1, the relevant API
(1), the value of the most
DEF FUNC (Data):
Pass
# FUNC handler
# Axis axial [0,1]
# Array array
np.apply_along_axis (func, axis, array)
(3), convolution
= C numpy.convolve (A, b, convolution type)
A = [. 1, 2,. 3,. 4,. 5 ] the original array
b = [. 8,. 7,. 6 ] convolution kernel array
used as a convolution kernel b, of a process of performing convolution operation of the array as follows:
446,586 valid convolution (valid)
23 is 446586 59 with dimensional convolution (same)
. 8 59 446 586 30 23 is complete convolution (full)
0 0 . 1 2. 4. 3 . 5 0 0
. 6. 7. 8
. 6. 7. 8
. 6. 7. 8
. 6. 7. 8
. 6. 7. 8
. 6. 7. 8
. 6. 7. 8
(4), in line with the least squares method to calculate the minimum error fitting coefficients (the only solution is not required, but required the minimum error solution)
= X np.linalg.lstsq (A, B) [0]
# A, B is a sample value
(5), the arithmetic mean and a weighted average,
Arithmetic mean:
np.mean (Array)
or array.mean ()
Weighted average:
np.average (closing_prices, Volumes weights =)
Note: The arithmetic mean is a weighted average understood equally weighted.
(6) Other
Median: median, poor: ptp.
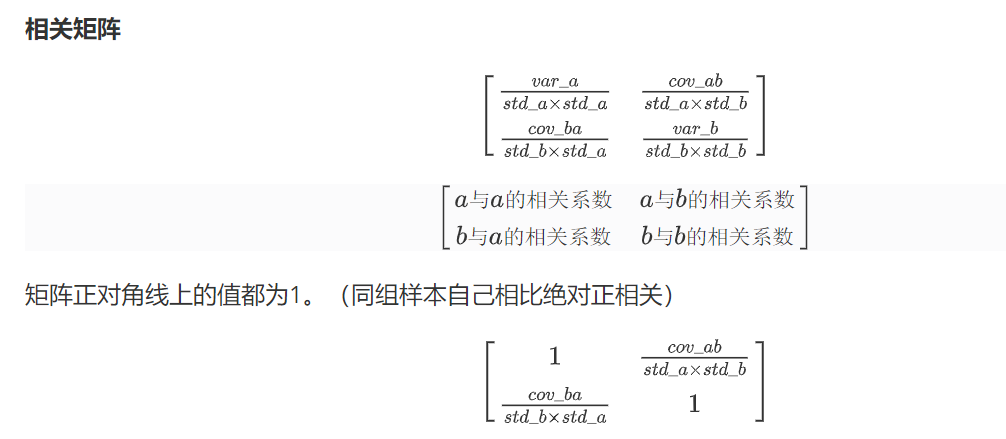
numpy.corrcoef (A, B) # find correlation matrix
numpy.cov (A, B) # Covariance Matrix
3, polynomial fitting related API
The fitted values obtained from the fit coefficients and variables, whereby to obtain the sample data curve fit coordinates [X-, the Y ' ]
np.polyval (P, X-) -> the Y '
polynomial derivation function, fitting coefficients according to obtaining the derivatives of the polynomial function coefficients
np.polyder (P) -> Q
known polynomial coefficients of the polynomial roots find Q (x-axis and the abscissa intersection)
XS = np.roots (Q)
two polynomial function of the difference between coefficients of the functions (the intersection of the two curves may be ascertained through the root difference function)
Q = np.polysub (Pl, P2)
4, data smoothing
Smoothing processing generally comprises a noise data fitting and other operations. Intended for purposes of noise reduction features remove additional factors, intended to fit the mathematical modeling, mathematical methods can be more identifying characteristic curve.