Каталог статей
представлять
Октодерево — это структура данных, используемая для разделения пространства в трехмерном видении. Каждый куб можно постепенно разделить на 8 подкубов, пока не будет достигнут заданный минимальный размер объема (вокселя). И этот минимальный объем (воксель) определяет разрешение октодерева.
Роль октомапа:
- Создайте карту с небольшим размером и компактным содержимым из облака точек, экономя место
- Объедините перекрывающиеся детали объединенного облака точек, чтобы повысить эффективность вычислений.
- Удобно для планирования пути, навигации, обнаружения столкновений
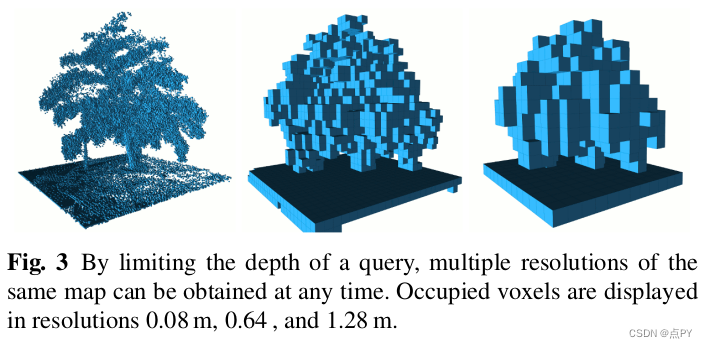
Как правило, когда сцена относительно большая, используется более низкое разрешение, что означает меньшее количество блоков большего размера. Если сцена небольшая, используйте высокое разрешение для повышения точности.
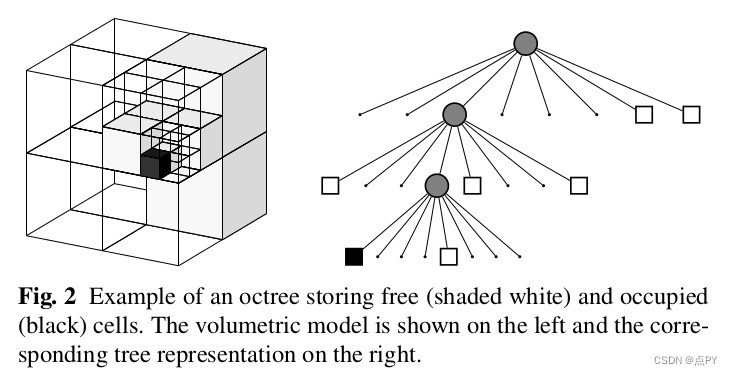
Выше приведен пример хранения октодерева, модель тома слева, а структура представления дерева справа.
Подготовка окружающей среды