Referencia: "Práctica de desarrollo de robots ROS"
Nota: continúe implementando la programación de comunicación en el paquete de funciones learning_communication en el espacio de trabajo catkin_ws
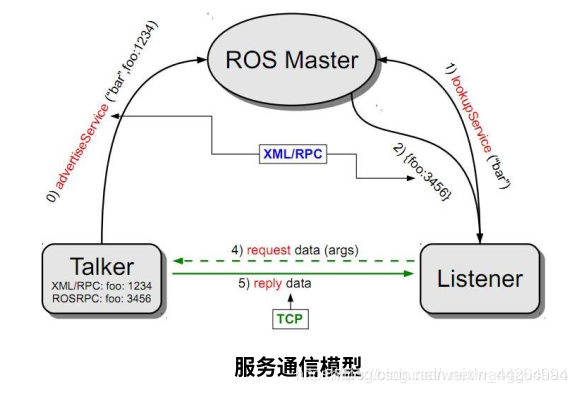
1. Modelo de comunicación de servicio
Segundo, implementación de programación de servicios
Nota: El oyente adicional agrega dos números al hablador, y el hablador lo agrega al oyente
1. Proceso de programación del servicio:
1. Cree un servidor;
2. Cree un cliente;
3. Agregue opciones de compilación;
4. Ejecute un archivo ejecutable;
2. Archivo de servicio personalizado srv
a. Cree el directorio srv en learning_communication y el archivo AddTwoInts.srv en el directorio srv
int64 a
int64 b
---
int64 sum
b. Agregar dependencia de paquete de funciones en package.xml
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
c. Agregar opciones de compilación en CMakeLists.txt
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
message_generation
)
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES learning_communication
CATKIN_DEPENDS roscpp rospy std_msgs message_runtime
# DEPENDS system_lib
)
add_service_files(FILES AddTwoInts.srv)
generate_messages(DEPENDENCIES std_msgs)
d. Compilación
Genere un archivo ejecutable en el espacio de trabajo catkin_ws:
catkin_make
3. Crear un servidor
a. Cree el archivo server.cpp en el siguiente directorio:

b. El código del archivo server.cpp es el siguiente:
/*
AddTwoInts Server
*/
#include "ros/ros.h"
#include "learning_communication/AddTwoInts.h"
//service回调函数,输入参数req,输出参数res
bool add(learning_communication::AddTwoInts::Request &req,
learning_communication::AddTwoInts::Response &res)
{
//将输入参数中的请求数据相加,结果放到应答变量中
res.sum = req.a + req.b;
ROS_INFO("request: x=%ld, y=%ld", (long int)req.a, (long int)req.b);
ROS_INFO("sending back response: [%ld]", (long int)res.sum);
return true;
}
int main(int argc, char **argv)
{
//ROS节点初始化
ros::init(argc, argv, "add_two_ints_server");
//创建节点句柄
ros::NodeHandle n;
//创建一个名为add_two_ints的server,注册回调函数add()
ros::ServiceServer service = n.advertiseService("add_two_ints", add);
//循环等待回调函数
ROS_INFO("Ready to add two ints.");
ros::spin();
return 0;
}
c. Lógica de implementación
(1) Inicialice el nodo ROS;
(2) Cree una instancia de servidor;
(3) Espere la solicitud de servicio de forma circular e ingrese la función de devolución de llamada;
(4) Complete el procesamiento de la función de servicio en la función de devolución de llamada y retroalimente los datos de respuesta;
4. Crear un cliente
a. Cree el archivo client.cpp en el siguiente directorio:
b. El código del archivo client.cpp es el siguiente:
/*
AddTwoInts Client
*/
#include <cstdlib>
#include "ros/ros.h"
#include "learning_communication/AddTwoInts.h"
int main(int argc, char **argv)
{
//Ros节点初始化
ros::init(argc, argv, "add_two_ints_client");
//从终端命令行获取两个加数
if (argc != 3)
{
ROS_INFO("usage: add_two_ints_client X Y");
return 1;
}
//创建节点句柄
ros::NodeHandle n;
//创建一个client,请求add_two_int service,service消息类型是learning_communication::AddTwoInts
ros::ServiceClient client = n.serviceClient<learning_communication::AddTwoInts>("add_two_ints");
//创建learning_communication::AddTwoInts类型的service消息
learning_communication::AddTwoInts srv;
srv.request.a = atoll(argv[1]);
srv.request.b = atoll(argv[2]);
//发布service请求,等待加法运算的应答结果
if (client.call(srv))
{
ROS_INFO("Sum: %ld", (long int)srv.response.sum);
}
else
{
ROS_ERROR("Failed to call service add_two_ints");
return 1;
}
return 0;
}
c. Lógica de implementación
(1) Inicializar nodo ROS;
(2) Crear instancia de Cliente;
(3) Publicar datos de solicitud de servicio;
(4) Esperar el resultado de la respuesta después del procesamiento del Servidor;
5. Agregar opciones de compilación
Método de compilación
Compile el código en el archivo CMakeLists.txt:
(1) Establecer el código que se compilará y el archivo ejecutable generado;
(2) Establecer la biblioteca de enlaces;
(3) Establecer la dependencia;
Operación específica
Abra el archivo CMakeLists.txt en el paquete de funciones learning_communication y agregue el siguiente código:
add_executable(server src/server.cpp)
target_link_libraries(server ${catkin_LIBRARIES})
add_dependencies(server ${PROJRCT_NAME}_gencpp)
add_executable(client src/client.cpp)
target_link_libraries(client ${catkin_LIBRARIES})
add_dependencies(client ${PROJRCT_NAME}_gencpp)
Generar
Genere un archivo ejecutable en el espacio de trabajo catkin_ws:
catkin_make
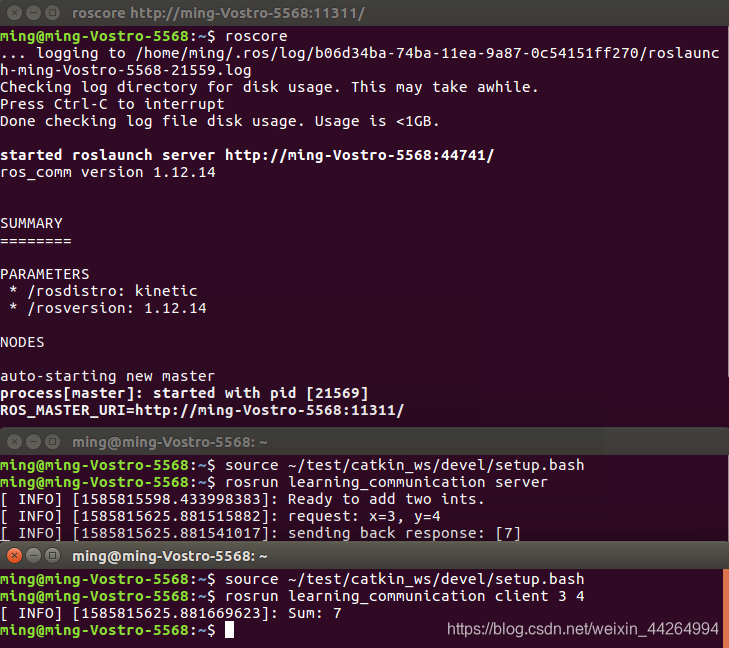
6. Ejecute el archivo ejecutable
Tenga en cuenta que cada vez que abra una nueva terminal para agregar variables de entorno: (si necesita agregar manualmente)
source ~/test/catkin_ws/devel/setup.bash
a. Abra
la terminal de ROS Master :
roscore
b. Inicie el servidor y
abra una nueva terminal:
rosrun learning_communication server
c. Inicie el cliente y
abra la terminal:
rosrun learning_communication client 3 4