This proposal proposes an extrapolation filter-based Intra Prediction (EIP) mode. First, extrapolation filter coefficients are obtained from adjacent reconstructed pixels of the current block using a predetermined template. The extrapolation is then processed position by position from top left to bottom right within the current block to generate a prediction block.
The proposed EIP model is divided into the following three steps:
1. Search for mean and maximum and minimum values
Similar to CCCM mode, the average value should be removed when providing input to the EIP filter. The DC mode value of the current block is used as the average value of the EIP prediction, calculated as shown in the following figure:

The minimum and maximum values are searched from the reconstructed pixels in the reconstructed area adjacent to thirteen columns and thirteen rows.

2. Derivation of EIP filter coefficients
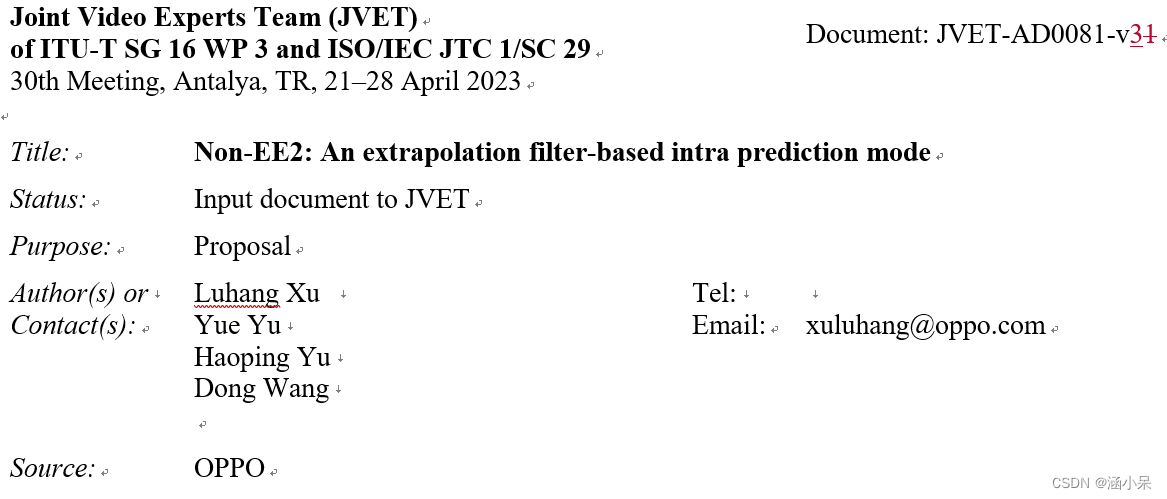
The filter coefficients are derived from the pixels of the adjacent reconstructed areas. This paper proposes three types of reconstructed areas and three filter shapes. The three adjacent reconstructed areas are shown in the figure below.
The three filter shapes used are shown in the figure below. The selected filter slides in the selected reconstruction area with a step size of one pixel to collect the input pixels and output pixels of the EIP, and remove them during the calculation of the filter. mean. The EIP coefficients are solved by minimizing the MSE.

3. Calculate the predicted pixels
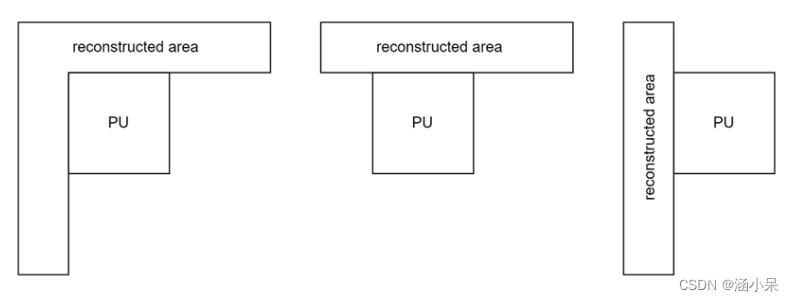
The EIP mode predicts the current block position position by position, as shown in the figure below.
- For positions located in the upper left corner of the current block, the input to the EIP filter is the reconstructed sample.
- For positions on the current block boundary, part of the input to the EIP filter is the reference sample, and part of the input to the EIP filter is the previously predicted sample.
- For other positions in the current block, the input to the EIP filter is the previously predicted samples.
In order to reduce the forecast error apply the minimum and maximum values searched in the first step to limit the output range of each forecast value

- pred(x, y) is the predicted value at (x, y) in the current block
- min and max searches for minimum and maximum values from thirteen reconstructed columns and rows,
- Ci is the ith coefficient of the derived EIP filter,
- t_((x-xoffset, y-yoffset)) is the reconstructed or predicted value for the prediction at the current position,
- mean is the value calculated by the DC prediction mode.
The predicted value of the EIP mode can be calculated through the above process.
Its performance on ECM8.0 is shown in the table below:

The prediction mode proposed in this proposal is similar to the recursive filtering mode in the AV1 standard. The prediction value is calculated pixel by pixel through the filter coefficients. The difference is that the filter coefficients in the recursive filtering mode in AV1 are fixed and pre-stored in memory. Among them, the EIP mode proposed in this proposal is calculated based on the reconstructed pixels adjacent to the coding block, which is more flexible and quite an interesting idea.