The installation of ROS on Ubuntu 20.04 is almost the same as Ubuntu 18.04. There are basically no problems in the installation process. Just follow the tutorial below.
1. Replacement source:
1. Backup source files
sudo cp /etc/apt/sources.list /etc/apt/sources.list.bak
2. Edit the source file
This command may be slow to open the source file
sudo gedit /etc/apt/sources.list
Replace the file with
deb https://mirrors.ustc.edu.cn/ubuntu/ focal main restricted universe multiverse
deb https://mirrors.ustc.edu.cn/ubuntu/ focal-updates main restricted universe multiverse
deb https://mirrors.ustc.edu.cn/ubuntu/ focal-backports main restricted universe multiverse
deb https://mirrors.ustc.edu.cn/ubuntu/ focal-security main restricted universe multiverse
# deb-src https://mirrors.ustc.edu.cn/ubuntu/ focal main restricted universe multiverse
# deb-src https://mirrors.ustc.edu.cn/ubuntu/ focal-updates main restricted universe multiverse
# deb-src https://mirrors.ustc.edu.cn/ubuntu/ focal-backports main restricted universe multiverse
# deb-src https://mirrors.ustc.edu.cn/ubuntu/ focal-security main restricted universe multiverse
## Pre-released source, not recommended.
# deb https://mirrors.ustc.edu.cn/ubuntu/ focal-proposed main restricted universe multiverse
# deb-src https://mirrors.ustc.edu.cn/ubuntu/ focal-proposed main restricted universe multiverse
then execute
sudo apt-get update
Re-execute
sudo apt-get upgrade
2. Set the software source:
1. Add ROS software source
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
2. Add key
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654

3. Install Ros-noetic:
1. Update
sudo apt-get update
2. Installation
sudo apt-get install ros-noetic-desktop-full
sudo apt-get install ros-noetic-rqt*
Fourth, initialize rosdep:
This step will usually go wrong! ! ! ! ! ! ! Follow the steps below to be successful!
1. Create a new folder and enter the folder
sudo mkdir -p /home/one/git/
cd /home/one/git/
2. Download project
sudo git clone https://gitee.com/one_DS/rosdistro.git
If you can't find the command, just install git
sudo apt-get install git
3. Open another terminal and back up the original file
sudo cp /usr/lib/python3/dist-packages/rosdep2/main.py /usr/lib/python3/dist-packages/rosdep2/main.py.bak
sudo cp /usr/lib/python3/dist-packages/rosdep2/rep3.py /usr/lib/python3/dist-packages/rosdep2/rep3.py.bak
sudo cp /usr/lib/python3/dist-packages/rosdistro/__init__.py /usr/lib/python3/dist-packages/rosdistro/__init__.py.bak
sudo cp /usr/lib/python3/dist-packages/rosdep2/sources_list.py /usr/lib/python3/dist-packages/rosdep2/sources_list.py.bak
4. Install rosdep
sudo apt install python3-rosdep2
5. Replace the original file URL with a local file
sudo gedit /usr/lib/python3/dist-packages/rosdep2/main.py
sudo gedit /usr/lib/python3/dist-packages/rosdep2/rep3.py
sudo gedit /usr/lib/python3/dist-packages/rosdistro/__init__.py
sudo gedit /usr/lib/python3/dist-packages/rosdep2/sources_list.py
Replace all https://raw.githubusercontent.com/ros/rosdistro/master in the file with file:///home/one/git/rosdistro (if the sentence cannot be found in any file, it will not be replaced)
6. Run
sudo rosdep init

That's it!
In case of error:
(1) Error 1
ERROR: cannot download default sources list from:
https : //raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list
Website may be down.
Normally, this step should be successful. If this error occurs, it means that the replacement was not successful! ! ! Go back to 5. Replace the URL of the original file to the local download and replace it again. Remember to save it! !
(2) Error 2
After running sudo rosdep init the following error appears:
ERROR: default sources list file already exists:
/etc/ros/rosdep/sources.list.d/20-default.list
Please delete if you wish to re-initialize
implement
sudo rm /etc/ros/rosdep/sources.list.d/20-default.list
Re-execute
sudo rosdep init
7. Backup and replace
sudo cp /etc/ros/rosdep/sources.list.d/20-default.list /etc/ros/rosdep/sources.list.d/20-default.list.bak
sudo gedit /etc/ros/rosdep/sources.list.d/20-default.list
Replace all https://raw.githubusercontent.com/ros/rosdistro/master in the file with file:///home/one/git/rosdistro
8. Run
rosdep update
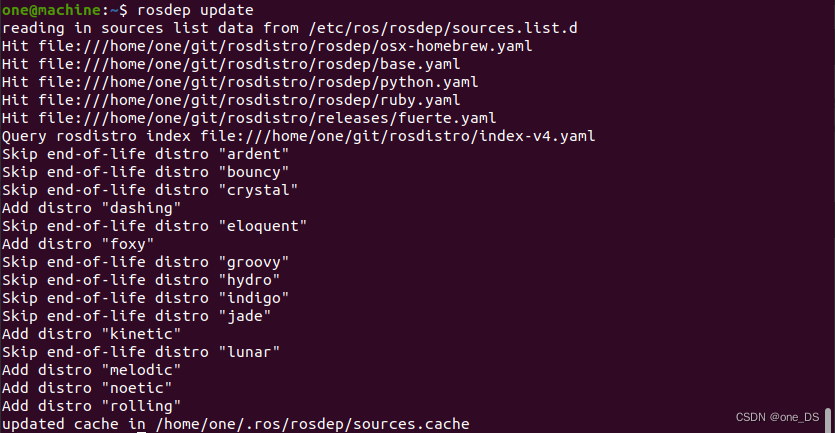
That's it! !
Note: The file /home/one/git/rosdistro cannot be deleted and is kept. Because we are directly pointing to the local.
5. Set environment variables
1. Add
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
2. Effective
source ~/.bashrc
6. Install rosinstall
sudo apt install python3-rosinstall python3-rosinstall-generator python3-wstool
7. Verify that ROS is installed successfully
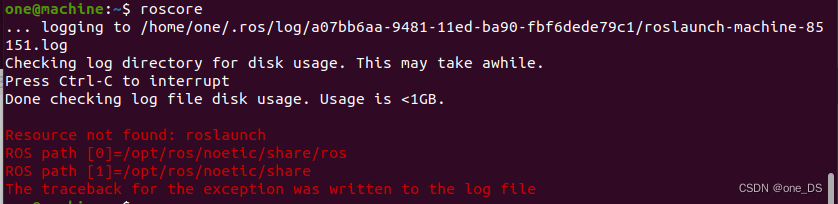
roscore
If it appears:

Execute:
sudo apt install python3-roslaunch
Then it appears when executing roscore:
execute:
sudo apt install ros-noetic-desktop-full
Restart and restart roscore to start normally.
8. Test the little turtle
Open three terminals and enter the following:
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key