1. Resumen del proyecto
Hace años, el gerente de producto se acercó a mí y me pidió que probara el proyecto visual de desapilamiento de ladrillos refractarios en 3D. Probablemente este turno
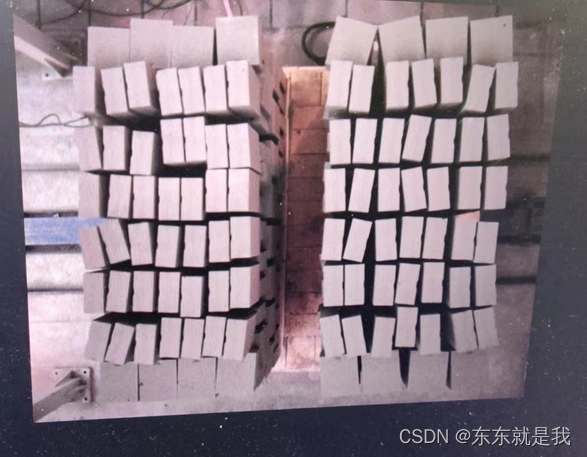
2. Situación real
Fue a la escena, recolectó imágenes, calibró la cámara y el robot. Se encuentra que el cliente no quiere las coordenadas del centro del vértice, sino las coordenadas del centro del lado. Porque se agarran por el costado. Entonces solo puedo olvidarlo y calibrar el punto central de la superficie superior y el punto de agarre en el costado.
3. Preguntas
En primer lugar, en realidad hay dos ventosas del robot, y los puntos tcp son todos bridas. Este problema nos ha preocupado durante mucho tiempo. Porque los datos que nos da nuestra cámara son xyz y ángulo de deflexión. Pero si el robot usa la brida como punto tcp, xy también cambiará durante la rotación.
4. Resuelve
Utilizando el abc de la brida en el primer punto y el ángulo de desviación xyz del segundo ladrillo, primero convierta xyzabc en x1y1z1a1b1c1 en el punto tcp de la ventosa. Luego haga el ángulo de desviación del eje z en este punto. Luego convierta el x1y1z1a1b1c1 rotado al punto tcp y luego el xyzabc de la brida
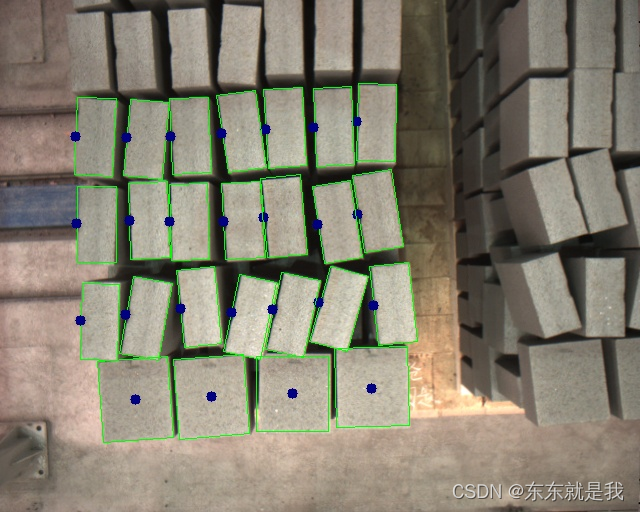
5. Representaciones reales
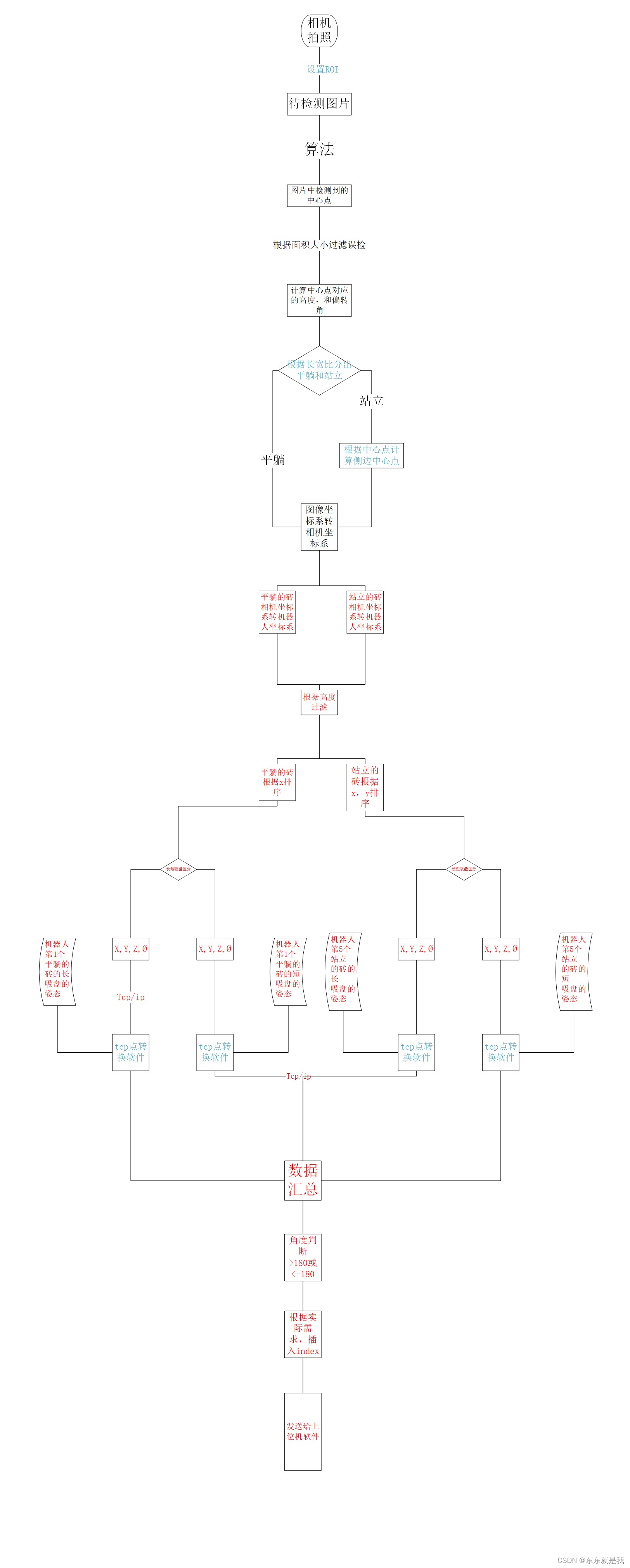
6. Diagrama de flujo
6. Consideraciones de seguridad
La prueba se completa y el tiempo de detección es de 2 segundos, lo que básicamente satisface las necesidades de los clientes. Pero el problema común del aprendizaje profundo es ininterpretable. Como resultado, tanto las ventas como los clientes tienen grandes dudas sobre la detección falsa. Además, los clientes son muy inaceptables a los problemas de seguridad personal o seguridad de la propiedad causados por la detección falsa. Después de eso, solo podemos dejarlo ir.
Pero lo que quiero decir es si se trata de un algoritmo de visión tradicional, como la coincidencia de plantillas 3D de Cognex al lado. O nuestro aprendizaje profundo provocará una detección falsa y una detección perdida. Nadie dirá que resuelve al 100% este problema. Entonces, ¿qué podemos hacer para reducir las detecciones falsas o reducir las pérdidas?
6.1 Robótica
1. En primer lugar, el robot necesita una barrera de luz de seguridad y una fotoeléctrica de seguridad, y solo se puede producir cuando no hay nadie alrededor.
2. El robot necesita una planificación de movimiento completa para garantizar que no se produzca ninguna colisión en las coordenadas correctas proporcionadas por la cámara.
3. El robot debe tener un sensor de presión.Después de golpear un objeto, se detendrá cuando sienta una fuerza de reacción.
4. El robot establece un rango de movimiento para sí mismo.
6.2 Aspectos algorítmicos
1. Mejore la precisión de la detección e intente que el modelo se ajuste demasiado. Esto tendrá una alta probabilidad de evitar detecciones falsas, pero esta situación provocará detecciones perdidas.
2. Configure el área de detección.
3. Según el tamaño, la relación de aspecto y la altura del objeto detectado. Realizar filtrado. Prevenir la detección falsa
7. Resumen
De hecho, la inexplicabilidad del aprendizaje profundo siempre ha sido inaceptable para todos, e inexplicabilidad significa inestabilidad. Pero quiero decir que independientemente de cualquier algoritmo visual, es inestable. Solo podemos agregar nuestra experiencia humana a esto. Como relación de aspecto, tamaño, color, etc.
Siempre que agreguemos suficiente experiencia, se puede usar cualquier algoritmo.