Primero introduzca el ejemplo de registro geométrico y calibración:
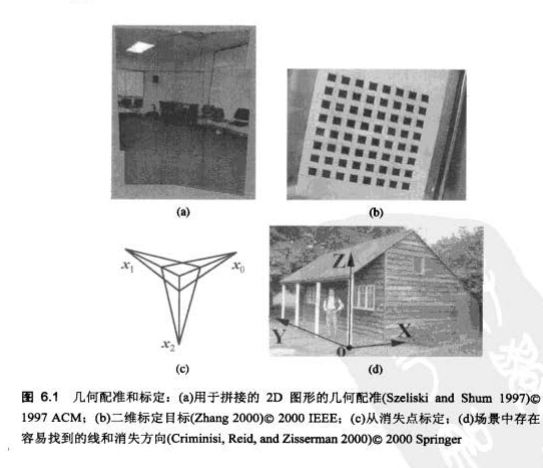
El registro basado en funciones es el
problema de estimar el movimiento de un conjunto de dos o más puntos 2D o 3D coincidentes .
1. Use el registro de mínimos cuadrados 20
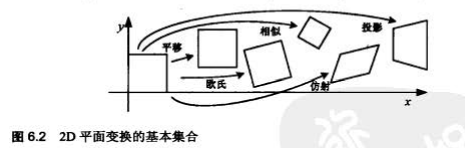
Dado un conjunto de puntos de características coincidentes \ ({X_i, x_ {i} ^ {'}}} y transformación de parámetros planos de la siguiente forma:
Para estimar mejor los parámetros de movimiento, el método comúnmente utilizado es mínimos cuadrados, que es minimizar la suma de los residuos cuadrados.
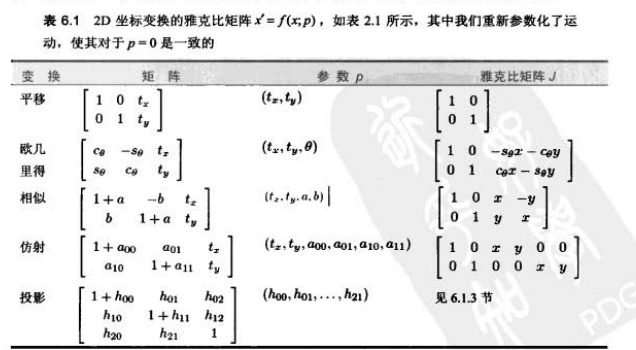
La matriz correspondiente y la matriz jacobiana para diferentes transformaciones se resumen de la siguiente manera:
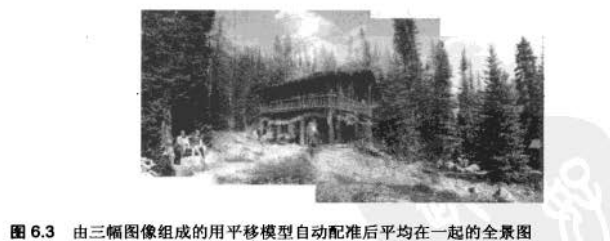
2. Aplicación: Panorama
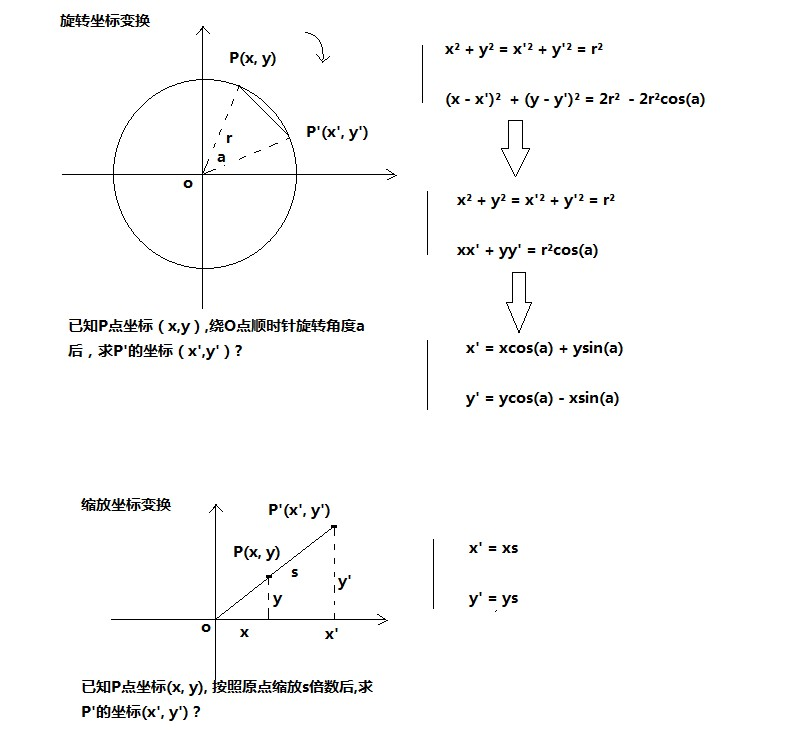
Una de las aplicaciones más simples de registro de imágenes es una forma especial de unión de imágenes, llamada "panorama". En el panorama, antes de que se use el promedio simple para la fusión, la imagen se traducirá y puede haber rotación y escalado.
Por ejemplo, la siguiente figura:
Fórmula de transformación de rotación y escala:
Tres algoritmo iterativo
Los mínimos cuadrados lineales son el método de estimación de parámetros más simple, sin embargo, la mayoría de los problemas en la visión por computadora
no tienen una relación lineal simple entre el valor medido y el valor desconocido. El problema obtenido en este caso se llama "mínimos cuadrados no lineales" o "regresión no lineal".
4. Robustos mínimos cuadrados y RANSAC
Los mínimos cuadrados convencionales son una opción adecuada para mediciones en las que el ruido se ajusta a una distribución normal (gaussiana). Sin embargo, cuando hay valores atípicos en los puntos correspondientes, se necesita un mínimo de cuadrados más robustos. En este caso, Green usa *** M-estimación ** (aplica una función de penalización robusta \ (p (r) \) a los residuos en lugar de sus cuadrados.)
La estimación M a menudo puede reducir el impacto de los valores atípicos, pero en algunos casos, comenzar con demasiados
valores atípicos evitará que IRLS (u otros algoritmos de descenso de gradiente) converjan al óptimo global. Una mejor manera es encontrar un conjunto de puntos interiores que no se correspondan, es decir, puntos que sean consistentes con la estimación del movimiento activo. Hay dos métodos principales (ambos seleccionan aleatoriamente un subconjunto de k puntos correspondientes, luego calculan el \ (p \) estimado y luego calculan el residuo del conjunto de puntos correspondiente);
- Muestra aleatoria de consenso
- Varianza mediana mínima
Cinco, registro en 3D
A diferencia del registro de características de imágenes 2D, muchas aplicaciones de visión por computadora requieren el registro de puntos 3D. En el caso de que la transformación 3D sea lineal a los parámetros de movimiento, por ejemplo, traducción, similitud y transformación afín, se pueden usar mínimos cuadrados convencionales.
Para el caso de los deportes europeos, llamado el problema de "dirección absoluta", se requieren los dos métodos siguientes:
- Algoritmo de Procrustes ortogonal : Al calcular la descomposición de descomposición de valor singular (SVD) de la matriz de correlación 3 × 3, se obtiene la matriz de rotación.
- Algoritmo de dirección absoluta : estimar la unidad de cuaternión correspondiente a la matriz de rotación \ (R \) y encontrar el vector propio con el mayor valor propio positivo.
Los experimentos han comparado los otros dos métodos para demostrar que la diferencia de precisión entre los dos métodos es insignificante.