Tabla de contenido
1. La teoría básica del algoritmo PID
1.1 Concepto básico del control PID
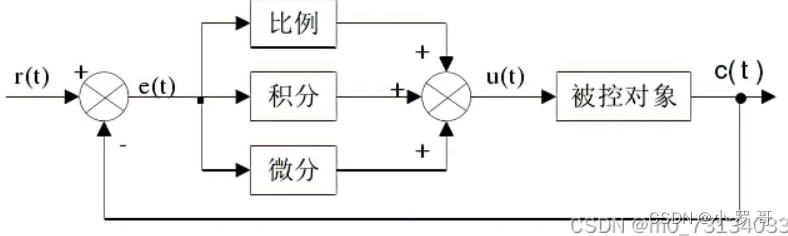
1.3 Diagrama esquemático del sistema de control PID
2. Cree un modelo de controlador PID y ajuste los parámetros en simulink
1. La teoría básica del algoritmo PID
1.1 Concepto básico del control PID
El controlador PID es un controlador paralelo proporcional, integral y diferencial. Es el tipo de controlador más utilizado. En el controlador PID, su modelo matemático consta de tres partes: proporcional, integral y diferencial.
1.2 Fórmula básica
El control PID es un tipo de control lineal, que es la desviación de control compuesta por el valor dado y el valor real:
La proporción (P), integral (I) y diferencial (D) de la combinación lineal forman la cantidad de control, y el objeto controlado es controlado. Su expresión de simulación es:
en:
Una salida del controlador.
Una entrada del controlador, que es la diferencia entre el valor dado y el valor de salida del objeto controlado, llamada señal de desviación.
Un factor de escala para el controlador.
Tiempo integral de un controlador.
Tiempo derivado de un controlador.
La forma de la función de transferencia es:
En la fórmula anterior, es el coeficiente proporcional,
es la constante de tiempo integral y
es la constante de tiempo diferencial.
1.3 Diagrama esquemático del sistema de control PID
2. Cree un modelo de controlador PID y ajuste los parámetros en simulink
Xiao Luoge utilizará dos métodos diferentes en simulink para construir un controlador PID para controlar un sistema simple de segundo orden.
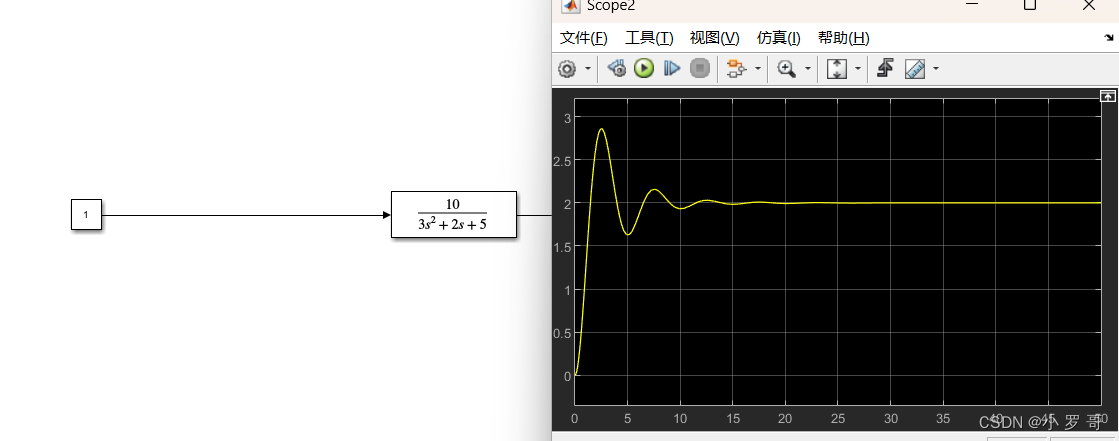
Sin agregar ningún controlador, podemos ver que este sistema tiene un tiempo de establecimiento más lento y picos más altos.
(1) El primer método consiste en utilizar los módulos de ganancia, integrador y derivado proporcionados por simulink para formar un controlador PID y, a continuación, utilizar el módulo Transfer Fcn para proporcionar la función de transferencia. El resultado final se puede observar con el módulo Scope. En el sistema, ingresamos la señal 1.
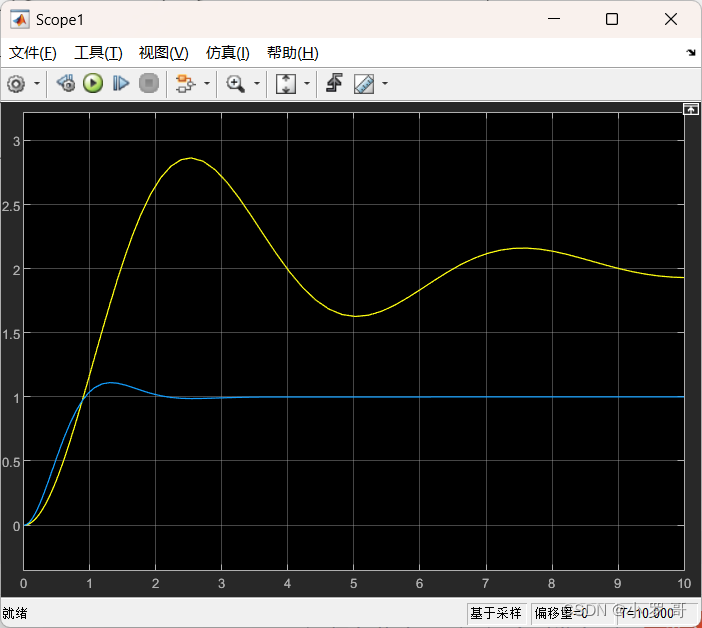
En la parte superior de la función de transferencia en la figura, PID no se usa para el control Se puede ver claramente a partir de los resultados que el control PID ha mejorado mucho para todo el control, cumpliendo con nuestros requisitos para un control rápido, estable y preciso. sistema.

El uso de este método para construir un controlador es relativamente primitivo, y también requiere una cierta cantidad de experiencia y tiempo al ajustar los parámetros. Al ajustar los parámetros, generalmente configuro los enlaces integral y diferencial a cero primero, ajusto el enlace proporcional primero y luego haga el enlace diferencial Ajuste la integral a cero y ponga la derivada al final.
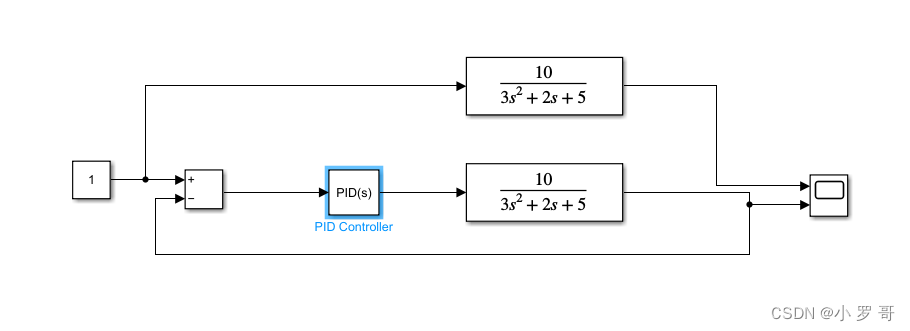
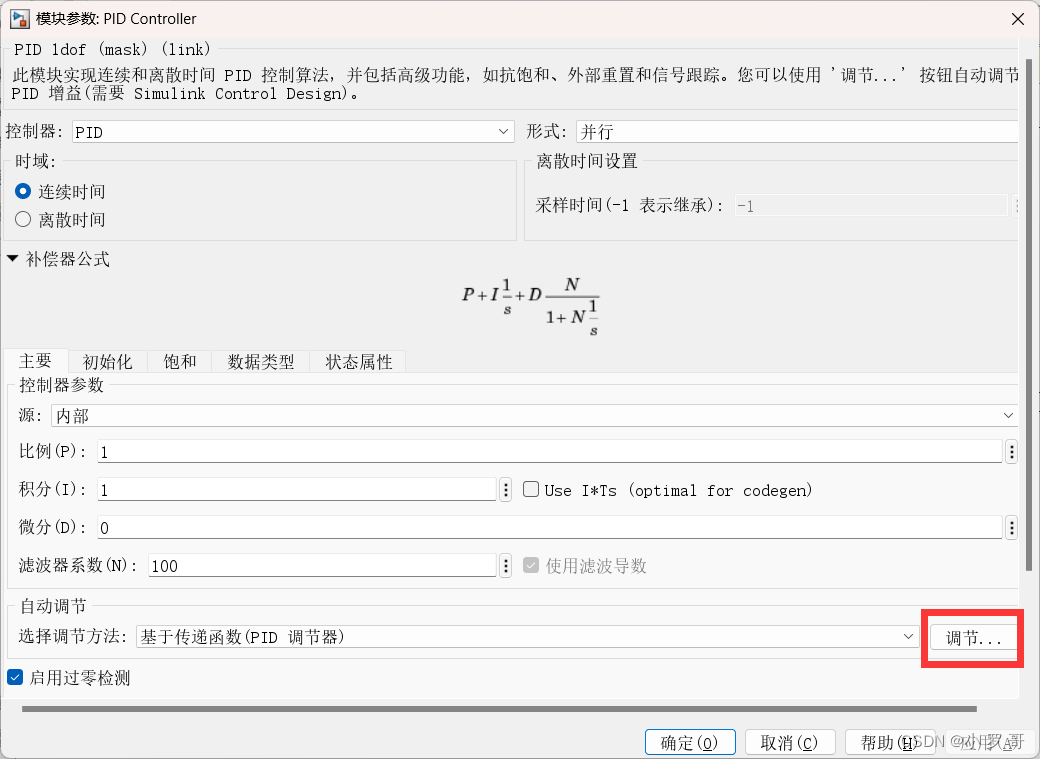
(2) Use el módulo de control PID que viene con simulink.
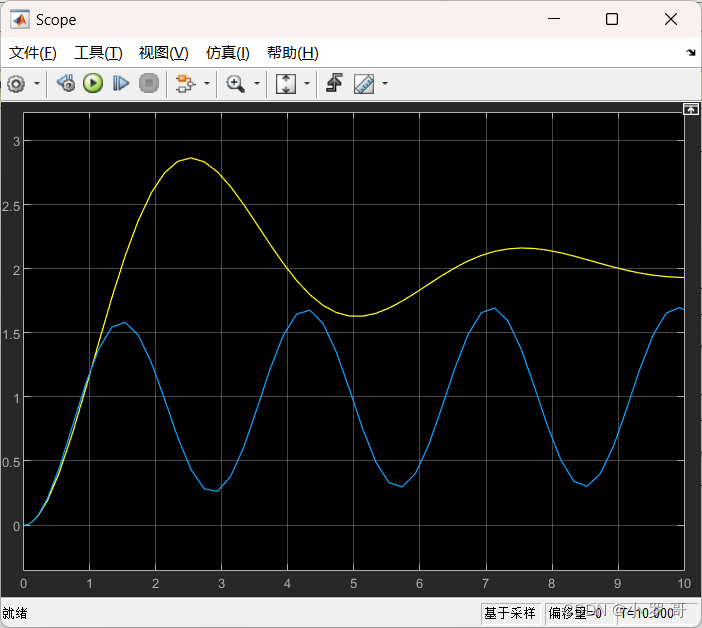
El método (1) es bastante problemático para aquellos que son nuevos en PID, por lo que podemos usar el módulo PID para el control en simulink.La única ventaja de este módulo es que puede ajustar los parámetros automáticamente. La función de transferencia en la parte superior de la figura es el sistema de control sin usar ningún controlador, mientras que en la parte inferior usamos el controlador PID Controller.
Podemos ver que la línea azul es el gráfico donde usamos el módulo PID sin ningún ajuste de parámetros.
Aquí podemos hacer doble clic en el módulo PID, elegir hacer clic en el botón de ajuste en el ajuste automático, MATLAB puede ser un poco lento al abrir la interfaz de ajuste, espere pacientemente.
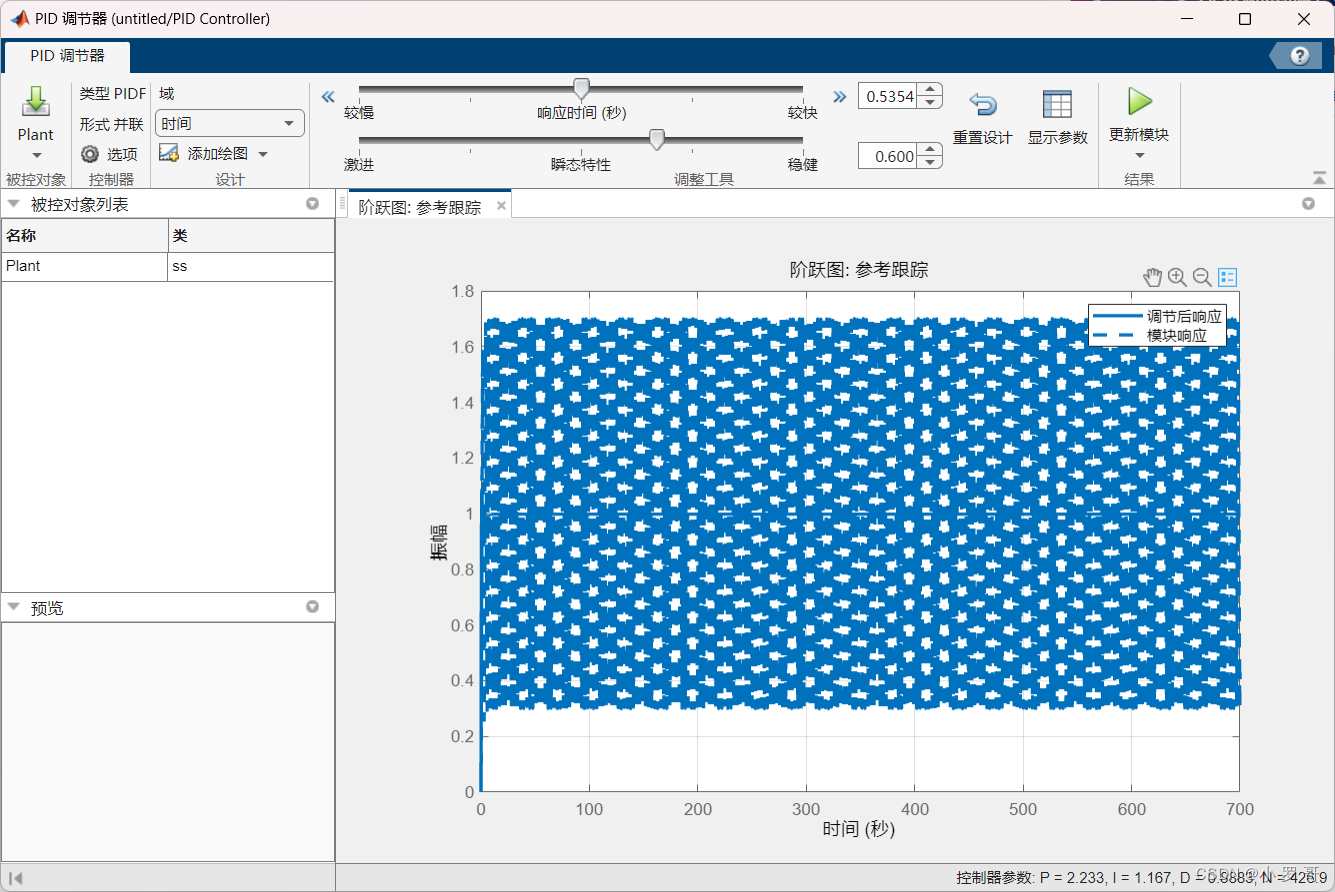
Aquí, podemos hacer clic en Restablecer diseño para ajustar automáticamente los parámetros. Puede ver que la línea punteada es la curva sin ningún ajuste en nuestro sistema original, y la línea continua es la curva obtenida usando el algoritmo PID. En esta interfaz, también puede ajustar intuitivamente el tiempo de respuesta y las características transitorias, después de completar el ajuste, solo necesita hacer clic para actualizar el módulo

Volviendo a la interfaz de configuración del módulo PID, podemos ajustar P, I o D. Al final del artículo, tengo nueva experiencia en el ajuste de parámetros. Si hay deficiencias, por favor critíquenme y corríjanme.

3. Ajustar parámetros
Al ajustar los parámetros, generalmente pongo los enlaces integral y diferencial a cero primero, ajusto el enlace proporcional primero, luego ajusto la integral a cero con el enlace diferencial y pongo el diferencial al final.
(1) Enlace proporcional: Refleja la señal de desviación e(t) del sistema de control en proporción. Una vez que ocurre la desviación, el controlador inmediatamente tiene un efecto de control, haciendo que la cantidad de control cambie en la dirección de reducir la desviación. La fuerza de la acción de control depende de la proporción Cuanto mayor sea el coeficiente ,
más corto será el proceso de transición y menor será el error de estado estacionario del resultado del control; pero
cuanto mayor sea el valor, mayor será el sobreimpulso, más fácil será generar vibración, lo que conducirá a un peor rendimiento dinámico e incluso hará que el sistema de circuito cerrado sea inestable. Por lo tanto, el coeficiente proporcional
debe seleccionarse correctamente para lograr el efecto de menor tiempo de transición, pequeño error de estado estable y estabilidad.
(2) Enlace integral: se utiliza principalmente para eliminar la desviación.Mientras haya una desviación, su efecto de control continuará acumulándose y el valor de control se emitirá para eliminar la desviación. Se puede ver que la función de la parte integral puede eliminar la desviación del sistema. Sin embargo, la acción integral tiene características de histéresis.Si la acción de control integral es demasiado fuerte, el sobreimpulso del sistema aumentará, el rendimiento dinámico del control se deteriorará e incluso el sistema de circuito cerrado será inestable. El tiempo de integración tiene una gran influencia en la acción de la parte integral. Cuando
es más grande, la acción integral es más débil.En este momento, es beneficioso reducir el sobreimpulso del sistema, y el proceso de transición no es fácil de generar oscilación. Pero lleva mucho tiempo eliminar el error.
Cuando es menor, el efecto integral es más fuerte. En este momento, puede ocurrir una oscilación durante la transición del sistema y el tiempo requerido para eliminar el error es relativamente corto.
(3) enlace de diferenciación: refleja la tendencia de variación de la señal de desviación, y el control diferencial puede obtener la tendencia de variación de la desviación.El aumento de la función de control diferencial puede acelerar la respuesta del sistema, reducir el exceso, superar la oscilación, y mejorar la estabilidad del sistema, pero el sistema Capacidad reducida para suprimir la interferencia. La fuerza de la parte diferencial está determinada por el tiempo diferencial.
Cuanto más grande es,
más fuerte es su efecto inhibidor del cambio, y cuanto más pequeño es, más débil es
su efecto de resistencia al cambio.
Tiene un gran impacto en la estabilidad del sistema.