2021SC@SDUSC
ubuntu安装ros系统及遇到的问题总结
本次安装以ubuntu18.04安装ros melodic版本为例
一、在虚拟机ubuntu18.04系统
直接在官网上下载对应的镜像文件即可。
二、安装ros
具体流程在网站http://wiki.ros.org/melodic/Installation/Ubuntu,本文主要介绍安装过程中遇到的一系列问题以及解决方法。
1、添加source.list
设置你的电脑以从 packages.ros.org 接收软件。
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/source s.list.d/ros-latest.list'
2、添加公钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B
172B4F42ED6FBAB17C654
3、安装
sudo apt update
这里可能会报错:
E: 文件 list 第 1 行的记录格式有误 /etc/apt/sources.list.d/ros-latest.list (Comp site:blog.csdn.net
原因:刚才设置源不稳定
解决:
换了中科大的源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
参考:https://blog.csdn.net/sinat_37957340/article/details/103358765
4、安装ros工具包
在 ROS 中有很多不同的库和工具。提供了四种默认选项供你开始。你也可以单独 安装 ROS 的软件包。
桌面完整版(推荐):
包含 ROS、rqt、rviz、机器人通用库、2D/3D 模拟器、导航以及 2D/3D 感知包。
sudo apt install ros-melodic-desktop-full
桌面版:
包含 ROS,rqt,rviz 和机器人通用库
sudo apt install ros-melodic-desktop
ROS-基础包:
包含 ROS 包,构建和通信库。没有图形界面工具。
sudo apt install ros-melodic-ros-base
单独的包:
你也可以安装某个指定的 ROS 软件包(使用软件包名称替换掉下面的 PACKAGE): sudo apt install ros-melodic-PACKAGE
如: sudo apt install ros-melodic-slam-gmapping
要查找可用软件包,请运行: apt search ros-melodi
- 就用第一种就完事了
5、设置环境
将 ROS 环境变量自动添加到新 bash 会话会很方便:
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
6、安装用于构建ROS包的工具
sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential
sudo apt install python-rosdep
7、初始化rosdep
sudo rosdep init
rosdep update
问题:可能会出现超时等一系列问题
原因:各种问题基本上都是一个原因:源的网站被墙了
解决:
添加github的资源代理https://ghproxy.com/
修改相关的文件:
/usr/lib/python2.7/dist-packages/rosdep2/sources_list.py
在download_rosdep_data函数里添加:
url="https://ghproxy.com/"+url
同样修改下面的文件:
/usr/lib/python2.7/dist-packages/rosdistro/__init__.py
/usr/lib/python2.7/dist-packages/rosdep2/gbpdistro_support.py 36行
/usr/lib/python2.7/dist-packages/rosdep2/sources_list.py 72行
/usr/lib/python2.7/dist-packages/rosdep2/rep3.py 39行
/usr/lib/python2.7/dist-packages/rosdistro/manifest_provider/github.py 68行 119行
均可通过在地址前添加https://ghproxy.com/前缀来应用代理服务。
在文件*/usr/lib/python2.7/dist-packages/rosdep2/gbpdistro_support.py* 第204行添加如下代码gbpdistro_url = “https://ghproxy.com/” + gbpdistro_url
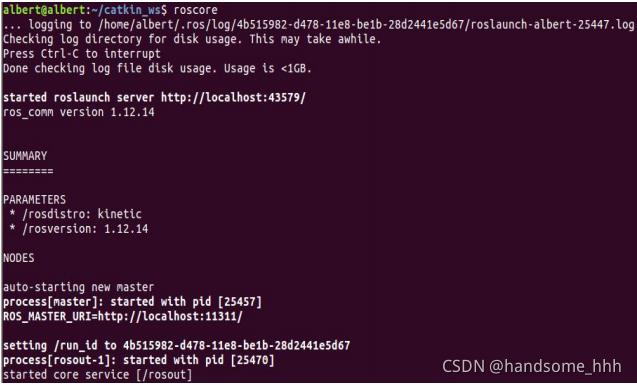
8、roscore
打开终端 输入 roscore 出现如下图,即安装成功:
三、总结:
基本上所有的问题都是网络、源的问题,下载失败就换个好点的网,改个靠谱的国内的源