论文地址:Excellent-Paper-For-Daily-Reading/application/centerline at main
Category: Application - Centerline
Time: 2023/11/06
Summary
Line laser stripe center extraction is the key to realizing three-dimensional scanning of line laser cameras. A line laser camera was developed based on laser triangulation method. It was optimized based on the traditional Steger method and a method suitable for extracting the light stripe center of line laser cameras was proposed. Preprocess the image, use the Canny operator to find the edge of the light strip, obtain the extreme value of the edge of the light strip and calculate the ROI area, use Gaussian filtering to process the extracted image, and use the Hessian matrix to find the normal direction of the center of the light strip. Perform a second-order Taylor expansion in the normal direction to determine the center point of the light strip, and finally connect and smooth the center points to achieve accurate extraction of the center line. Experiments show that this method can accurately find the center of the light bar under different backgrounds and light source environments. The average root mean square error of the light bar center under different conditions is less than 0.4, and the three-dimensional point cloud of the part can be accurately scanned.
experiment
Comparison results of Canny, Sobel and Laplace edge detection operators:
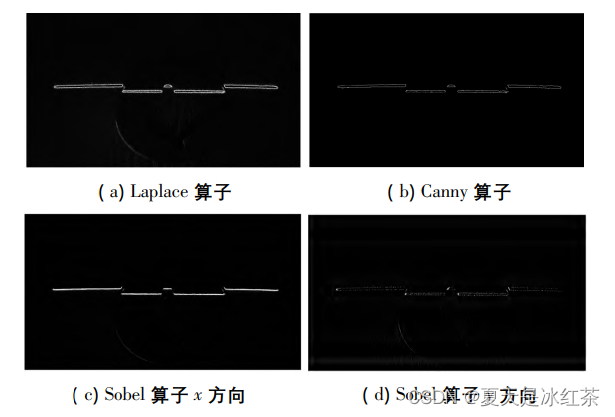
It can be seen from the figure that the line laser edge detected by the Canny operator is clearer and more accurate. Using the Canny operator as an edge detection method, an adaptive ROI range calculation is designed.