Two-stage target detection algorithm based on
A, Two-stage basic introduction
- CNN convolution feature
- R. Girshick et al., 2014 proposed to faster RCNN RCNN
- End of the target detector (RPN network)
- High accuracy, one-stage speed is relatively slow
Two-stage target detection algorithms target detection is accomplished primarily through a complete neural network convolution process, when used in target detection is the characteristic feature of CNN, i.e. extracts the feature of the region of the target by a candidate CNN description of
Two, Two-stage basic process
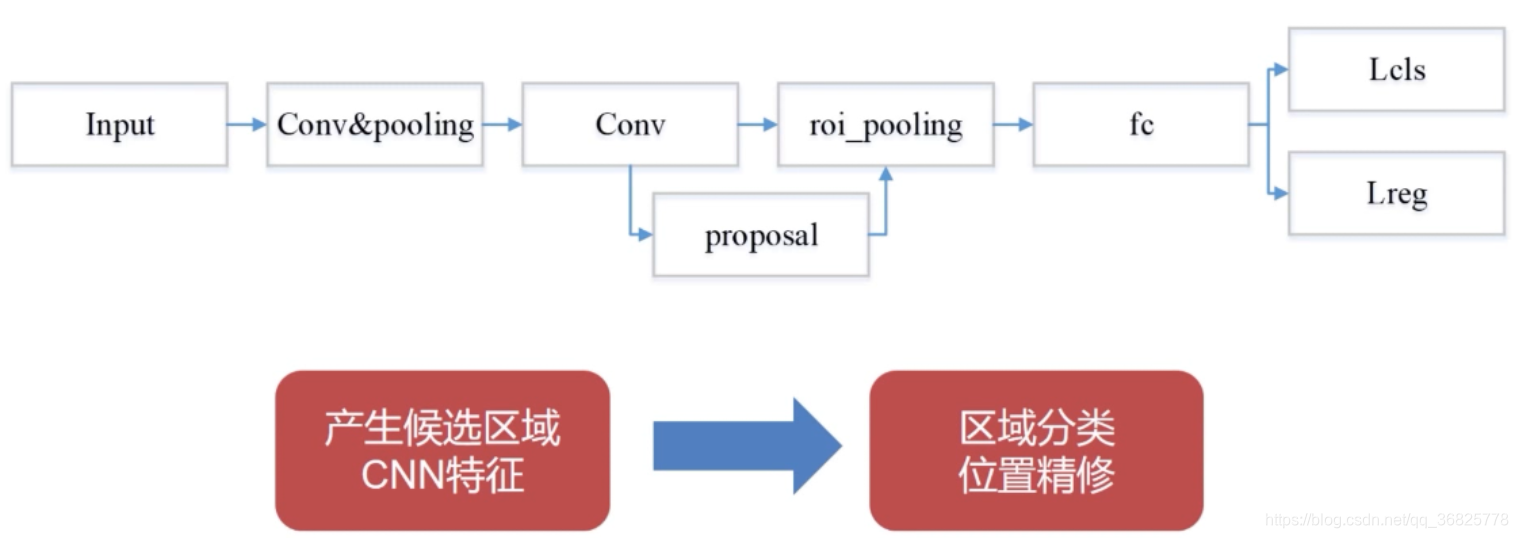
First, input a picture and image feature extraction depth, i.e. a map as an input through a convolutional neural network, commonly referred to as the backbone network , the backbone network typically comprises VGG, ResNet a convolutional neural and some classic network, and then be accomplished by sliding a conventional network RPN target detection algorithm task window, the candidate region is generated, these candidate regions will be accomplished by RPN network, and performing region extraction candidate frame when the frame completion candidate when region classification, the classification process will be classified as a background region candidate block and the target two different classes, and generates the candidate area network RPN position of the target will make a preliminary prediction, the area classification is completed and the finishing position of two link, after obtaining the candidate region, further precise positional correction and regression of the candidate region through roi_pooling layer, may be understood as roi_pooling matting, to obtain the next candidate object to the corresponding features on the feature map, would fc by a layer, further characterized by a table of candidate regions Followed accomplished by classification and regression classes, respectively, and determination of the candidate target refined candidate target position, where the category is different from the category RPN network, here generally get real object classes, primary regression to obtain the current target specific coordinate position, usually expressed as a rectangular frame, i.e., four values (x, y, w, h )
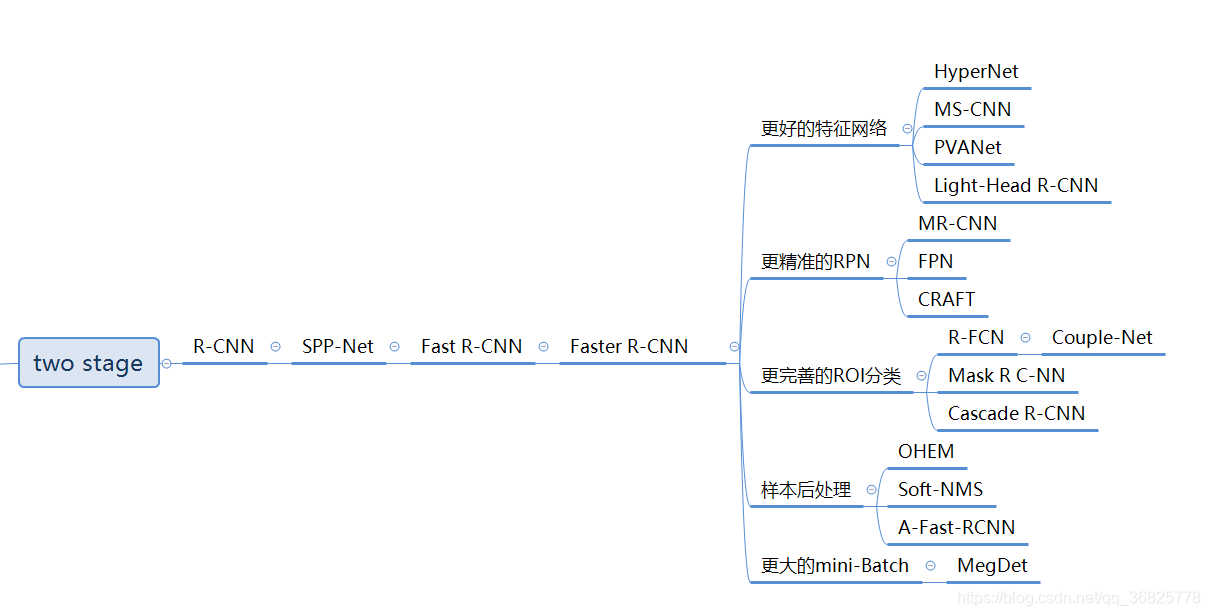
Three, Two-stage common algorithm
- RCNN
- Fast RCNN
- Faster RCNN
- Faster RCNN variant