In scenes with dense traffic such as shopping malls and supermarkets, it is often reported that some pedestrians fall and get injured on escalators. With the rapid development and popularization of AI technology, more and more scenes such as shopping malls, supermarkets and subways have begun to Install a dedicated safety detection and early warning system. The core working principle is the real-time calculation of the AI model and the camera image and video stream. Through real-time detection and identification of behaviors on the behavioral escalator, rapid warning and response to dangerous behaviors can be performed to avoid subsequent serious consequences. as a result of. The main purpose of this article is to develop and construct a pedestrian safety behavior detection and identification system based on the scene of supermarket escalators, and explore and analyze the feasibility of improving safety assurance based on AI technology. This article is the sixth article about AI helping to improve the safety of shopping mall escalators and other scenes. , the previous series is as follows:
《科技提升安全,基于SSD开发构建商超扶梯场景下行人安全行为姿态检测识别系统》
https://blog.csdn.net/Together_CZ/article/details/134892776
《科技提升安全,基于YOLOv3开发构建商超扶梯场景下行人安全行为姿态检测识别系统》
https://blog.csdn.net/Together_CZ/article/details/134892866
《科技提升安全,基于YOLOv4开发构建商超扶梯场景下行人安全行为姿态检测识别系统》
https://blog.csdn.net/Together_CZ/article/details/134893058
《科技提升安全,基于YOLOv5系列模型【n/s/m/l/x】开发构建商超扶梯场景下行人安全行为姿态检测识别系统》
https://blog.csdn.net/Together_CZ/article/details/134918766
《科技提升安全,基于YOLOv6开发构建商超扶梯场景下行人安全行为姿态检测识别系统》
https://blog.csdn.net/Together_CZ/article/details/134925452
First look at the example effect:
YOLOv7 is the latest YOLO structure in the YOLO series. In the range of 5 frames/second to 160 frames/second, its speed and accuracy exceed most known object detectors. It is known in GPU V100 Among real-time object detectors above 30 frames/second, YOLOv7 has the highest accuracy. According to the different code running environments (edge GPU, ordinary GPU and cloud GPU), YOLOv7 sets three basic models, called YOLOv7-tiny, YOLOv7 and YOLOv7-W6. Compared with other network models in the YOLO series, the detection ideas of YOLOv7 are similar to YOLOv4 and YOLOv5. The YOLOv7 network mainly includes the four parts of Input (input), Backbone (backbone network), Neck (neck), and Head (head). . First, the image is pre-processed through a series of operations such as input part data enhancement, and then sent to the backbone network. The backbone network part extracts features from the processed image; then, the extracted features are processed by Neck module feature fusion to obtain large and medium-sized images. , three sizes of features; finally, the fused features are sent to the detection head, and the results are output after detection.
The backbone network part of the YOLOv7 network model is mainly composed of convolution, E-ELAN module, MPConv module and SPPCSPC module. In the Neck module, YOLOv7 is the same as the YOLOv5 network and also adopts the traditional PAFPN structure. FPN is the enhanced feature extraction network of YoloV7. The three effective feature layers obtained in the backbone part will be feature fused in this part. The purpose of feature fusion is to combine feature information of different scales. In the FPN part, the effective feature layers that have been obtained are used to continue feature extraction. The Panet structure is still used in YoloV7. We not only upsample the features to achieve feature fusion, but also downsample the features again to achieve feature fusion. For the Head detection head, YOLOv7 uses the IDetect detection head that represents three target sizes: large, medium, and small. The structure of the RepConv module has certain differences during training and inference.
Let’s take a brief look at the example data:


Here we mainly choose three models of yolov7-tiny, yolov7 and yolov7x with different parameter levels for development and training. The training data configuration files are as follows:
# txt path
train: ./dataset/images/train
val: ./dataset/images/test
test: ./dataset/images/test
# number of classes
nc: 4
# class names
names: ['bow', 'down', 'shake', 'up']
[yolov7-tiny] model file is as follows:
# parameters
nc: 4 # number of classes
depth_multiple: 1.0 # model depth multiple
width_multiple: 1.0 # layer channel multiple
# anchors
anchors:
- [10,13, 16,30, 33,23] # P3/8
- [30,61, 62,45, 59,119] # P4/16
- [116,90, 156,198, 373,326] # P5/32
# yolov7-tiny backbone
backbone:
# [from, number, module, args] c2, k=1, s=1, p=None, g=1, act=True
[[-1, 1, Conv, [32, 3, 2, None, 1, nn.LeakyReLU(0.1)]], # 0-P1/2
[-1, 1, Conv, [64, 3, 2, None, 1, nn.LeakyReLU(0.1)]], # 1-P2/4
[-1, 1, Conv, [32, 1, 1, None, 1, nn.LeakyReLU(0.1)]],
[-2, 1, Conv, [32, 1, 1, None, 1, nn.LeakyReLU(0.1)]],
[-1, 1, Conv, [32, 3, 1, None, 1, nn.LeakyReLU(0.1)]],
[-1, 1, Conv, [32, 3, 1, None, 1, nn.LeakyReLU(0.1)]],
[[-1, -2, -3, -4], 1, Concat, [1]],
[-1, 1, Conv, [64, 1, 1, None, 1, nn.LeakyReLU(0.1)]], # 7
[-1, 1, MP, []], # 8-P3/8
[-1, 1, Conv, [64, 1, 1, None, 1, nn.LeakyReLU(0.1)]],
[-2, 1, Conv, [64, 1, 1, None, 1, nn.LeakyReLU(0.1)]],
[-1, 1, Conv, [64, 3, 1, None, 1, nn.LeakyReLU(0.1)]],
[-1, 1, Conv, [64, 3, 1, None, 1, nn.LeakyReLU(0.1)]],
[[-1, -2, -3, -4], 1, Concat, [1]],
[-1, 1, Conv, [128, 1, 1, None, 1, nn.LeakyReLU(0.1)]], # 14
[-1, 1, MP, []], # 15-P4/16
[-1, 1, Conv, [128, 1, 1, None, 1, nn.LeakyReLU(0.1)]],
[-2, 1, Conv, [128, 1, 1, None, 1, nn.LeakyReLU(0.1)]],
[-1, 1, Conv, [128, 3, 1, None, 1, nn.LeakyReLU(0.1)]],
[-1, 1, Conv, [128, 3, 1, None, 1, nn.LeakyReLU(0.1)]],
[[-1, -2, -3, -4], 1, Concat, [1]],
[-1, 1, Conv, [256, 1, 1, None, 1, nn.LeakyReLU(0.1)]], # 21
[-1, 1, MP, []], # 22-P5/32
[-1, 1, Conv, [256, 1, 1, None, 1, nn.LeakyReLU(0.1)]],
[-2, 1, Conv, [256, 1, 1, None, 1, nn.LeakyReLU(0.1)]],
[-1, 1, Conv, [256, 3, 1, None, 1, nn.LeakyReLU(0.1)]],
[-1, 1, Conv, [256, 3, 1, None, 1, nn.LeakyReLU(0.1)]],
[[-1, -2, -3, -4], 1, Concat, [1]],
[-1, 1, Conv, [512, 1, 1, None, 1, nn.LeakyReLU(0.1)]], # 28
]
# yolov7-tiny head
head:
[[-1, 1, Conv, [256, 1, 1, None, 1, nn.LeakyReLU(0.1)]],
[-2, 1, Conv, [256, 1, 1, None, 1, nn.LeakyReLU(0.1)]],
[-1, 1, SP, [5]],
[-2, 1, SP, [9]],
[-3, 1, SP, [13]],
[[-1, -2, -3, -4], 1, Concat, [1]],
[-1, 1, Conv, [256, 1, 1, None, 1, nn.LeakyReLU(0.1)]],
[[-1, -7], 1, Concat, [1]],
[-1, 1, Conv, [256, 1, 1, None, 1, nn.LeakyReLU(0.1)]], # 37
[-1, 1, Conv, [128, 1, 1, None, 1, nn.LeakyReLU(0.1)]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[21, 1, Conv, [128, 1, 1, None, 1, nn.LeakyReLU(0.1)]], # route backbone P4
[[-1, -2], 1, Concat, [1]],
[-1, 1, Conv, [64, 1, 1, None, 1, nn.LeakyReLU(0.1)]],
[-2, 1, Conv, [64, 1, 1, None, 1, nn.LeakyReLU(0.1)]],
[-1, 1, Conv, [64, 3, 1, None, 1, nn.LeakyReLU(0.1)]],
[-1, 1, Conv, [64, 3, 1, None, 1, nn.LeakyReLU(0.1)]],
[[-1, -2, -3, -4], 1, Concat, [1]],
[-1, 1, Conv, [128, 1, 1, None, 1, nn.LeakyReLU(0.1)]], # 47
[-1, 1, Conv, [64, 1, 1, None, 1, nn.LeakyReLU(0.1)]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[14, 1, Conv, [64, 1, 1, None, 1, nn.LeakyReLU(0.1)]], # route backbone P3
[[-1, -2], 1, Concat, [1]],
[-1, 1, Conv, [32, 1, 1, None, 1, nn.LeakyReLU(0.1)]],
[-2, 1, Conv, [32, 1, 1, None, 1, nn.LeakyReLU(0.1)]],
[-1, 1, Conv, [32, 3, 1, None, 1, nn.LeakyReLU(0.1)]],
[-1, 1, Conv, [32, 3, 1, None, 1, nn.LeakyReLU(0.1)]],
[[-1, -2, -3, -4], 1, Concat, [1]],
[-1, 1, Conv, [64, 1, 1, None, 1, nn.LeakyReLU(0.1)]], # 57
[-1, 1, Conv, [128, 3, 2, None, 1, nn.LeakyReLU(0.1)]],
[[-1, 47], 1, Concat, [1]],
[-1, 1, Conv, [64, 1, 1, None, 1, nn.LeakyReLU(0.1)]],
[-2, 1, Conv, [64, 1, 1, None, 1, nn.LeakyReLU(0.1)]],
[-1, 1, Conv, [64, 3, 1, None, 1, nn.LeakyReLU(0.1)]],
[-1, 1, Conv, [64, 3, 1, None, 1, nn.LeakyReLU(0.1)]],
[[-1, -2, -3, -4], 1, Concat, [1]],
[-1, 1, Conv, [128, 1, 1, None, 1, nn.LeakyReLU(0.1)]], # 65
[-1, 1, Conv, [256, 3, 2, None, 1, nn.LeakyReLU(0.1)]],
[[-1, 37], 1, Concat, [1]],
[-1, 1, Conv, [128, 1, 1, None, 1, nn.LeakyReLU(0.1)]],
[-2, 1, Conv, [128, 1, 1, None, 1, nn.LeakyReLU(0.1)]],
[-1, 1, Conv, [128, 3, 1, None, 1, nn.LeakyReLU(0.1)]],
[-1, 1, Conv, [128, 3, 1, None, 1, nn.LeakyReLU(0.1)]],
[[-1, -2, -3, -4], 1, Concat, [1]],
[-1, 1, Conv, [256, 1, 1, None, 1, nn.LeakyReLU(0.1)]], # 73
[57, 1, Conv, [128, 3, 1, None, 1, nn.LeakyReLU(0.1)]],
[65, 1, Conv, [256, 3, 1, None, 1, nn.LeakyReLU(0.1)]],
[73, 1, Conv, [512, 3, 1, None, 1, nn.LeakyReLU(0.1)]],
[[74,75,76], 1, IDetect, [nc, anchors]], # Detect(P3, P4, P5)
]【yolov7】The model file is as follows:
# parameters
nc: 4 # number of classes
depth_multiple: 1.0 # model depth multiple
width_multiple: 1.0 # layer channel multiple
# anchors
anchors:
- [12,16, 19,36, 40,28] # P3/8
- [36,75, 76,55, 72,146] # P4/16
- [142,110, 192,243, 459,401] # P5/32
# yolov7 backbone
backbone:
# [from, number, module, args]
[[-1, 1, Conv, [32, 3, 1]], # 0
[-1, 1, Conv, [64, 3, 2]], # 1-P1/2
[-1, 1, Conv, [64, 3, 1]],
[-1, 1, Conv, [128, 3, 2]], # 3-P2/4
[-1, 1, Conv, [64, 1, 1]],
[-2, 1, Conv, [64, 1, 1]],
[-1, 1, Conv, [64, 3, 1]],
[-1, 1, Conv, [64, 3, 1]],
[-1, 1, Conv, [64, 3, 1]],
[-1, 1, Conv, [64, 3, 1]],
[[-1, -3, -5, -6], 1, Concat, [1]],
[-1, 1, Conv, [256, 1, 1]], # 11
[-1, 1, MP, []],
[-1, 1, Conv, [128, 1, 1]],
[-3, 1, Conv, [128, 1, 1]],
[-1, 1, Conv, [128, 3, 2]],
[[-1, -3], 1, Concat, [1]], # 16-P3/8
[-1, 1, Conv, [128, 1, 1]],
[-2, 1, Conv, [128, 1, 1]],
[-1, 1, Conv, [128, 3, 1]],
[-1, 1, Conv, [128, 3, 1]],
[-1, 1, Conv, [128, 3, 1]],
[-1, 1, Conv, [128, 3, 1]],
[[-1, -3, -5, -6], 1, Concat, [1]],
[-1, 1, Conv, [512, 1, 1]], # 24
[-1, 1, MP, []],
[-1, 1, Conv, [256, 1, 1]],
[-3, 1, Conv, [256, 1, 1]],
[-1, 1, Conv, [256, 3, 2]],
[[-1, -3], 1, Concat, [1]], # 29-P4/16
[-1, 1, Conv, [256, 1, 1]],
[-2, 1, Conv, [256, 1, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[[-1, -3, -5, -6], 1, Concat, [1]],
[-1, 1, Conv, [1024, 1, 1]], # 37
[-1, 1, MP, []],
[-1, 1, Conv, [512, 1, 1]],
[-3, 1, Conv, [512, 1, 1]],
[-1, 1, Conv, [512, 3, 2]],
[[-1, -3], 1, Concat, [1]], # 42-P5/32
[-1, 1, Conv, [256, 1, 1]],
[-2, 1, Conv, [256, 1, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[[-1, -3, -5, -6], 1, Concat, [1]],
[-1, 1, Conv, [1024, 1, 1]], # 50
]
# yolov7 head
head:
[[-1, 1, SPPCSPC, [512]], # 51
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[37, 1, Conv, [256, 1, 1]], # route backbone P4
[[-1, -2], 1, Concat, [1]],
[-1, 1, Conv, [256, 1, 1]],
[-2, 1, Conv, [256, 1, 1]],
[-1, 1, Conv, [128, 3, 1]],
[-1, 1, Conv, [128, 3, 1]],
[-1, 1, Conv, [128, 3, 1]],
[-1, 1, Conv, [128, 3, 1]],
[[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
[-1, 1, Conv, [256, 1, 1]], # 63
[-1, 1, Conv, [128, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[24, 1, Conv, [128, 1, 1]], # route backbone P3
[[-1, -2], 1, Concat, [1]],
[-1, 1, Conv, [128, 1, 1]],
[-2, 1, Conv, [128, 1, 1]],
[-1, 1, Conv, [64, 3, 1]],
[-1, 1, Conv, [64, 3, 1]],
[-1, 1, Conv, [64, 3, 1]],
[-1, 1, Conv, [64, 3, 1]],
[[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
[-1, 1, Conv, [128, 1, 1]], # 75
[-1, 1, MP, []],
[-1, 1, Conv, [128, 1, 1]],
[-3, 1, Conv, [128, 1, 1]],
[-1, 1, Conv, [128, 3, 2]],
[[-1, -3, 63], 1, Concat, [1]],
[-1, 1, Conv, [256, 1, 1]],
[-2, 1, Conv, [256, 1, 1]],
[-1, 1, Conv, [128, 3, 1]],
[-1, 1, Conv, [128, 3, 1]],
[-1, 1, Conv, [128, 3, 1]],
[-1, 1, Conv, [128, 3, 1]],
[[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
[-1, 1, Conv, [256, 1, 1]], # 88
[-1, 1, MP, []],
[-1, 1, Conv, [256, 1, 1]],
[-3, 1, Conv, [256, 1, 1]],
[-1, 1, Conv, [256, 3, 2]],
[[-1, -3, 51], 1, Concat, [1]],
[-1, 1, Conv, [512, 1, 1]],
[-2, 1, Conv, [512, 1, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
[-1, 1, Conv, [512, 1, 1]], # 101
[75, 1, RepConv, [256, 3, 1]],
[88, 1, RepConv, [512, 3, 1]],
[101, 1, RepConv, [1024, 3, 1]],
[[102,103,104], 1, IDetect, [nc, anchors]], # Detect(P3, P4, P5)
]【yolov7x】The model file is as follows:
# parameters
nc: 4 # number of classes
depth_multiple: 1.0 # model depth multiple
width_multiple: 1.0 # layer channel multiple
# anchors
anchors:
- [12,16, 19,36, 40,28] # P3/8
- [36,75, 76,55, 72,146] # P4/16
- [142,110, 192,243, 459,401] # P5/32
# yolov7 backbone
backbone:
# [from, number, module, args]
[[-1, 1, Conv, [40, 3, 1]], # 0
[-1, 1, Conv, [80, 3, 2]], # 1-P1/2
[-1, 1, Conv, [80, 3, 1]],
[-1, 1, Conv, [160, 3, 2]], # 3-P2/4
[-1, 1, Conv, [64, 1, 1]],
[-2, 1, Conv, [64, 1, 1]],
[-1, 1, Conv, [64, 3, 1]],
[-1, 1, Conv, [64, 3, 1]],
[-1, 1, Conv, [64, 3, 1]],
[-1, 1, Conv, [64, 3, 1]],
[-1, 1, Conv, [64, 3, 1]],
[-1, 1, Conv, [64, 3, 1]],
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
[-1, 1, Conv, [320, 1, 1]], # 13
[-1, 1, MP, []],
[-1, 1, Conv, [160, 1, 1]],
[-3, 1, Conv, [160, 1, 1]],
[-1, 1, Conv, [160, 3, 2]],
[[-1, -3], 1, Concat, [1]], # 18-P3/8
[-1, 1, Conv, [128, 1, 1]],
[-2, 1, Conv, [128, 1, 1]],
[-1, 1, Conv, [128, 3, 1]],
[-1, 1, Conv, [128, 3, 1]],
[-1, 1, Conv, [128, 3, 1]],
[-1, 1, Conv, [128, 3, 1]],
[-1, 1, Conv, [128, 3, 1]],
[-1, 1, Conv, [128, 3, 1]],
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
[-1, 1, Conv, [640, 1, 1]], # 28
[-1, 1, MP, []],
[-1, 1, Conv, [320, 1, 1]],
[-3, 1, Conv, [320, 1, 1]],
[-1, 1, Conv, [320, 3, 2]],
[[-1, -3], 1, Concat, [1]], # 33-P4/16
[-1, 1, Conv, [256, 1, 1]],
[-2, 1, Conv, [256, 1, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
[-1, 1, Conv, [1280, 1, 1]], # 43
[-1, 1, MP, []],
[-1, 1, Conv, [640, 1, 1]],
[-3, 1, Conv, [640, 1, 1]],
[-1, 1, Conv, [640, 3, 2]],
[[-1, -3], 1, Concat, [1]], # 48-P5/32
[-1, 1, Conv, [256, 1, 1]],
[-2, 1, Conv, [256, 1, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
[-1, 1, Conv, [1280, 1, 1]], # 58
]
# yolov7 head
head:
[[-1, 1, SPPCSPC, [640]], # 59
[-1, 1, Conv, [320, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[43, 1, Conv, [320, 1, 1]], # route backbone P4
[[-1, -2], 1, Concat, [1]],
[-1, 1, Conv, [256, 1, 1]],
[-2, 1, Conv, [256, 1, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
[-1, 1, Conv, [320, 1, 1]], # 73
[-1, 1, Conv, [160, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[28, 1, Conv, [160, 1, 1]], # route backbone P3
[[-1, -2], 1, Concat, [1]],
[-1, 1, Conv, [128, 1, 1]],
[-2, 1, Conv, [128, 1, 1]],
[-1, 1, Conv, [128, 3, 1]],
[-1, 1, Conv, [128, 3, 1]],
[-1, 1, Conv, [128, 3, 1]],
[-1, 1, Conv, [128, 3, 1]],
[-1, 1, Conv, [128, 3, 1]],
[-1, 1, Conv, [128, 3, 1]],
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
[-1, 1, Conv, [160, 1, 1]], # 87
[-1, 1, MP, []],
[-1, 1, Conv, [160, 1, 1]],
[-3, 1, Conv, [160, 1, 1]],
[-1, 1, Conv, [160, 3, 2]],
[[-1, -3, 73], 1, Concat, [1]],
[-1, 1, Conv, [256, 1, 1]],
[-2, 1, Conv, [256, 1, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
[-1, 1, Conv, [320, 1, 1]], # 102
[-1, 1, MP, []],
[-1, 1, Conv, [320, 1, 1]],
[-3, 1, Conv, [320, 1, 1]],
[-1, 1, Conv, [320, 3, 2]],
[[-1, -3, 59], 1, Concat, [1]],
[-1, 1, Conv, [512, 1, 1]],
[-2, 1, Conv, [512, 1, 1]],
[-1, 1, Conv, [512, 3, 1]],
[-1, 1, Conv, [512, 3, 1]],
[-1, 1, Conv, [512, 3, 1]],
[-1, 1, Conv, [512, 3, 1]],
[-1, 1, Conv, [512, 3, 1]],
[-1, 1, Conv, [512, 3, 1]],
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
[-1, 1, Conv, [640, 1, 1]], # 117
[87, 1, Conv, [320, 3, 1]],
[102, 1, Conv, [640, 3, 1]],
[117, 1, Conv, [1280, 3, 1]],
[[118,119,120], 1, IDetect, [nc, anchors]], # Detect(P3, P4, P5)
]Keep the same parameter settings during the experimental phase, and wait until all training is completed to conduct a comprehensive comparative analysis from multiple indicator dimensions.
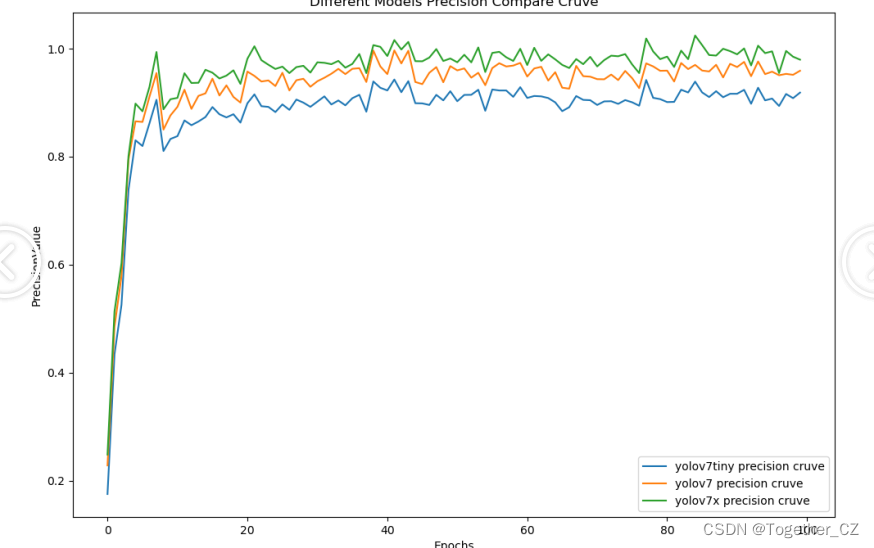
[Precision Curve]
The Precision-Recall Curve is a visualization tool used to evaluate the accuracy performance of a binary classification model under different thresholds. It helps us understand how the model performs at different thresholds by plotting the relationship between precision and recall at different thresholds.
Precision refers to the ratio of the number of samples that are correctly predicted as positive examples to the number of samples that are predicted to be positive examples. Recall refers to the ratio of the number of samples that are correctly predicted as positive examples to the number of samples that are actually positive examples.
The steps for plotting a precision curve are as follows:
Convert the predicted probabilities into binary class labels using different thresholds. Usually, when the predicted probability is greater than the threshold, the sample is classified as a positive example, otherwise it is classified as a negative example.
For each threshold, calculate the corresponding precision and recall.
Plot the precision and recall at each threshold on the same chart to form a precision curve.
Based on the shape and changing trend of the accuracy curve, an appropriate threshold can be selected to achieve the required performance requirements.
By observing the precision curve, we can determine the best threshold according to needs to balance precision and recall. Higher precision means fewer false positives, while higher recall means fewer false negatives. Depending on specific business needs and cost trade-offs, appropriate operating points or thresholds can be selected on the curve.
Precision curves are often used together with recall curves to provide a more comprehensive analysis of classifier performance and help evaluate and compare the performance of different models.
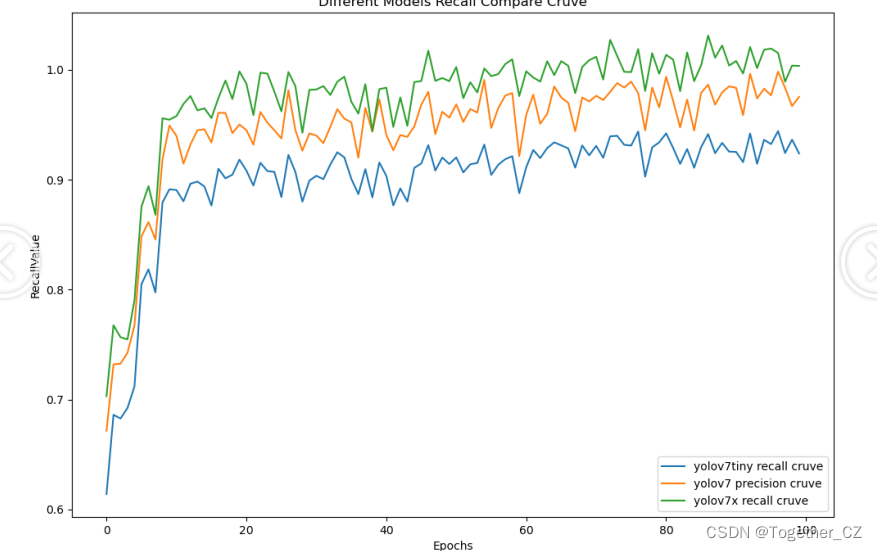
[Recall Curve]
Recall Curve is a visualization tool used to evaluate the recall performance of a binary classification model under different thresholds. It helps us understand the performance of the model under different thresholds by plotting the relationship between the recall rate at different thresholds and the corresponding precision rate.
Recall refers to the ratio of the number of samples that are correctly predicted as positive examples to the number of samples that are actually positive examples. Recall rate is also called sensitivity (Sensitivity) or true positive rate (True Positive Rate).
The steps for plotting a recall curve are as follows:
Convert the predicted probabilities into binary class labels using different thresholds. Usually, when the predicted probability is greater than the threshold, the sample is classified as a positive example, otherwise it is classified as a negative example.
For each threshold, calculate the corresponding recall rate and the corresponding precision rate.
Plot the recall and precision at each threshold on the same chart to form a recall curve.
Based on the shape and changing trend of the recall curve, an appropriate threshold can be selected to achieve the required performance requirements.
By observing the recall curve, we can determine the best threshold according to needs to balance recall and precision. Higher recall means fewer false negatives, while higher precision means fewer false positives. Depending on specific business needs and cost trade-offs, appropriate operating points or thresholds can be selected on the curve.
The recall curve is often used together with the precision curve (Precision Curve) to provide a more comprehensive analysis of classifier performance and help evaluate and compare the performance of different models.
[F1 value curve]
The F1 value curve is a visual tool used to evaluate the performance of a binary classification model under different thresholds. It helps us understand the overall performance of the model by plotting the relationship between Precision, Recall and F1 score at different thresholds.
The F1 score is the harmonic average of precision and recall, which takes into account both performance indicators. The F1 value curve can help us determine a balance point between different precision and recall rates to choose the best threshold.
The steps to draw an F1 value curve are as follows:
Convert the predicted probabilities into binary class labels using different thresholds. Usually, when the predicted probability is greater than the threshold, the sample is classified as a positive example, otherwise it is classified as a negative example.
For each threshold, calculate the corresponding precision, recall and F1 score.
Plot the precision rate, recall rate and F1 score at each threshold on the same chart to form an F1 value curve.
Based on the shape and changing trend of the F1 value curve, an appropriate threshold can be selected to achieve the required performance requirements.
The F1 value curve is often used together with the receiver operating characteristic curve (ROC curve) to help evaluate and compare the performance of different models. They provide a more comprehensive analysis of classifier performance, allowing the selection of appropriate models and threshold settings based on specific application scenarios.
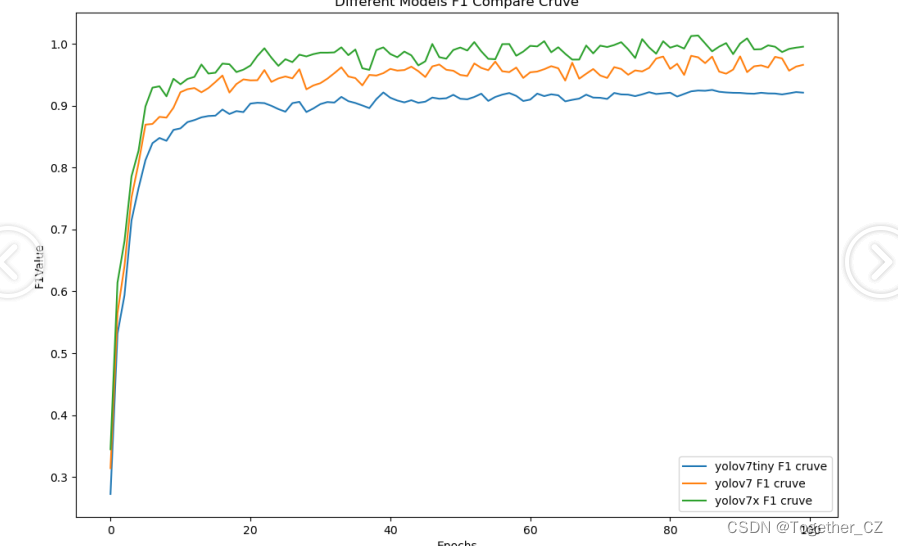
It is not difficult to find that the model accuracy of the tiny series is the lowest after the overall comparison and analysis. The model accuracy of the yolov7 and yolov7x series is relatively close, but yolov7 has the advantage of speed and will be used first when actually choosing to implement it. for development and design. yolov7 model