convolución Day03- red neuronal teoría y la utilización
Directorio artículo
Descripción del empleo
el proyecto de hoy se basa en convolución real de redes neuronales LeNet de "reconocimiento de matrículas."
Requisitos de trabajo:
- 1, de acuerdo con los contenidos aprendidos en clase, y correr a través del modelo construido LeNet. Sobre esta base, intente otra configuración de la red.
- 2, el pensamiento y la práctica parámetro de ajuste, optimización, mejorar la precisión de la prueba.
Cursos y conjunto de datos del enlace está disponible para prefacio buscando introducción antes de que el aprendizaje formal
Todo lo que necesitamos son los datos contenidos en la carpeta Día 03. characterData.zip es un conjunto de datos que hay que usar, CarID.png se utiliza para probar el efecto de la imagen final.
Ejemplo de código
- paquetes de importación necesarios
import numpy as np
import paddle as paddle
import paddle.fluid as fluid
from PIL import Image
import cv2
import matplotlib.pyplot as plt
import os
from multiprocessing import cpu_count
from paddle.fluid.dygraph import Pool2D,Conv2D
# from paddle.fluid.dygraph import FCfrom paddle.fluid.dygraph import Linear
- Generar una lista de imágenes de caracteres de la matrícula
data_path = '/home/aistudio/data'
character_folders = os.listdir(data_path)
label = 0
LABEL_temp = {}
if(os.path.exists('./train_data.list')):
os.remove('./train_data.list')
if(os.path.exists('./test_data.list')):
os.remove('./test_data.list')
for character_folder in character_folders:
with open('./train_data.list', 'a') as f_train:
with open('./test_data.list', 'a') as f_test:
if character_folder == '.DS_Store' or character_folder == '.ipynb_checkpoints' or character_folder == 'data23617':
continue
print(character_folder + " " + str(label))
LABEL_temp[str(label)] = character_folder #存储一下标签的对应关系
character_imgs = os.listdir(os.path.join(data_path, character_folder))
for i in range(len(character_imgs)):
if i%10 == 0:
f_test.write(os.path.join(os.path.join(data_path, character_folder), character_imgs[i]) + "\t" + str(label) + '\n')
else:
f_train.write(os.path.join(os.path.join(data_path, character_folder), character_imgs[i]) + "\t" + str(label) + '\n')
label = label + 1
print('图像列表已生成')
- Pasar el lector generada por pasos lista de imágenes define el conjunto de entrenamiento carácter matrícula del vehículo y equipo de prueba
def data_mapper(sample):
img, label = sample
img = paddle.dataset.image.load_image(file=img, is_color=False)
img = img.flatten().astype('float32') / 255.0
return img, label
def data_reader(data_list_path):
def reader():
with open(data_list_path, 'r') as f:
lines = f.readlines()
for line in lines:
img, label = line.split('\t')
yield img, int(label)
return paddle.reader.xmap_readers(data_mapper, reader, cpu_count(), 1024)
- La creación de un proveedor de datos
# 用于训练的数据提供器
train_reader = paddle.batch(reader=paddle.reader.shuffle(reader=data_reader('./train_data.list'), buf_size=512), batch_size=128)
# 用于测试的数据提供器
test_reader = paddle.batch(reader=data_reader('./test_data.list'), batch_size=128)
- Definir la red (código de finalización)
class MyLeNet(fluid.dygraph.Layer):
def __init__(self):
super(MyLeNet,self).__init__()
self.hidden1_1 = Conv2D()
self.hidden1_2 = Pool2D()
self.hidden2_1 = Conv2D()
self.hidden2_2 = Pool2D()
self.hidden3 = Conv2D()
self.hidden4 = Linear()
def forward(self,input):
return y
- El entrenamiento con un mapa dinámico
with fluid.dygraph.guard():
model=MyLeNet() #模型实例化
model.train() #训练模式
opt=fluid.optimizer.SGDOptimizer(learning_rate=0.001, parameter_list=model.parameters())#优化器选用SGD随机梯度下降,学习率为0.001.
epochs_num=200 #迭代次数为200
for pass_num in range(epochs_num):
for batch_id,data in enumerate(train_reader()):
images=np.array([x[0].reshape(1,20,20) for x in data],np.float32)
labels = np.array([x[1] for x in data]).astype('int64')
labels = labels[:, np.newaxis]
image=fluid.dygraph.to_variable(images)
label=fluid.dygraph.to_variable(labels)
predict=model(image)#预测
loss=fluid.layers.cross_entropy(predict,label)
avg_loss=fluid.layers.mean(loss)#获取loss值
acc=fluid.layers.accuracy(predict,label)#计算精度
if batch_id!=0 and batch_id%50==0:
print("train_pass:{},batch_id:{},train_loss:{},train_acc:{}".format(pass_num,batch_id,avg_loss.numpy(),acc.numpy()))
avg_loss.backward()
opt.minimize(avg_loss)
model.clear_gradients()
fluid.save_dygraph(model.state_dict(),'MyLeNet')#保存模型
- La validación del modelo
with fluid.dygraph.guard():
accs = []
model=MyLeNet()#模型实例化
model_dict,_=fluid.load_dygraph('MyLeNet')
model.load_dict(model_dict)#加载模型参数
model.eval()#评估模式
for batch_id,data in enumerate(test_reader()):#测试集
images=np.array([x[0].reshape(1,20,20) for x in data],np.float32)
labels = np.array([x[1] for x in data]).astype('int64')
labels = labels[:, np.newaxis]
image=fluid.dygraph.to_variable(images)
label=fluid.dygraph.to_variable(labels)
predict=model(image)#预测
acc=fluid.layers.accuracy(predict,label)
accs.append(acc.numpy()[0])
avg_acc = np.mean(accs)
print(avg_acc)
- imágenes de matrículas se procesan, dividida la placa de matrícula de cada personaje y ahorrar
license_plate = cv2.imread('CarID.png')
gray_plate = cv2.cvtColor(license_plate, cv2.COLOR_RGB2GRAY)
ret, binary_plate = cv2.threshold(gray_plate, 175, 255, cv2.THRESH_BINARY)
result = []
for col in range(binary_plate.shape[1]):
result.append(0)
for row in range(binary_plate.shape[0]):
result[col] = result[col] + binary_plate[row][col]/255
character_dict = {}
num = 0
i = 0while i < len(result):
if result[i] == 0:
i += 1
else:
index = i + 1
while result[index] != 0:
index += 1
character_dict[num] = [i, index-1]
num += 1
i = index
for i in range(8):
if i==2:
continue
padding = (170 - (character_dict[i][1] - character_dict[i][0])) / 2
ndarray = np.pad(binary_plate[:,character_dict[i][0]:character_dict[i][1]], ((0,0), (int(padding), int(padding))), 'constant', constant_values=(0,0))
ndarray = cv2.resize(ndarray, (20,20))
cv2.imwrite('./' + str(i) + '.png', ndarray)
def load_image(path):
img = paddle.dataset.image.load_image(file=path, is_color=False)
img = img.astype('float32')
img = img[np.newaxis, ] / 255.0
return img
- La conversión etiqueta
print('Label:',LABEL_temp)
match = {'A':'A','B':'B','C':'C','D':'D','E':'E','F':'F','G':'G','H':'H','I':'I','J':'J','K':'K','L':'L','M':'M','N':'N',
'O':'O','P':'P','Q':'Q','R':'R','S':'S','T':'T','U':'U','V':'V','W':'W','X':'X','Y':'Y','Z':'Z',
'yun':'云','cuan':'川','hei':'黑','zhe':'浙','ning':'宁','jin':'津','gan':'赣','hu':'沪','liao':'辽','jl':'吉','qing':'青','zang':'藏',
'e1':'鄂','meng':'蒙','gan1':'甘','qiong':'琼','shan':'陕','min':'闽','su':'苏','xin':'新','wan':'皖','jing':'京','xiang':'湘','gui':'贵',
'yu1':'渝','yu':'豫','ji':'冀','yue':'粤','gui1':'桂','sx':'晋','lu':'鲁',
'0':'0','1':'1','2':'2','3':'3','4':'4','5':'5','6':'6','7':'7','8':'8','9':'9'}
L = 0
LABEL ={}
for V in LABEL_temp.values():
LABEL[str(L)] = match[V]
L += 1
print(LABEL)
- Construcción predijo proceso dinámico de la figura.
with fluid.dygraph.guard():
model=MyLeNet()#模型实例化
model_dict,_=fluid.load_dygraph('MyLeNet')
model.load_dict(model_dict)#加载模型参数
model.eval()#评估模式
lab=[]
for i in range(8):
if i==2:
continue
infer_imgs = []
infer_imgs.append(load_image('./' + str(i) + '.png'))
infer_imgs = np.array(infer_imgs)
infer_imgs = fluid.dygraph.to_variable(infer_imgs)
result=model(infer_imgs)
lab.append(np.argmax(result.numpy()))
# print(lab)
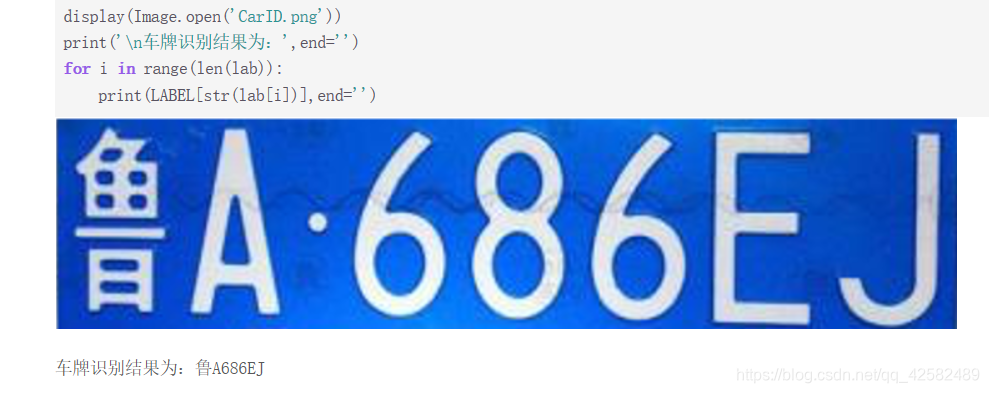
display(Image.open('CarID.png'))
print('\n车牌识别结果为:',end='')
for i in range(len(lab)):
print(LABEL[str(lab[i])],end='')
Terminar el trabajo
LeNet red definida:
Utilizamos la convolución tres capas, dos capas de la piscina, un elementos lineales, la función de excitación de la capa de salida, todavía utilizando la función de clasificación 'Softmax'.
Acerca de parámetros de la capa de convolución y capa de puesta en común se puede referir a este blog aprendizaje parámetros de la red neuronal convolucionales Significado
class MyLeNet(fluid.dygraph.Layer):
def __init__(self):
super(MyLeNet,self).__init__()
self.hidden1_1 = Conv2D(1, 28, 5, 1) # 通道数,卷积核个数,卷积核大小,填充数
self.hidden1_2 = Pool2D(pool_size=2, pool_type='max', pool_stride=1)
self.hidden2_1 = Conv2D(28, 32, 3, 1)
self.hidden2_2 = Pool2D(pool_size=2, pool_type='max', pool_stride=1)
self.hidden3 = Conv2D(32, 32, 3, 1)
self.hidden4 = Linear(32*10*10, 65, act='softmax')
def forward(self,input):
x = self.hidden1_1(input)
x = self.hidden1_2(x)
x = self.hidden2_1(x)
x = self.hidden2_2(x)
x = self.hidden3(x)
x = fluid.layers.reshape(x, shape=[-1, 32*10*10])
y = self.hidden4(x)
return y
Introduzca la unidad del tamaño de la imagen es de 1 * 20 * 20, en el grupo y discutimos cómo se calculan dentro de los parámetros
| entrada | exportación |
|---|---|
| capa de entrada (20 * 20 * 1) | 1 * 20 * 20 |
| capa de Convolución 1 (28 * 5 * 5, paso = 1) | 28 * 16 * 16 (16 = (20-5) / 1 + 1) |
| capa de la célula 1 (2 * 2, paso = 1) | 28 * 15 * 15 (15 = (16-2) / 1 + 1) |
| capa de Convolución 2 (32 * 3 * 3, paso = 1) | 32 * 13 * 13 (13 = (15-3) / 1 + 1) |
| capa piscina 2 (2 * 2, paso = 1) | 32 * 12 * 12 (12 = (13-2) / 1 + 1) |
| capa de Convolución 3 (32 * 3 * 3, paso = 1) | 32 * 10 * 10 (10 = (12-3) / 1 + 1) |
| capa Linear 4 (32 * 10 * 10 -> 65) | 10 |
Si estás en la plataforma de Baidu AIStudio, complementar directamente el código se puede ejecutar.
Si el código se copia en el plazo locales, también se necesita modificar un lugar para correr. La primera pantalla de paso 10 (Image.open ( 'CarID.png')) en
im = Image.open('CarID.PNG')
im.show()
red neuronal de convolución realmente más potente que la profundidad de la red neuronal totalmente conectada. El LeNet red CNN es un modelo clásico. Iteraciones 20 veces la precisión llegaron a 0,84, mientras que DNN necesidad de iterar Día 02 200 veces para lograr esta precisión. Cuando se prueba con la imagen CarID.jpg, los resultados son generalmente exactas, hay poco mal.

Continuar entrenamiento iterativo, LeNet 50 iteraciones tasa de precisión de 0,92, la tasa de precisión es bastante alto; precisa alcanzó 0,945 después de 100 iteraciones, la exactitud puede ser una identificación bien de la placa de matrícula; precisión iteración después de 200 es 0,965, la actualización no es muy grande, y tal vez se pueden considerar otros parámetros optimizados.
Realizado con la prueba de imagen de la matrícula, el resultado es completamente correcto, esta red LeNet realmente potente.
Por supuesto, también podemos seguir aumentando capas y capas de convolución piscina de entrenamiento, las capas profundas de la exactitud sin duda más elevadas, sino también prestar atención para evitar un exceso de ajuste.
