Detección de código QR en tiempo real + posicionamiento basado en opencv4.0 pyzbar y python
1. Escribe al frente
finalmente se lanzó opencv4.0, y los proyectos que deberían visualizarse en el futuro están todos basados en la versión opencv4.0, por lo que ahora también se actualizó a la versión 4.0, la diferencia específica de la versión 3.0 es muy pequeña, puede verificar aquí para más detalles .
2. Preparación preliminar
opencv 4.0(3.0)
pitón 3.8
pizbar
3. Demostración de efectos
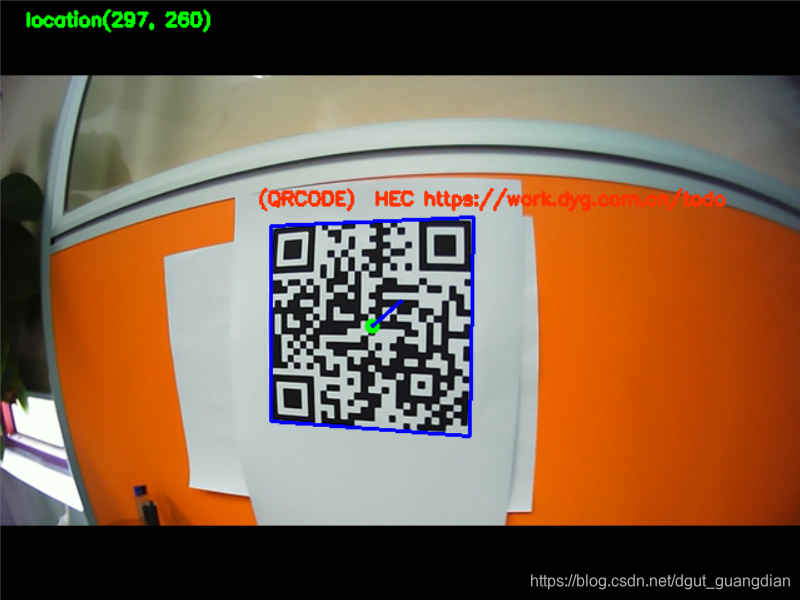


Si el código QR tiene caracteres chinos utf-8, no se puede mostrar en la imagen usando opencv. Los zapatos para niños que lo necesiten pueden usar matplotlib para mostrar la imagen.
4. Lograr metas
La cámara se utiliza para completar el reconocimiento, la detección y el posicionamiento en tiempo real del código bidimensional y obtener el punto central y el rectángulo circunscrito más pequeño del código bidimensional.
5. Código
import cv2
from pyzbar import pyzbar
#二维码动态识别
camera=cv2.VideoCapture(0)
camera.set(3,1280) #设置分辨率
camera.set(4,768)
while True:
(grabbed,frame)=camera.read()
#获取画面中心点
h1,w1= frame.shape[0],frame.shape[1]
# 纠正畸变(这里把相机标定的代码去除了,各位自行标定吧)
dst = frame
# 扫描二维码
text = pyzbar.decode(dst)
for texts in text:
textdate = texts.data.decode('utf-8')
print(textdate)
(x, y, w, h) = texts.rect#获取二维码的外接矩形顶点坐标
print('识别内容:'+textdate)
# 二维码中心坐标
cx = int(x + w / 2)
cy = int(y + h / 2)
cv2.circle(dst, (cx, cy), 2, (0, 255, 0), 8) # 做出中心坐标
print('中间点坐标:',cx,cy)
coordinate=(cx,cy)
#在画面左上角写出二维码中心位置
cv2.putText(dst,'QRcode_location'+str(coordinate),(20,20), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 0), 2)
#画出画面中心与二维码中心的连接线
cv2.line(dst, (cx,cy),(int(w1/2),int(h1/2)), (255, 0, 0), 2)
#cv2.rectangle(dst, (x, y), (x + w, y + h), (0, 255, 255), 2) # 做出外接矩形
#二维码最小矩形
cv2.line(dst, texts.polygon[0], texts.polygon[1], (255, 0, 0), 2)
cv2.line(dst, texts.polygon[1], texts.polygon[2], (255, 0, 0), 2)
cv2.line(dst, texts.polygon[2], texts.polygon[3], (255, 0, 0), 2)
cv2.line(dst, texts.polygon[3], texts.polygon[0], (255, 0, 0), 2)
#写出扫描内容
txt = '(' + texts.type + ') ' + textdate
cv2.putText(dst, txt, (x - 10, y - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 50, 255), 2)
cv2.imshow('dst',dst)
if cv2.waitKey(1) & 0xFF == ord('q'): # 按q保存一张图片
cv2.imwrite("./frame.jpg", frame)
break
camera.release()
cv2.destroyAllWindows()Simplemente ejecute el código directamente, adecuado para las versiones opencv3.x y 4.x
6. Epílogo
Este proyecto se utiliza para realizar el posicionamiento de un robot utilizando etiquetas de código QR y visión, y ahora se han realizado las funciones simples iniciales.
Mi blog: https://blog.dgut.top/