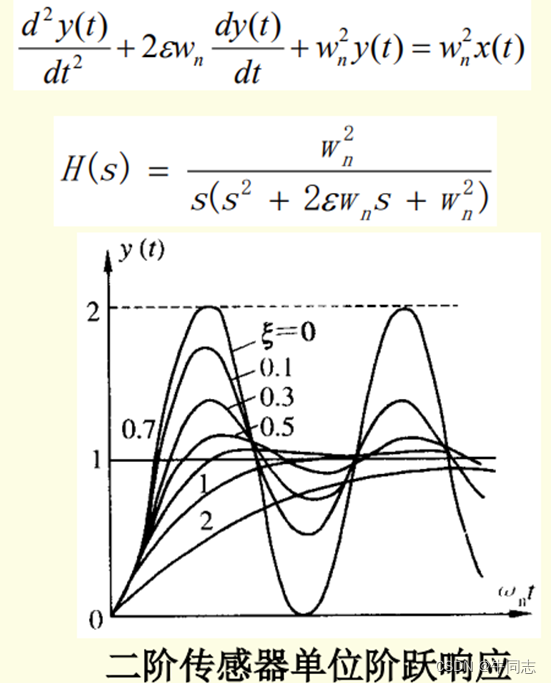
(3) Respuesta transitoria unitaria (paso) de un sensor de segundo orden
(4) Parámetros característicos en el proceso de transición de respuesta escalonada
时间常数τ
上升时间tr
响应时间ts
振荡次数N
稳态误差e
Cuarto, el método de análisis del dominio de frecuencia del sensor.
1. Modelo matemático del sensor.
Modelo matemático del sistema sensor de orden n

Si la señal de entrada es una onda sinusoidal X ( t ) = A sin ( ω t ) X(t)=Asin(ωt)X ( t )=Como en ( ω t ) , después de la transformada de Fourier

2. Respuesta de frecuencia del sensor de primer orden.
(1) Función de transferencia
H ( jw ) = 1 τ ( jw ) + 1 H(jw)=\frac{1}{\tau(jw)+1}H ( jw ) _=t ( j w )+11
(2) Características amplitud-frecuencia
A ( w ) = 1 1 + ( w τ ) 2 A(w)=\frac{1}{\sqrt{1+(w\tau)^2}}Una ( w )=1+( w τ )21
(3) Características de frecuencia de fase
Θ ( w ) = − arctan ( w τ ) \Theta(w)=-arctan(w\tau)Θ ( w )=− a rc t an ( w τ )
3. Respuesta de frecuencia del sensor de segundo orden.
(1) Función de transferencia
H ( jw ) = 1 1 − ( ww 0 ) 2 + 2 j ε ww 0 H(jw)=\frac{1}{1-(\frac{w}{w_0})^2+2j\varepsilon \frac {w}{w_0}}H ( jw ) _=1−(w0w)2+2 je _w0w1
(2) Características amplitud-frecuencia
A ( w ) = 1 [ 1 − ( ww 0 ) 2 ] 2 + ( 2 ε ww 0 ) 2 A(w)=\frac{1}{\sqrt{[1-(\frac{w}{w_0} )^2]^2+(2\varepsilon\frac{w}{w_0})^2}}Una ( w )=[ 1−(w0w)2 ]2+( 2 miw0w)21
(3) Características de frecuencia de fase
Θ ( w ) = − arctan ( 2 ε ww 0 1 − ( ww 0 ) 2 ) \Theta(w)=-arctan(\frac{2\varepsilon\frac{w}{w_0}}{1-(\frac {w}{w_0})^2})Θ ( w )=- a rc t an (1−(w0w)22 miw0w)
Resumir
Los lectores pueden corregirme si el artículo es inapropiado.