Referencia: "Práctica de desarrollo de robots ROS"
Nota: Continúe implementando la programación de comunicación en el paquete de funciones learning_communication en el espacio de trabajo catkin_ws creado en la sección anterior
1. Modelo de comunicación temática

Segundo, la realización de la programación de temas básicos.
1. Proceso de programación del tema:
1. Crear un editor (hablador);
2. Crear un suscriptor (escucha);
3. Agregar opciones de compilación;
4. Ejecutar un archivo ejecutable;
2. Implementar el editor (Hablador)
a. Cree el archivo talker.cpp en el siguiente directorio:

b. El código del archivo talker.cpp es el siguiente:
/*
该例程将发布chatter话题,消息类型String
*/
#include <sstream>
#include "ros/ros.h"
#include "std_msgs/String.h"
int main(int argc,char **argv)
{
//ROS节点初始化
ros::init(argc,argv,"talker");
//创建节点句柄
ros::NodeHandle n;
//创建一个Publisher,发布名为chatter的topic,消息类型为std::msgs::String
ros::Publisher chatter_pub = n.advertise<std_msgs::String>("chatter", 1000);
//设置循环的频率
ros::Rate loop_rate(10);
int count = 0;
while (ros::ok())
{
//初始化std::msgs::String类型的消息
std_msgs::String msg;
std::stringstream ss;
ss << "hello world " << count;
msg.data = ss.str();
//发布消息
ROS_INFO("%s", msg.data.c_str());
chatter_pub.publish(msg);
//循环等待回调函数
ros::spinOnce();
//按照循环频率延时
loop_rate.sleep();
++count;
}
return 0;
}
c. Lógica de implementación
(1) Inicialice el nodo ROS;
(2) Registre la información del nodo con el ROS Master, incluido el nombre del tema publicado y el tipo de mensaje en el tema;
(3) Haga circular el mensaje de acuerdo con una frecuencia determinada;
3. Implemente el suscriptor (oyente)
a. Cree el archivo listener.cpp en el siguiente directorio:
b. El código del archivo listener.cpp es el siguiente:
/*
该例程将订阅chatter话题,消息类型String
*/
#include "ros/ros.h"
#include "std_msgs/String.h"
//接收到订阅的消息后,会进入消息回调函数
void chatterCallback(const std_msgs::String::ConstPtr& msg)
{
//将接收到的消息打印出来
ROS_INFO("I heard: [%s]", msg->data.c_str());
}
int main(int argc, char **argv)
{
//初始化ROS节点
ros::init(argc, argv, "listener");
//创建节点句柄
ros::NodeHandle n;
//创建一个Subscriber,订阅名为chatter的topic,注册回调函数chatterCallback
ros::Subscriber sub = n.subscribe("chatter", 1000, chatterCallback);
//循环等待回调函数
ros::spin();
return 0;
}
c. Lógica de implementación
(1) Inicialice el nodo ROS;
(2) Suscríbase al tema requerido;
(3) Espere el mensaje del tema en un bucle e ingrese la función de devolución de llamada después de recibir el mensaje;
(4) Complete el procesamiento del mensaje en la función de devolución de llamada;
4. Agregar opciones de compilación
Método de compilación
Compile el código en el archivo CMakeLists.txt:
(1) Establecer el código que se compilará y el archivo ejecutable generado;
(2) Establecer la biblioteca de enlaces;
(3) Establecer la dependencia;
Operación específica
Abra el archivo CMakeLists.txt en el paquete de funciones learning_communication y agregue el siguiente código:
add_executable(talker src/talker.cpp)
target_link_libraries(talker ${catkin_LIBRARIES})
add_executable(listener src/listener.cpp)
target_link_libraries(listener ${catkin_LIBRARIES})
Generar
Genere un archivo ejecutable en el espacio de trabajo catkin_ws:
catkin_make
5. Ejecute el archivo ejecutable
Tenga en cuenta que cada vez que abra una nueva terminal para agregar variables de entorno: (si necesita agregar manualmente)
source ~/test/catkin_ws/devel/setup.bash
a. Abra
la terminal de ROS Master :
roscore
b. Inicie el hablador y
abra una nueva terminal:
rosrun learning_communication talker

c. Inicie el oyente y
abra la terminal:
rosrun learning_communication listener

Ambas partes transmiten y reciben datos en tiempo real
Tres, programación de temas personalizados
Podemos usar la estructura de mensajes definida por ROS, o podemos definir el mensaje del tema nosotros mismos, es decir, la programación personalizada del tema
1. Defina el archivo msg
Crear un directorio bajo learning_communication msg, Person.msg crear archivos en el directorio msg
escribe:
string name
uint8 sex
uint8 age
uint8 unknown = 0
uint8 male = 1
uint8 female = 2
2. Agregue la dependencia del paquete de funciones en package.xml
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
3. Agregue opciones de compilación en CMakeLists.txt
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
message_generation
)
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES learning_communication
CATKIN_DEPENDS roscpp rospy std_msgs message_runtime
# DEPENDS system_lib
)
add_message_files(FILES Person.msg)
generate_messages(DEPENDENCIES std_msgs)
4. Compilar
Genere un archivo ejecutable en el espacio de trabajo catkin_ws:
catkin_make
5. Ver mensajes personalizados
rosmsg show Person
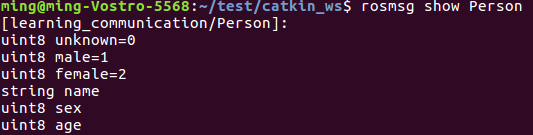
Si la personalización es exitosa, puede usarla incluyendo el archivo de encabezado.
