Since the one-click installation is successful and an error is reported after opening the track:
[ERROR] evo module evo.main_traj crashed - no logfile written (disabled)
It won’t solve the problem, so just use the source code installation method directly: as follows
1. Download the source code from https://github.com/MichaelGrupp/evo , you can use the terminal to enter:
git clone https://github.com/MichaelGrupp/evo.git
2. Enter the evo-master folder and execute: pip install --editable . --upgrade --no-binary evo and an error is reported:

Use pip install rosbag -i https://pypi.tuna.tsinghua.edu.cn/simple to install it

Rosbag has been installed, but it shows that it is installed in python2.7 in the ros environment.
Still the same with pip3:

3. After researching for a period of time, I found:

My computer's pip and pip3 both use python3.6, but the installation of evo requires python2, so try to change the python version used by pip:
Confirm whether python 2 and 3 exist and check the location.
implement:
cd /usr/local/lib
sudo curl https://bootstrap.pypa.io/pip/2.7/get-pip.py -o get-pip.py
sudo python get-pip.py
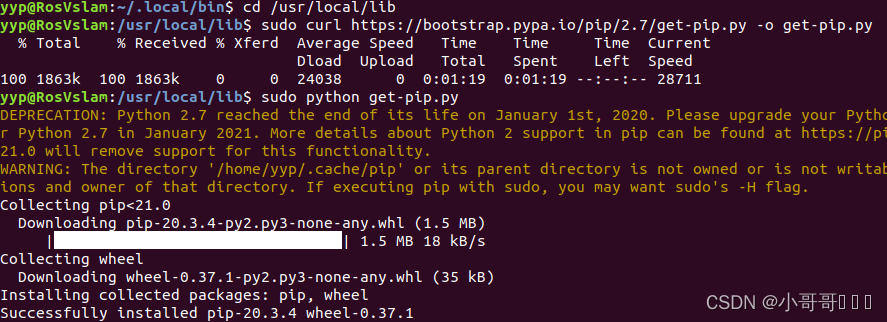
Successfully installed pip2.

I found that I used pip2 to install python2.7. Both pip and pip3 here use python3.6.
4. Enter the evo-master folder and execute: pip2 install --editable . --upgrade --no-binary evo

The output requires me to upgrade pip and then operate it again, which I don't understand.
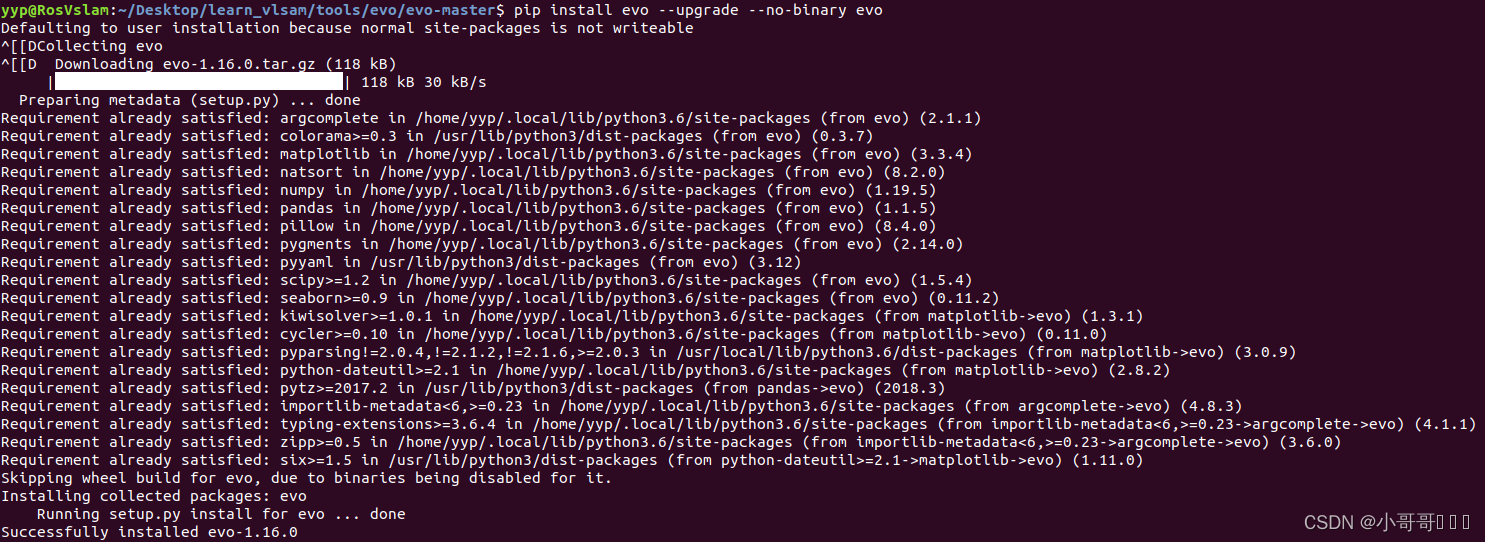
5. Execute directly:
pip install evo --upgrade --no-binary evo One-click installation also shows no problem.
I still get an error when I run the trajectory file again. It means that the installation of python3 will definitely not work, but we have already installed pip2 and execute directly:
pip2 install evo --upgrade --no-binary evo -i https://pypi.tuna.tsinghua.edu.cn/simple

Installed successfully with pyhton2.
6. Execute: evo_traj tum groundtruth.txt -p to test a single trajectory:

Run successfully.
7. Summary
Both installation methods should be possible here, but I can only use the one-click installation of python2 here. The problem of source code installation has not been resolved yet.
evo is a good trajectory evaluation tool. It can align trajectories based on timestamps, stretch and align trajectories of different scales according to the standard trajectories you specify, and calculate evaluation parameters such as mean square error for evaluation. slam algorithm performance.
Reference: Installation and use of the evaluation tool evo_Wuyuhub's blog-CSDN blog , evo was installed successfully, but an error evo module evo.main_traj crashed - no logfile written (disabled)-CSDN blog