Motor Schematic
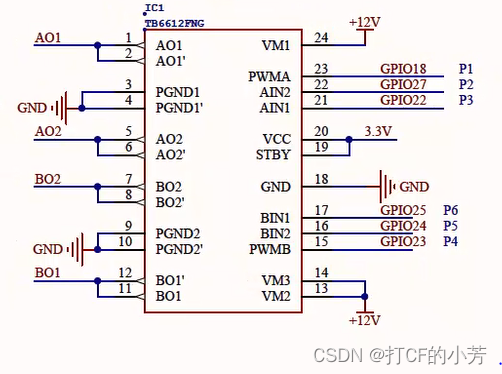
- PWMA and PWMB control plus ++ duty cycle control enable AB
- AIN1 AIN2 control enable A corresponding interface output input ----- high and low level
- BIN1 BIN2 control enable B
- Control the steering of the trolley through 4 input and output interfaces----refer to the L298N motor module
- Enable A to control the left wheel
- Enable B to control the right wheel
Want to adjust the speed --- first set PWMA and PWMB ----- frequency
In setting the corresponding duty cycle of AB - high level duty cycle - 0~100
Wiring diagram:

Basic Motion Code - Autonomous Driving
#!/home/pi/server
# coding=utf-8
#小车基本运动
#GPIO±àÂ뷽ʽΪBOARD£¡£¡
import RPi.GPIO as GPIO
import time
#设置使能AB通道!!!
PWMA = 18
AIN1 = 22
AIN2 = 27
PWMB = 23
BIN1 = 25
BIN2 = 24
#前进函数
def t_up(speed,t_time): #速度通过占空比控制0--100;加上运动时间
L_Motor.ChangeDutyCycle(speed)#AIN左边轮子
GPIO.output(AIN2,False)#AIN2####1高2低----前进
GPIO.output(AIN1,True) #AIN1
R_Motor.ChangeDutyCycle(speed)#BIN控制右边轮子转动
GPIO.output(BIN2,False)#BIN2#3高4低正传
GPIO.output(BIN1,True) #BIN1
time.sleep(t_time)
#停止
def t_stop(t_time):
L_Motor.ChangeDutyCycle(0) #占空比为零
GPIO.output(AIN2,False)#AIN2 #各个电机为低电平
GPIO.output(AIN1,False) #AIN1
R_Motor.ChangeDutyCycle(0)
GPIO.output(BIN2,False)#BIN2
GPIO.output(BIN1,False) #BIN1
time.sleep(t_time)
def t_down(speed,t_time): #后退
L_Motor.ChangeDutyCycle(speed)
GPIO.output(AIN2,True)#AIN2
GPIO.output(AIN1,False) #AIN1
R_Motor.ChangeDutyCycle(speed)
GPIO.output(BIN2,True)#BIN2
GPIO.output(BIN1,False) #BIN1
time.sleep(t_time)
def t_left(speed,t_time):#左转########左边两个轮子后转。,右边前传
L_Motor.ChangeDutyCycle(speed)
GPIO.output(AIN2,True)#AIN2 #1低2高反转
GPIO.output(AIN1,False) #AIN1
R_Motor.ChangeDutyCycle(speed)#右边3高4低正转
GPIO.output(BIN2,False)#BIN2
GPIO.output(BIN1,True) #BIN1
time.sleep(t_time)
def t_right(speed,t_time):
L_Motor.ChangeDutyCycle(speed)##设置左边PWMA使能A的占空比
GPIO.output(AIN2,False)#AIN2
GPIO.output(AIN1,True) #AIN1
#1/0 True/False GPIO.HIGH控制高低电平 ----转向
R_Motor.ChangeDutyCycle(speed)
GPIO.output(BIN2,True)#BIN2
GPIO.output(BIN1,False) #BIN1
time.sleep(t_time)
GPIO.setwarnings(False)
GPIO.setmode(GPIO.BCM) #设置通道
GPIO.setup(AIN2,GPIO.OUT)
GPIO.setup(AIN1,GPIO.OUT)
GPIO.setup(PWMA,GPIO.OUT)
GPIO.setup(BIN1,GPIO.OUT)
GPIO.setup(BIN2,GPIO.OUT)
GPIO.setup(PWMB,GPIO.OUT)
L_Motor= GPIO.PWM(PWMA,100)#设置PWMA输出频率为100#左边PWMA使能
L_Motor.start(0)#使得频率一定,开始PWM
R_Motor = GPIO.PWM(PWMB,100)#右边PWMB使能频率
R_Motor.start(0)
try:
while True:
t_up(50,3)#前进速度50dc,三秒钟
t_down(50,3)
t_left(50,3)
t_right(50,3)
t_stop(3)#停止三秒
except KeyboardInterrupt:
GPIO.cleanup()
2. Control basic movement
#通过input()函数来进行输入操作,电脑按键控制小车前进
#!/home/pi/server
# coding=utf-8
#小车基本运动
import RPi.GPIO as GPIO
import time
#设置使能AB通道!!!
PWMA = 18
AIN1 = 22
AIN2 = 27
PWMB = 23
BIN1 = 25
BIN2 = 24
#前进函数
def t_up(speed,t_time): #速度通过占空比控制0--100;加上运动时间
L_Motor.ChangeDutyCycle(speed)#AIN左边轮子
GPIO.output(AIN2,False)#AIN2####1高2低----前进
GPIO.output(AIN1,True) #AIN1
R_Motor.ChangeDutyCycle(speed)#BIN控制右边轮子转动
GPIO.output(BIN2,False)#BIN2#3高4低正传
GPIO.output(BIN1,True) #BIN1
time.sleep(t_time)
#停止
def t_stop(t_time):
L_Motor.ChangeDutyCycle(0) #占空比为零
GPIO.output(AIN2,False)#AIN2 #各个电机为低电平
GPIO.output(AIN1,False) #AIN1
R_Motor.ChangeDutyCycle(0)
GPIO.output(BIN2,False)#BIN2
GPIO.output(BIN1,False) #BIN1
time.sleep(t_time)
def t_down(speed,t_time): #后退
L_Motor.ChangeDutyCycle(speed)
GPIO.output(AIN2,True)#AIN2
GPIO.output(AIN1,False) #AIN1
R_Motor.ChangeDutyCycle(speed)
GPIO.output(BIN2,True)#BIN2
GPIO.output(BIN1,False) #BIN1
time.sleep(t_time)
def t_left(speed,t_time):#左转########左边两个轮子后转。,右边前传
L_Motor.ChangeDutyCycle(speed)
GPIO.output(AIN2,True)#AIN2 #1低2高反转
GPIO.output(AIN1,False) #AIN1
R_Motor.ChangeDutyCycle(speed)#右边3高4低正转
GPIO.output(BIN2,False)#BIN2
GPIO.output(BIN1,True) #BIN1
time.sleep(t_time)
def t_right(speed,t_time):
L_Motor.ChangeDutyCycle(speed)##设置左边PWMA使能A的占空比
GPIO.output(AIN2,False)#AIN2
GPIO.output(AIN1,True) #AIN1
#1/0 True/False GPIO.HIGH控制高低电平 ----转向
R_Motor.ChangeDutyCycle(speed)
GPIO.output(BIN2,True)#BIN2
GPIO.output(BIN1,False) #BIN1
time.sleep(t_time)
GPIO.setwarnings(False)
GPIO.setmode(GPIO.BCM)
GPIO.setup(AIN2,GPIO.OUT)
GPIO.setup(AIN1,GPIO.OUT)
GPIO.setup(PWMA,GPIO.OUT)
GPIO.setup(BIN1,GPIO.OUT)
GPIO.setup(BIN2,GPIO.OUT)
GPIO.setup(PWMB,GPIO.OUT)
L_Motor= GPIO.PWM(PWMA,100)#设置PWMA输出频率为100#左边PWMA使能
L_Motor.start(0)#使得频率一定,开始PWM
R_Motor = GPIO.PWM(PWMB,100)#右边PWMB使能频率
R_Motor.start(0)
try:
while True:
res = input(" 输入: ")
if res =="w"or res=="W":
t_up(50,1.5)
elif res =="s" or "S": #输入后退
t_down(50,1.5)
if res == "a" or "A":
t_left(50,1)
if res == "r" or "R":
t_right(50,1)
if res == "p" or "P":
t_stop(2)
"""
t_up(50,3)#前进速度50,三秒钟
t_down(50,3)
t_left(50,3)
t_right(50,3)
t_stop(3)
#停止三秒"""
except KeyboardInterrupt:
GPIO.cleanup()