1. Determinante
1. Determinante digital
- Cálculo del determinante numérico
- Cálculos de bloques con subtipos cero
2. La naturaleza del determinante
|A|=|A^T|- Cambia la fila y la columna, el valor del determinante cambia de signo
- Proponer o multiplicar con factores comunes
- Sumar K veces una fila a otra fila deja el valor del determinante sin cambios.
- El determinante se puede dividir según una determinada fila o una determinada columna.
3. Determinante abstracto
-
determinante de orden n o de orden superior
Se deben dominar los determinantes clave regulares
-
Contiene números específicos, posiblemente expandidos o recursivos.
-
Generalmente, los que tienen el mismo valor se agrupan a un lado y se combinan para el cálculo.
4. Propiedades computacionales
|A*|=|A| n-1
|A**|=|A| (n-1) vía
Una matriz es una matriz ortogonal, y el valor del determinante es <0, entonces sus valores propios deben tener -1.
2. Matriz
1. Funcionamiento básico de la matriz
Ejemplo clásico:
- A tiene rango 1
- (E+A) La expansión del teorema del binomio para n
- |A| norte
- Suma del coeficiente de expansión del teorema binomial
Para ver ejemplos de preguntas, vea el video de Century Higher Education.
2. Operación de energía de matriz
Generalmente, se utiliza la multiplicación acumulativa de P -1 BP
3. Transformación elemental de matriz
La matriz A sufre un número finito de cambios elementales para obtener B, entonces A y B son equivalentes; las relaciones provocadas por la equivalencia son solo reversibilidad simultánea, el mismo rango e iguales valores determinantes, excluyendo la correspondiente relación de valores propios. (Entonces, en la matriz, el lugar donde la similitud es "más grande" que el equivalente es que los valores propios correspondientes de las dos matrices similares también son iguales)
4. Matriz adjunta y matriz invertible
- Preste atención a la correspondencia entre los elementos de la matriz complementaria y la matriz original
- Generalmente implica agregar la matriz de identidad para participar en la operación de simplificación.
- Algunas fórmulas para recordar
Consejos: Encuentre el valor del determinante después de algunas operaciones de matriz, no se vea afectado por el determinante, primero tome la operación de matriz en el "valor absoluto" para simplificar, generalmente es una matriz abstracta, y el resultado saldrá después de la la simplificacion es correcta
Importancia del rango (propiedad olvidable):
- |r(A)-r(B)|<=r(A+/-B)<=r(A)+r(B)
5. Ecuación matricial
Consulte la siguiente parte del sistema de ecuaciones lineales
3. Vectores
1. Operaciones vectoriales
- Suma (resta como suma de números negativos)
- Multiplicación de números (división como multiplicación de fracciones)
- producto interno (operación única en vectores)
- Los vectores son ortogonales (el producto interno es 0)
2. Problema de correlación lineal
También se puede entender como un problema linealmente independiente.
-
Definición: Discusión de solución cero y solución distinta de cero (menos usada, fácil de entender)
-
rango:
Rango completo === "linealmente independiente
Insatisfecho con el rango === "correlación lineal
-
Determinante:
A partir del rango se puede proponer que:
- |A|=0, correlación lineal
- |A|!=0, linealmente independiente
Conclusiones importantes:
-
n+1 vectores n-dimensionales deben estar linealmente relacionados
-
La correlación lineal es originalmente el concepto de la relación entre dos o más vectores, pero si solo hay un vector, se debe mencionar el concepto de independencia lineal, entonces hay una correlación lineal de vector 0 y una correlación lineal de vector distinta de cero. (generalmente no digas eso)
-
Cuando se agrega un nuevo vector a un grupo de vectores, la posibilidad de su correlación se vuelve mayor; cuando se agrega un nuevo elemento a un grupo de vectores, la posibilidad de su irrelevancia se vuelve mayor.
-
Los conjuntos de vectores equivalentes tienen el mismo rango, pero los conjuntos de vectores con el mismo rango no son necesariamente equivalentes
Una relación: Dos vectores son ortogonales y deben ser linealmente independientes, pero linealmente independientes pueden no ser ortogonales.
3. Problema de representación lineal
Se puede entender que los siguientes problemas de solución de grupos de vectores lineales
- Representación única: r(A)=r(A|b)=n
- Múltiples representaciones: r(A)=r(A|b)<n
- No se puede representar: r(A)<r(A|b)
4. Grupos máximos linealmente independientes
El vector donde se encuentra el pivote de rango constituye un grupo máximo linealmente independiente
4. Ecuaciones lineales
1. Ecuaciones lineales homogéneas
Primero, entienda el concepto:
Forma general y forma vectorial de ecuaciones
La solución del sistema de ecuaciones (qué importa si hay solución o no)
Sistema de solución básica y solución general.
El sistema de solución básica es un representante, y la solución general contiene todos los sistemas de solución básica.
Número de vectores de solución básica
El número de vectores del sistema de solución básico + r(A) = n (el número de cantidades desconocidas)
Aquí n es el número de x en forma general, y generalmente el número de columnas en forma vectorial
2. Ecuaciones lineales no homogéneas
Condiciones para una solución:
- tiene una solución única
- tiene infinitas soluciones
- Sin solución
Correspondiente al problema de representación lineal de la tercera parte
Propiedades de la solución:
- La solución homogénea + la solución no homogénea sigue siendo una solución no homogénea
- La estructura de solución general no homogénea es la solución general homogénea correspondiente + una solución especial de la ecuación no homogénea
- Al buscar una solución especial, seleccione todas las variables libres para que sean 0, y se puede obtener una solución especial correspondiente
El problema central aquí son estos dos puntos de conocimiento correspondientes, uno es la condición de existencia de la solución y el otro es encontrar la solución general.
5. Valor propio, vector propio, matriz de similitud
1. Valores propios y vectores propios
- Matriz de orden n, es decir, (matriz cuadrada) tiene valores propios
- Los vectores propios no son 0
paso:
-
1. Encuentra los valores propios
El método rápido es una combinación de filas y columnas, si solo cambias filas, sentirás que el cálculo es muy complicado.
-
2. Encuentra el vector propio correspondiente según el valor propio
Siempre se me olvida que resuelve los vectores propios según las ecuaciones homogéneas correspondientes a los valores propios
2. Matriz de similitud
Propiedades de las matrices de similitud:
- 1. Personalidad: A~A
- 2. Simetría:
A~B ====> B~A- 3. Transitividad
3. Matriz ortogonal
-
Definición: A*A T =A T *A=E
-
A es una matriz ortogonal cuyo determinante tiene un valor de 1 o -1.
-
A es una matriz ortogonal, y su matriz inversa y la matriz que la acompaña también son matrices ortogonales
-
Si A y B son ambas matrices ortogonales, entonces AB y BA también son matrices ortogonales
4. Matriz simétrica real
- son numeros reales
- Matriz simétrica
En comparación con las matrices cuadradas ordinarias, los valores propios de las ecuaciones ordinarias pueden ser números complejos, mientras que los valores propios de las matrices simétricas reales deben ser números reales.
| punto de comparación | cuadrado ordinario | matriz simétrica real |
|---|---|---|
| Valores propios | plural posible | cierto número real |
| Vectores propios correspondientes a diferentes valores propios | lineal independiente | Linealmente independientes + mutuamente ortogonales |
| diagonalización similar | incierto | debe |
| Diagonalización similar ortogonal | no puedo | capaz |
Diagonalización similar ortogonal: las matrices de diagonalización similares son matrices ortogonales
Seis Tipo secundario
1. Estandarización de la forma cuadrática (método de combinación)
- 1. Sea x1=y1+y2, x2=y1-y2, x3=y3, simplifique (omita si contiene un término cuadrado)
- 2. Con x1
- 3. Con x2
- 4. Con x3
- 5. Describe la transformación lineal reversible y la forma canónica cuadrática final
2. Estandarización de la forma cuadrática (método de transformación ortogonal)
- 1. Escribe la forma matricial de la forma cuadrática
- 2. Encuentra los valores propios de la matriz
- 3. Encuentra el vector propio correspondiente al valor propio
- 4. Ortogonalización y unificación
- 5. Escribe el cambio lineal reversible final
3. Teorema de la inercia y contrato matricial
La transformación lineal reversible no cambia los exponentes de inercia positivos y negativos de la forma cuadrática
Una transformación lineal reversible para obtener B, luego contrato AB
2021 notas de prueba reales
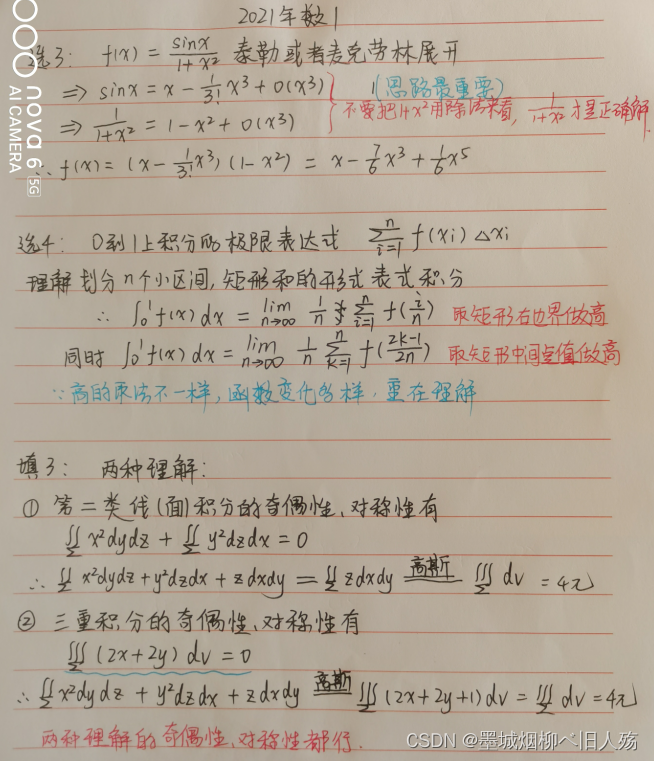
- Opción 3: Expansión de Taylor
- Opción 4: Expresión límite de integral sobre 0 a 1
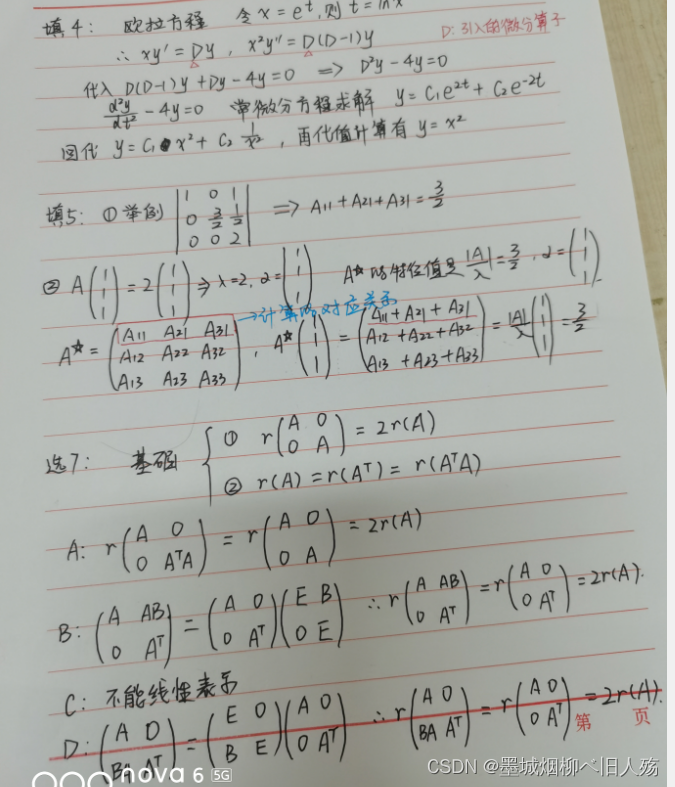
- Opción 7: comprensión del rango de la matriz de bloques
- Rellena 3: la paridad y simetría de la integral
- Complete 4: la ecuación de Euler (impopular)
- Complete 5: Problema de cálculo de determinante abstracto