Descrição breve
Para registrar alguns comandos comumente usados, consulte http://wiki.ros.org/ROS/Tutorials
catkin_make
Use catkin_make para criar um espaço de trabalho catkin
$ mkdir -p ~/catkin_ws/src
$ cd ~/catkin_ws/
$ catkin_make
$ source devel/setup.bash
O arquivo setup.bash pode ser substituído pelo arquivo correspondente ao bash usado por mim, eu mesmo uso .zsh
rospack find [package_name]
roscd [nome do local [/ subdir]]
rosls [nome do local [/ subdir]]
roscp [package_name] [file_to_copy_path] [copy_path]
catkin_create_pkg
Crie o pacote catkin no diretório src da área de trabalho catkin
catkin_create_pkg <package_name> [depend1] [depend2] [depend3]
Haverá um pakage.xmlarquivo no pacote que registra algumas informações sobre o pacote (autor, etc.) e dependências.Geralmente
, existem três dependências:
- <buildtool_depend>
- <build_depend>
- <exec_depend>
Também existe um CMakeList.txtarquivo no pacote criado
Depois de criar o pacote, você precisa voltar ao diretório raiz do espaço de trabalho catkin e executar o comando catkin_make.
Consulte http://wiki.ros.org/ROS/Tutorials/BuildingPackages
roscore
Deve ser executado antes de usar ROS roscore, e só pode haver um roscore
Rosnode
$ rosnode -h
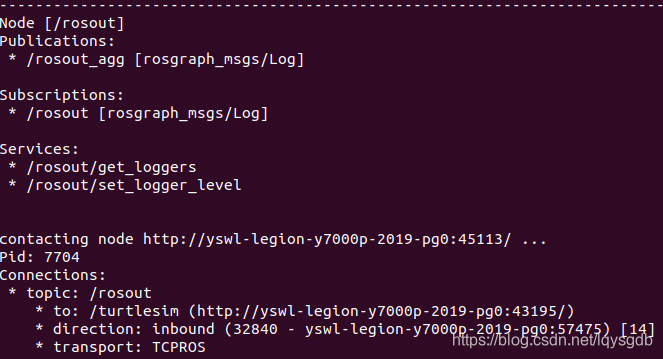
$ rosnode info /rosout
Rosrun
$ rosrun [package_name] [node_name]
$ rosrun turtlesim turtlesim_node __name:=my_turtle # 使用`__name:=`可以改node名字
$ rosrun rqt_graph rqt_graph # 显示节点和节点之间的话题
$ rqt_graph
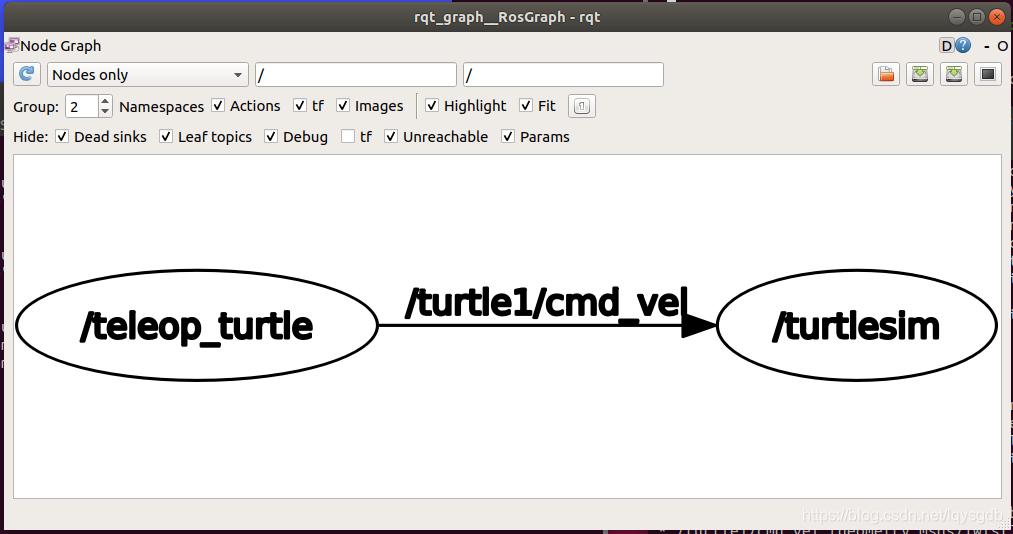
Ou digite rqt na linha de comando e selecione Plugins> Introspecção> Node Graph na barra de menu :
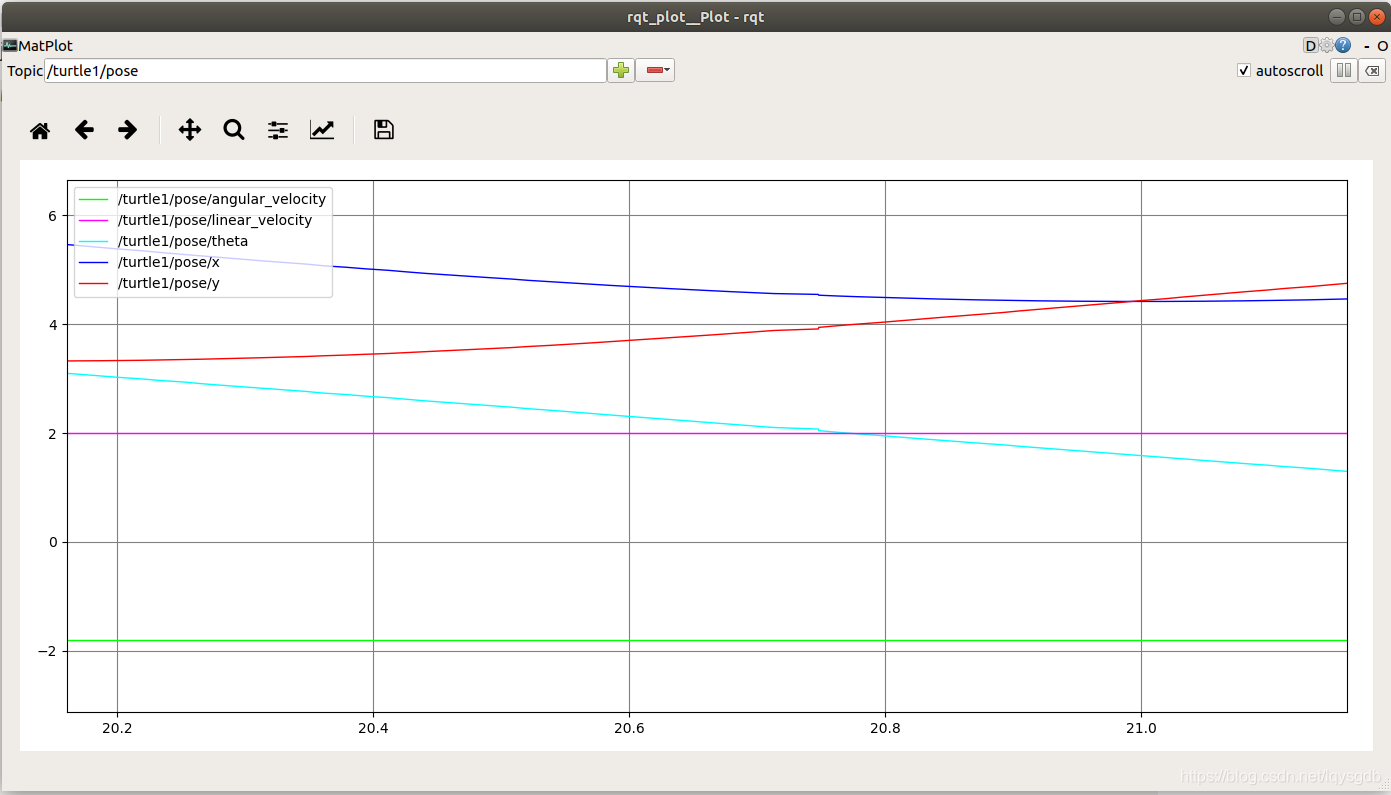
$ rosrun rqt_plot rqt_plot
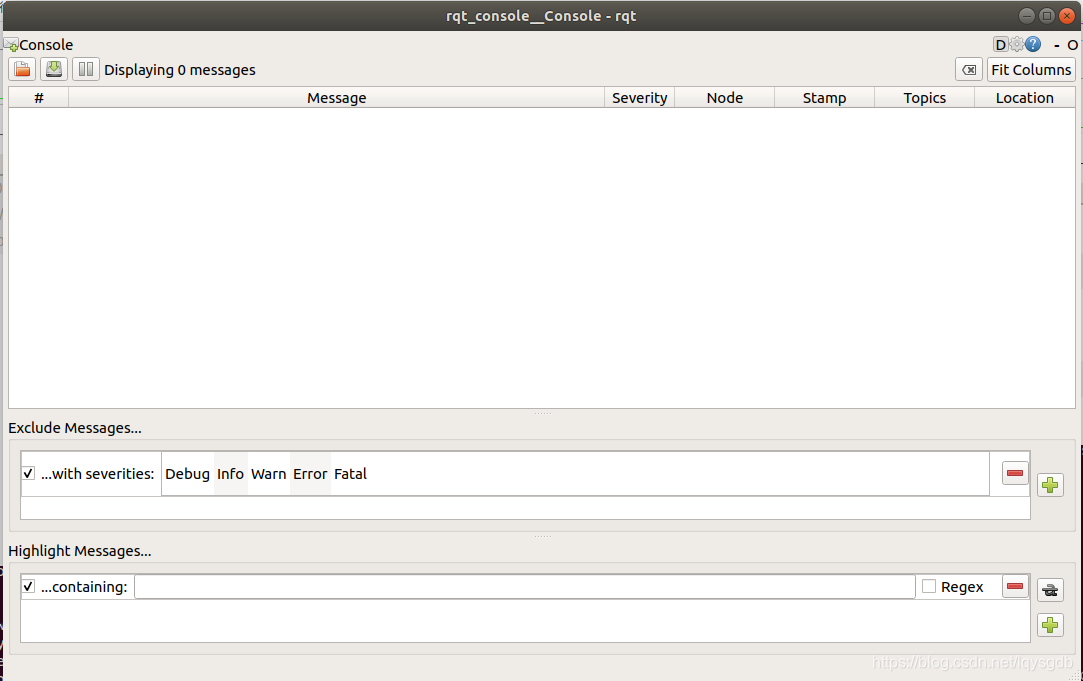
$ rosrun rqt_console rqt_console # 输出log日志控制台,display output from nodes
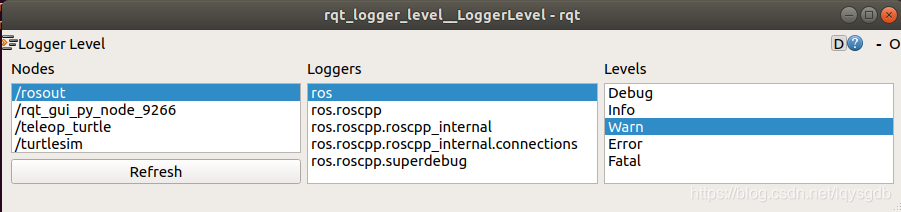
$ rosrun rqt_logger_level rqt_logger_level # fatal级别最高,debug级别最低
rostópico
$ rostopic -h

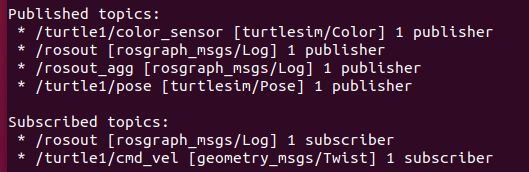
rostopic list -v #显示详细信息
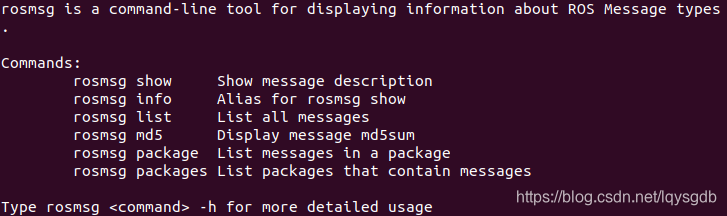
show rosmsg
$ rosmsg -h
$ rostopic type [topic_name] | rosmsg show
$ rostopic pub [topic] [msg_type] [args]
O parâmetro args está de acordo com os requisitos de YAML
Rosservice
$ rosservice -h
Rossrv
$ rosservice type [service_name] | rossrv show
rosparam
$ rosparam -h
roslaunch
$ roslaunch [package] [filename.launch]
referência
- http://wiki.ros.org/ROS/Tutorials/UsingRqtconsoleRoslaunch
- https://blog.csdn.net/qq_33444963/article/details/77893881
rosado
$ rosed [package_name] [filename] # 直接编辑包里的文件,不用进入路径里,默认使用vim
Rosbag
O parâmetro $ rosbag record # -O pode especificar o nome .bag,
$ rosbag info <seu bagfile>
$ rosbag play <seu bagfile> # -s parâmetro começa a tocar em uma determinada duração após o início, -r altera a taxa
Os dados registrados pelo rosbag podem não ser exatamente iguais aos originais