robô industrial
1. Preencha os espaços em branco
1. De acordo com a forma de coordenada, o robô pode ser dividido em tipo de coordenada retangular, tipo de coordenada cilíndrica e tipo de coordenada esférica
E tipo de coordenada conjunta quatro tipos básicos.
2. Como um robô, geralmente consiste em três partes, ou seja, o sistema de controle, sistema de sensor e sistema mecânico.
3. Os principais parâmetros técnicos do robô geralmente incluem graus de liberdade, precisão de posicionamento, faixa de trabalho, precisão de posicionamento repetido, resolução, capacidade de carga e velocidade máxima.
4. O grau de liberdade refere-se ao número de movimentos de eixo de coordenadas independentes do robô, excluindo os graus de liberdade de abertura e fechamento do efetuador final.
5. A resolução do robô é dividida em resolução de programação e resolução de controle, referidas coletivamente como resolução do sistema.
6. A precisão de posicionamento repetido é um dado estatístico sobre a precisão.
7. De acordo com o princípio da geração de vácuo, as ventosas a vácuo podem ser divididas em ventosas a vácuo, ventosas de pressão negativa de fluxo de ar e ventosas a vácuo.
Existem três tipos básicos, como ventosas de compressão e de pressão negativa.
8. Os métodos de geração da trajetória de movimento do robô incluem movimento de reprodução de ensino, movimento de espaço articular, movimento linear de espaço e movimento de curva espacial.
9. Os principais indicadores de desempenho dos sensores do robô incluem sensibilidade, linearidade, faixa de medição, repetibilidade, precisão, resolução, tempo de resposta e capacidade anti-interferência.
10. O grau de liberdade refere-se ao número de movimentos de eixos de coordenadas independentes que o robô possui.
11. A precisão de posicionamento repetitivo do robô refere-se à dispersão de sua posição quando o robô repete seu movimento várias vezes continuamente sob o mesmo ambiente, a mesma condição, a mesma ação alvo e o mesmo comando.
12. Os métodos de condução do robô incluem principalmente acionamento hidráulico, acionamento pneumático e acionamento elétrico.
13. Os sensores comumente usados em robôs que podem medir a velocidade de rotação incluem tacogeradores e codificadores incrementais.
14. De acordo com seu modo de controle, o sistema de controle do robô pode ser dividido em modo de controle de força, trajetória
Modo de controle e modo de controle de ensino.
15. De acordo com a estrutura geométrica, os robôs são divididos em: robôs em série e robôs paralelos.
2. Questões de Múltipla Escolha (Escolha a melhor resposta entre as quatro alternativas para cada pergunta.)
1. A faixa de trabalho refere-se ao conjunto de pontos que o robô B ou o centro do pulso pode alcançar.
A Manipulador B Extremidade do braço C Braço D Parte móvel.
2. A precisão do robô depende principalmente de C, erro do algoritmo de controle e erro do sistema de resolução.
A Erro de transmissão B Folga na junta C Erro mecânico D Flexibilidade do mecanismo de articulação
3. O rolamento pode realizar um movimento de rotação desobstruído de 360° da junta, geralmente marcado com A.
ARBWCBDL
4. O pulso do tipo RRR é um pulso com grau C de liberdade.
A 1 B 2 C 3 D 4
5. As ventosas a vácuo exigem que a superfície da peça de trabalho esteja D, seca e limpa e com boa estanqueidade ao ar.
A Áspero B Acidentado C Ligeiramente elevado D Suave Suave
6. A transmissão por correia síncrona pertence à transmissão B, que é adequada para uso entre o motor e o redutor de relação de alta velocidade.
A alta inércia B baixa inércia C alta relação de velocidade D alto torque
7. Os sensores externos do robô não incluem o sensor D.
A força ou momento B proximidade C toque D posição
8. A função principal da pinça é agarrar a peça de trabalho, segurar a peça de trabalho e a peça de trabalho C.
A fixe B posição C solte D toque.
9. A precisão do robô depende principalmente de C, erro do algoritmo de controle e erro do sistema de resolução.
A Erro de transmissão B Folga na junta C Erro mecânico D Flexibilidade do mecanismo de articulação
10. Os métodos de controle do robô são divididos em controle de ponto e C.
A Controle ponto a ponto B Controle ponto a ponto C Controle de trilha contínua D Controle de posição arbitrária
11. A operação de soldagem do robô de soldagem inclui principalmente A.
A Soldagem a ponto e soldagem a arco B soldagem intermitente e soldagem contínua C soldagem plana e soldagem vertical D soldagem com proteção de gás e soldagem a arco de argônio
12. O caminho de trabalho é geralmente descrito pelo movimento do sistema de coordenadas D em relação ao sistema de coordenadas da peça de trabalho.
A garra B fixo C movimento D ferramenta
13. A desvantagem do drive harmônico é A.
A baixa rigidez torcional B pequena folga do acionamento C baixa inércia D alta precisão
14. Quem propôs os três princípios dos robôs. (D)
A Mori Masahiro B Joseph Ingeberg C Tomovich D Asimov
15. Os robôs mais importantes no exército de robôs contemporâneos são: (A)
A robô industrial B robô militar C robô de serviço D robô especial
16. Quais são as duas variáveis compostas pela postura da mão? (B)
A Posição e velocidade B Atitude e posição C Posição e estado de funcionamento D Atitude e velocidade
17. O sensor usado para detectar o tamanho e a direção do movimento relativo entre as superfícies de contato dos objetos é: C
A Sensor de proximidade B Sensor de toque C Sensor de deslizamento D Sensor de pressão
18. O controle ensino-playback é um método de programação online, e seu maior problema é: B
A. A intensidade de trabalho do operador é alta. B. Ocupa o tempo de produção. C. A segurança do operador. D. É fácil produzir resíduos.
19. Qual dos seguintes países é chamado de "Reino dos Robôs"? C
A China B Reino Unido C Japão D EUA
3. Questões de verdadeiro ou falso (marque “√” para certo e “×” para errado)
1. A programação de ensino é usada em robôs de reprodução de ensino. (√)
2. A trajetória do robô geralmente se refere à trajetória do robô industrial durante o processo de movimento, ou seja, o deslocamento, velocidade e aceleração do ponto em movimento. (√)
3. O robô articulado é composto principalmente por uma coluna, um antebraço e um braço traseiro. ( × )
4. Até agora, o robô foi desenvolvido para a quarta geração. ( × )
5. O mandril magnético pode segurar peças feitas de todos os materiais metálicos. ( × )
6. O nome do redutor harmônico vem do fato de que o deslocamento radial de qualquer ponto na coroa da roda rígida é semelhante à mudança da forma de onda do cosseno. N ( × )
8. Uma ponte composta por extensômetros de resistência pode formar um sensor para medição de peso. S (√)
9. O telêmetro a laser pode detectar o peso de materiais a granel. S (√)
10. O manipulador também pode ser chamado de robô. S (√)
4. Perguntas de resposta curta
1. Quantos tipos de pulsos robóticos existem? Descreva cada estrutura do punho. Resposta: O braço do robô pode ser dividido em tipo de braço único de acordo com a forma estrutural, tipo de braço duplo e tipo de suspensão de acordo com a forma de movimento do braço, e o braço tem movimento linear. Tal como a expansão e contração do braço, o levantamento e o movimento lateral, o movimento rotativo, como a rotação esquerda e direita do braço, e o movimento composto, como a combinação de movimento linear e movimento rotativo. Uma combinação de 2 movimentos lineares e uma combinação de 2 movimentos rotativos. Mecanismo de movimento rotativo do braço, existem vários mecanismos para realizar o movimento rotativo do braço do robô. As lâminas comumente usadas são cilindros rotativos, mecanismos de rotação de engrenagens, acionamentos de roda dentada e mecanismos de ligação. Mecanismos de movimento de inclinação do braço geralmente usam óleo de pistão (ar) O cilindro e o mecanismo de ligação é usado para realizar o mecanismo de movimento composto do braço, e a maioria deles é usada para robôs de propósito especial com um grau fixo de movimento.
2. Quantos métodos de controle existem para robôs industriais? Existem vários métodos de controle para robôs industriais. De acordo com diferentes tarefas, eles são divididos principalmente em métodos de controle de ponto-posição, métodos de controle de trajetória contínua, métodos de controle de força (torque) e métodos de controle inteligente. responder:
1) Método de controle ponto a ponto (PTP)
A característica deste método de controle é que ele apenas controla a pose do efetor final do robô industrial em alguns pontos discretos especificados no espaço de trabalho. Durante o controle, o robô industrial só precisa realizar com rapidez e precisão o movimento entre pontos adjacentes, e não há previsão para a trajetória do movimento atingir o ponto alvo. Os principais indicadores técnicos deste método de controle são a precisão do posicionamento e o tempo necessário para o movimento.
2) Modo de controle de trajetória contínua (CP)
A característica deste método de controle é controlar continuamente a posição e a postura do efetuador final do robô industrial no espaço de trabalho, exigindo que ele se mova estritamente de acordo com a trajetória e velocidade pré-determinadas dentro de uma certa faixa de precisão, sendo que a velocidade é controlável, a trajetória é suave e o movimento é estável para concluir as tarefas de trabalho.
3) Método de controle de força (torque)
Ao concluir a montagem, pegar e colocar objetos, etc., além do posicionamento preciso, também é necessário o uso de força ou torque moderado para o trabalho. Neste momento, o método servo de força (torque) deve ser usado. O princípio de controle deste método é basicamente o mesmo que o princípio de servocontrole de posição, exceto que a entrada e o feedback não são sinais de posição, mas sinais de força (torque), então deve haver um sensor de força (torque) no sistema. Às vezes, as funções de detecção, como proximidade e deslizamento, também são usadas para controle adaptativo.
4) Método de controle inteligente
O controle inteligente do robô obtém o conhecimento do ambiente circundante por meio do sensor e toma as decisões correspondentes de acordo com sua própria base de conhecimento interna. Usando tecnologia de controle inteligente, o robô tem forte adaptabilidade e função de autoaprendizagem. O desenvolvimento da tecnologia de controle inteligente depende do rápido desenvolvimento da rede neural artificial, algoritmo genético, algoritmo genético, sistema especialista e outras inteligências artificiais nos últimos anos.
4. Quais são os sistemas de coordenadas de parâmetros do robô? Qual é o papel de cada sistema de coordenadas de parâmetros? Resposta: As formas de coordenadas dos robôs industriais incluem coordenadas retangulares, coordenadas cilíndricas, coordenadas esféricas, coordenadas de juntas e juntas planas.
1) Coordenadas cartesianas/coordenadas cartesianas/tipo pórtico (3P)
O robô consiste em três juntas lineares usadas para determinar a posição do efetuador final, geralmente com uma junta rotacional adicional usada para determinar a posição do efetuador final. O movimento deste robô nos eixos X, Y e Z é independente, e as equações de movimento podem ser processadas independentemente, e as equações são lineares, por isso é fácil de realizar por computador; pode ser suportado em ambas as extremidades, e para um determinado comprimento de estrutura, rigidez máxima: sua precisão e resolução de posição não mudam com o local de trabalho e é fácil obter alta precisão. No entanto, sua faixa de operação é pequena, e o braço estica na direção oposta ao encolher, o que dificulta o trabalho, além de ter uma pegada grande, baixa velocidade de movimento e vedação ruim.
2) Tipo de coordenada cilíndrica (R3P)
Os robôs de coordenadas cilíndricas usam duas juntas deslizantes e uma junta rotativa para determinar a posição do componente e uma junta rotativa adicional para determinar a postura do componente. Este tipo de robô pode girar um ângulo em torno do eixo central, a faixa de trabalho pode ser expandida e o cálculo é simples; a parte linear pode ser acionada por pressão hidráulica, que pode produzir uma grande potência; pode atingir a cavidade de a máquina. No entanto, o espaço alcançável de seu braço é limitado e não pode alcançar o espaço próximo à coluna ou próximo ao solo; a parte de acionamento linear é difícil de vedar e à prova de poeira; quando o braço traseiro está funcionando, a extremidade traseira do braço toque em outros objetos dentro do alcance de trabalho.
3) Tipo de coordenada esférica (2RP)
5. Quais são os tipos de garras humanas e quais são suas características?
Resposta: (1) Garra do manipulador: conte com o mecanismo de transmissão para agarrar a peça de trabalho;
(2) Mandril magnético: segure peças ferromagnéticas por sucção de campo magnético, exigindo que a superfície da peça esteja limpa, plana e seca para garantir adsorção confiável, não adequada para condições de alta temperatura;
(3) Ventosa a vácuo: use o princípio do vácuo para agarrar a peça de trabalho, e a superfície da peça de trabalho deve ser lisa, seca e limpa, e a estanqueidade do ar é melhor.
6. Quais são as duas formas básicas do codificador? Quais são suas características?
Duas formas básicas: incremental e absoluta
Incremental: É usado para medir a mudança de posição angular e posição linear, mas não pode registrar ou indicar diretamente o valor real da posição. Em todos os sistemas que utilizam encoders incrementais para rastreamento de posição, uma redefinição deve ser executada na inicialização do sistema.
Tipo absoluto: cada posição corresponde à única combinação certa de segmentos de arco opacos e transmissores de luz, e essa certa combinação tem características únicas. Por meio desse recurso, a posição exata da roda de código pode ser determinada a qualquer momento.
7. Quais são os tipos de drivers comumente usados em robôs industriais e uma breve descrição de suas características.
(1) A fonte de energia do acionamento elétrico é simples, a faixa de variação de velocidade é grande, a eficiência é alta, a inércia rotacional é pequena e a precisão de velocidade e posição é muito alta, mas eles estão principalmente conectados com o dispositivo de redução , e é difícil dirigir diretamente.
(2) A vantagem do acionamento hidráulico é que ele possui grande potência, pode economizar a engrenagem de redução e ser conectado diretamente à haste a ser acionada, possui uma estrutura compacta, boa rigidez, resposta rápida e o servo acionamento possui alta precisão . No entanto, é necessário adicionar uma fonte hidráulica, que é propensa a vazamento de líquido e não é adequada para ocasiões com requisitos de alta e baixa temperatura e limpeza. Portanto, os acionamentos hidráulicos são usados principalmente em sistemas de operação de robôs de super alta potência ou máquinas de construção robotizadas.
(3) A estrutura do acionamento pneumático é simples, limpa, sensível em ação e tem um efeito tampão. Mas também precisa adicionar uma fonte de pressão de ar e, em comparação com o acionamento hidráulico, a potência é menor, a rigidez é ruim, o ruído é alto e a velocidade não é fácil de controlar, por isso é usado principalmente para controle de ponto robôs com baixa precisão, mas requisitos de limpeza e à prova de explosão.
8. Quais são os sistemas de transmissão dos robôs industriais comumente usados?
Acionamentos por engrenagens, acionamentos sem-fim, acionamentos por parafuso esférico, acionamentos por correia dentada, acionamentos por corrente e acionamentos por engrenagens planetárias
9. Por que um sistema de transmissão (redução) geralmente é necessário em um sistema de robô?
Como o motor atual geralmente tem uma velocidade alta e um torque pequeno, é necessário reduzir a velocidade e aumentar o torque através do sistema de transmissão.
10. Quais são os sensores de distância e proximidade comumente usados em robôs? .
Sensor ultrassônico, laser, infravermelho, hall
11. De acordo com a classificação dos robôs, em quantas categorias os robôs podem ser divididos? Tente descrevê-lo brevemente.
1) Robôs industriais ou robôs industriais são utilizados na produção industrial e agrícola, principalmente na fabricação, soldagem, pintura, montagem, manuseio, inspeção, processamento de produtos agrícolas e outras indústrias.
2) Os robôs de exploração são usados para exploração espacial e oceânica, e também podem ser usados para exploração de superfície e subterrânea.
3) O robô de serviço é um tipo de robô semi-autônomo ou totalmente autônomo. O trabalho de serviço que ele realiza pode fazer com que os seres humanos vivam melhor e façam com que outros equipamentos, além da fabricação, funcionem melhor.
4) Os robôs militares são usados para fins militares, seja ofensivamente ou defensivamente.
12. O que é um robô de reprodução de ensino?
Resposta: Primeiro, o manipulador é conduzido por um humano e, em seguida, a operação é realizada com a ação de ensino, e o programa de operação de ensino, posição e outras informações são armazenados e, em seguida, o robô pode reproduzir essas ações.
13. Quais são as duas formas básicas do codificador? Quais são suas características?
Duas formas básicas: incremental e absoluta
Incremental: É usado para medir a mudança de posição angular e posição linear, mas não pode registrar ou indicar diretamente o valor real da posição. Em todos os sistemas que utilizam encoders incrementais para rastreamento de posição, uma redefinição deve ser executada na inicialização do sistema.
Tipo absoluto: cada posição corresponde à única combinação certa de segmentos de arco opacos e transmissores de luz, e essa certa combinação tem características únicas. Por meio desse recurso, a posição exata da roda de código pode ser determinada a qualquer momento.
5. Escreva uma instrução de controle de movimento que atenda aos requisitos de acordo com a trajetória de movimento fornecida na figura abaixo.
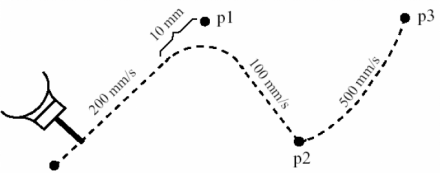
editar
Adicione anotações de imagem, não mais que 140 palavras (opcional)
6. Por favor, interprete os seguintes procedimentos e faça anotações.
1. Programa principal
PROC principal ()
rInitAll;
ENQUANTO É VERDADEIRO FAÇA
SE di1=1 ENTÃO
rMoveRotina;
rCasa;
FIM SE
WaitTime 0.3;
ESTOU NA CASA
FIM PROC
2、PROC rModPos()
!Ensine o programa de ponto-alvo
MoveL pPick,v10,fine,tGripper\WObj:=WobjCNV;
MoveL pPlaceBase,v10,fine,tGripper\WObj:=WobjBuffer;
MoveL pHome,v10,fine,tGripper;
FIM PROC
ENDMODULE
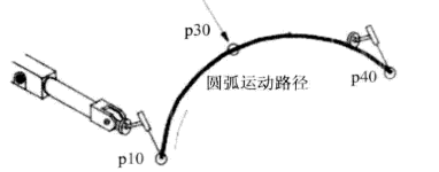
3. Entenda as instruções a seguir e desenhe o diagrama de trajetória do robô.
Rotina PROC1()
MoveL p10,v1000,fine,tool1\WOBj:=wobj1;
MoveC p30,p40,v1000,z1,tool1\WOBj:=wobj1;
FIM PROC
editar
Adicione anotações de imagem, não mais que 140 palavras (opcional)