Seção do site oficial da bicicleta de equilíbrio de código aberto Wildfire
https://www.firebbs.cn/forum.php?mod=forumdisplay&fid=129&page=1
Referência
Não
Vídeo de referência (este líder de grupo é bom)
https://www.bilibili.com/video/BV1j7411z7uX
Plataforma de hardware
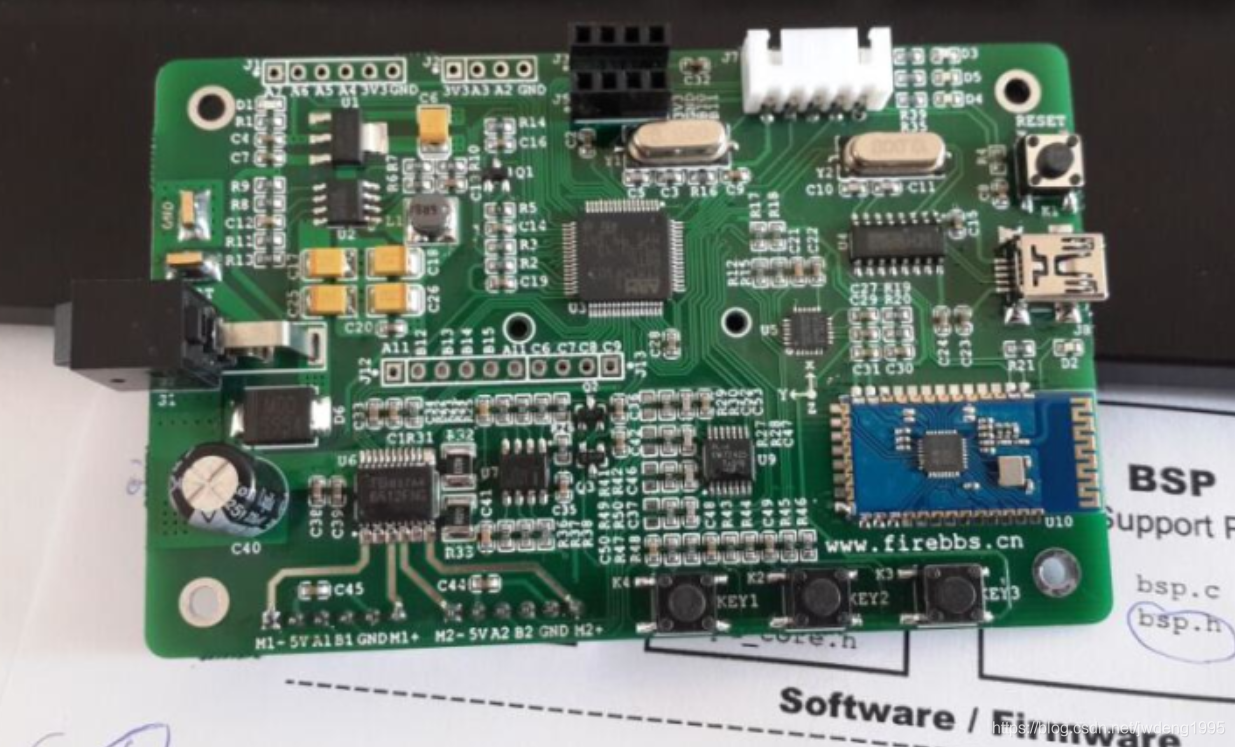
Plataforma de Desenvolvimento
KEIL5, STM32F103X controle principal, download do SWD para o programa (qualquer downloader serve, você pode fazer o download e pode fazer o download com uma porta serial)
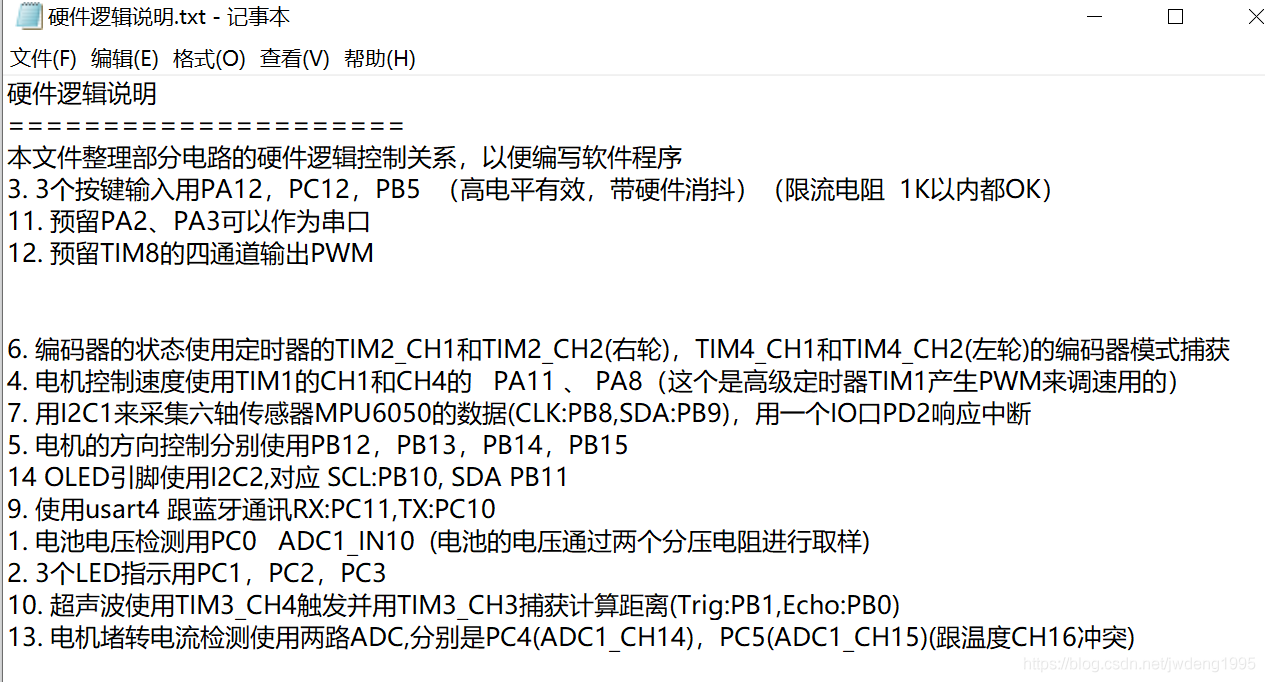
Os desenvolvimentos (1) 3, 11 e 12 são inúteis, os outros são todos usados, há um conflito na corrente do motor, então não vamos fazer isso
E o BUG de rotação descontrolada do motor ligado também foi resolvido
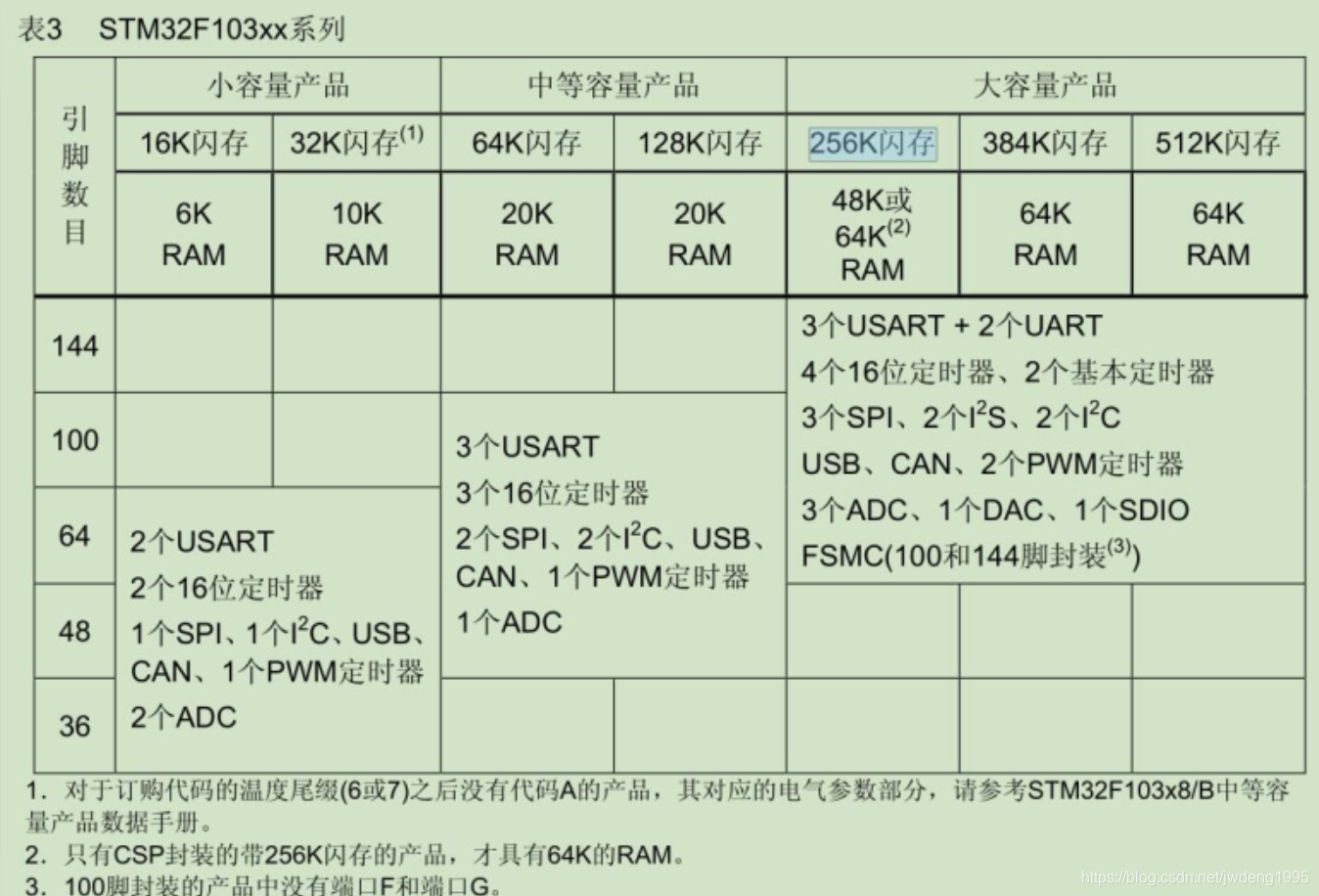
Além disso, o Bluetooth é modificado de volta para a porta serial 4, porque RC é 256K, que pertence a grande capacidade HD, e RBR8 é MD de capacidade média.
main.c ajustou a ordem aqui para resolver o bug do motor
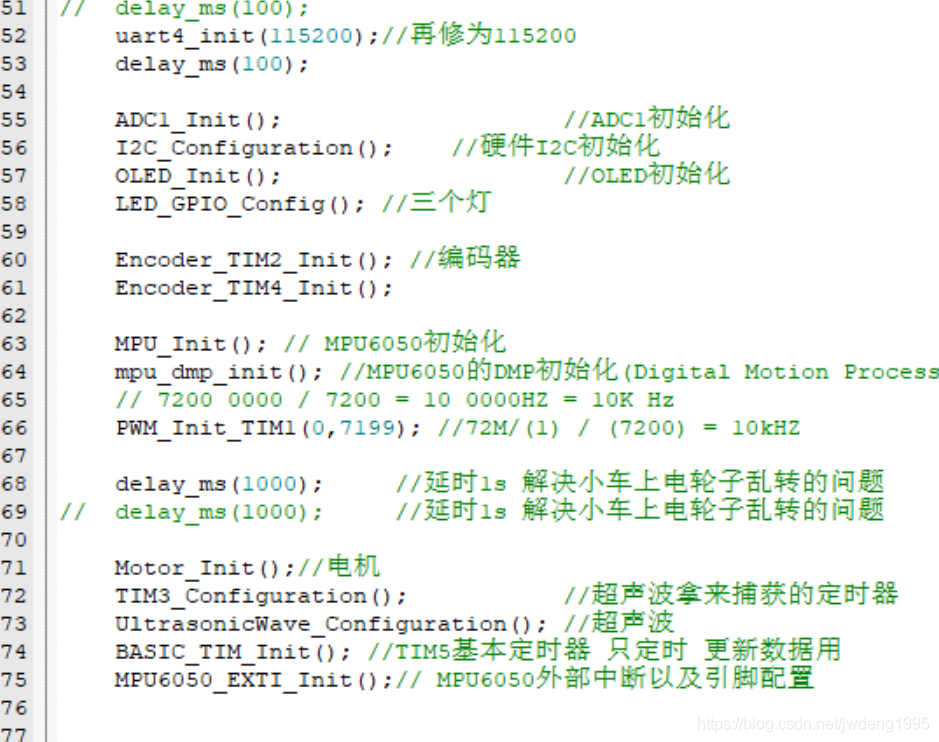
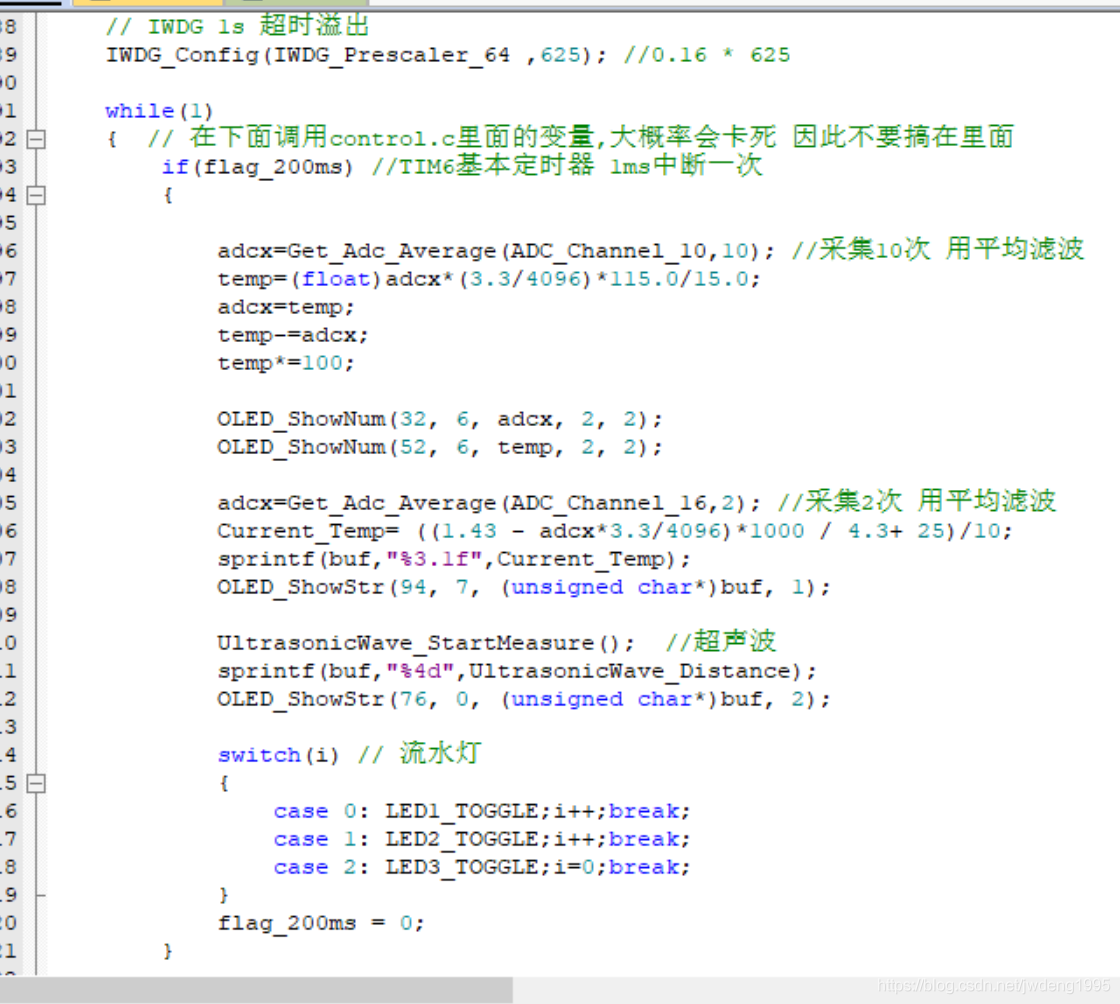
No lado do loop principal, o watchdog da janela é substituído por um watchdog independente, e a energia da bateria, a temperatura do chip, a distância ultrassônica e uma luz de água corrente são exibidos.
Lado do laço externo
Modificado o driver OLED, o driver original é difícil de usar, vá e veja o código
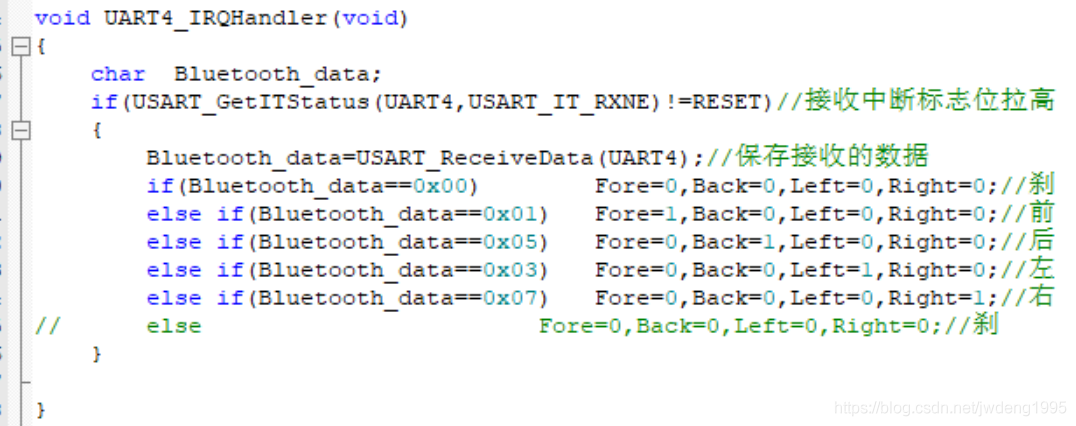
Porta serial 3 modificada de volta para 4, sem necessidade de remapeamento
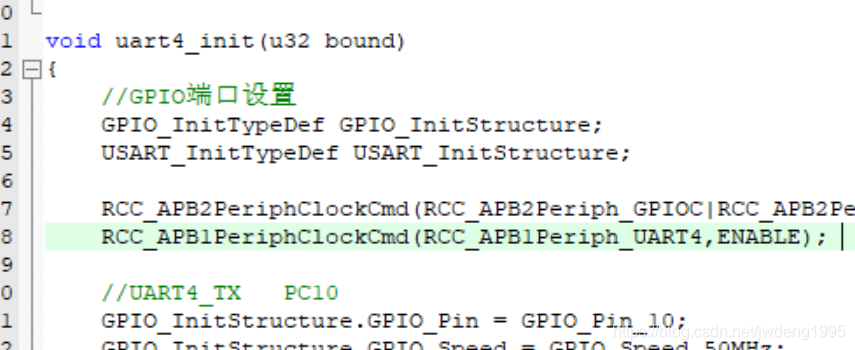
O lado de interrupção e envio abaixo também é alterado para uart4 em vez de usart3
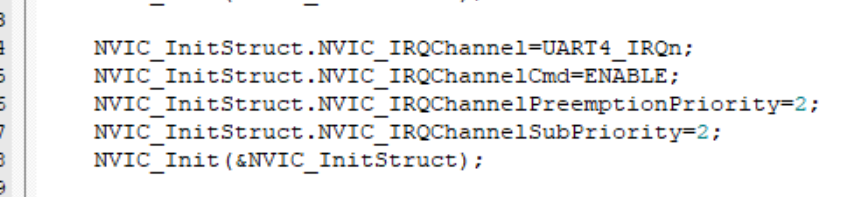
A prioridade de interrupção NVIC também foi alterada para uart4
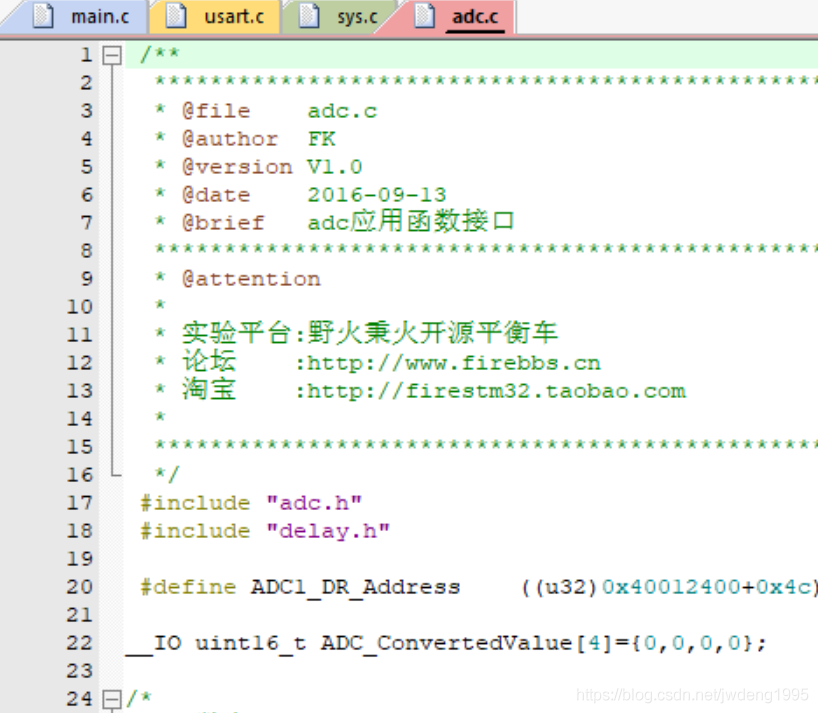
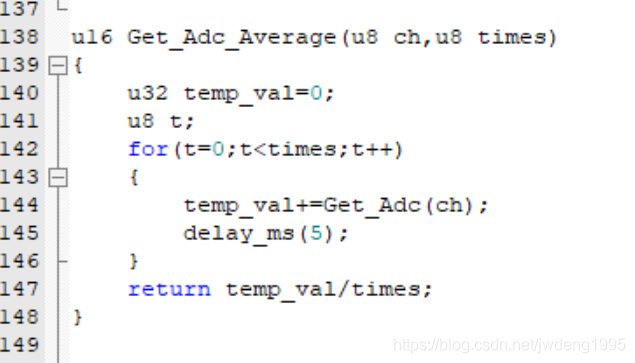
Adicionado ADC para coletar bateria e coletar código de temperatura para ver por si mesmo
Usando o método de filtragem média
Aumente o temporizador básico TIM6 como o tempo para atualizar os dados OLED, interrompa a cada 1 ms
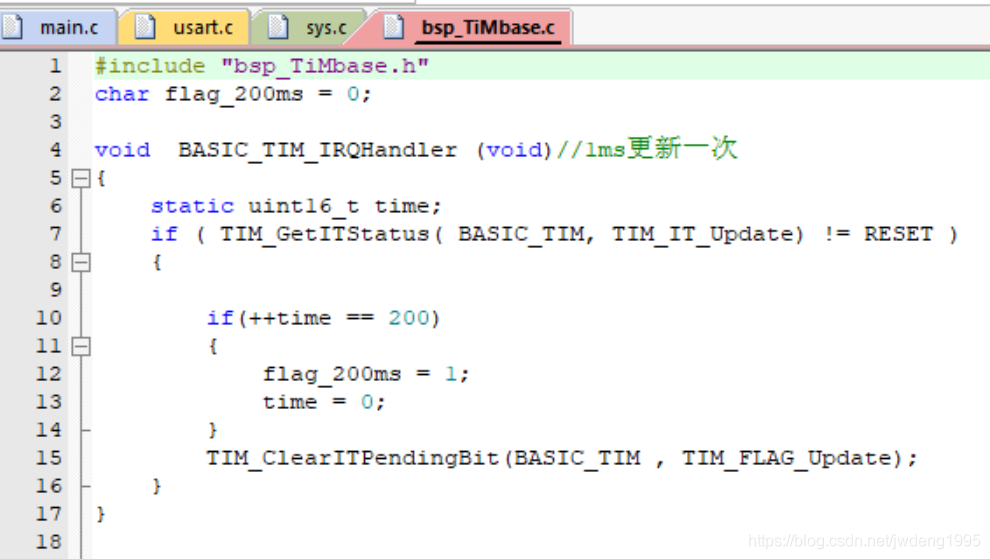
Adicionado TIM3 como a medição de tempo de recepção ultrassônica, o código é para você
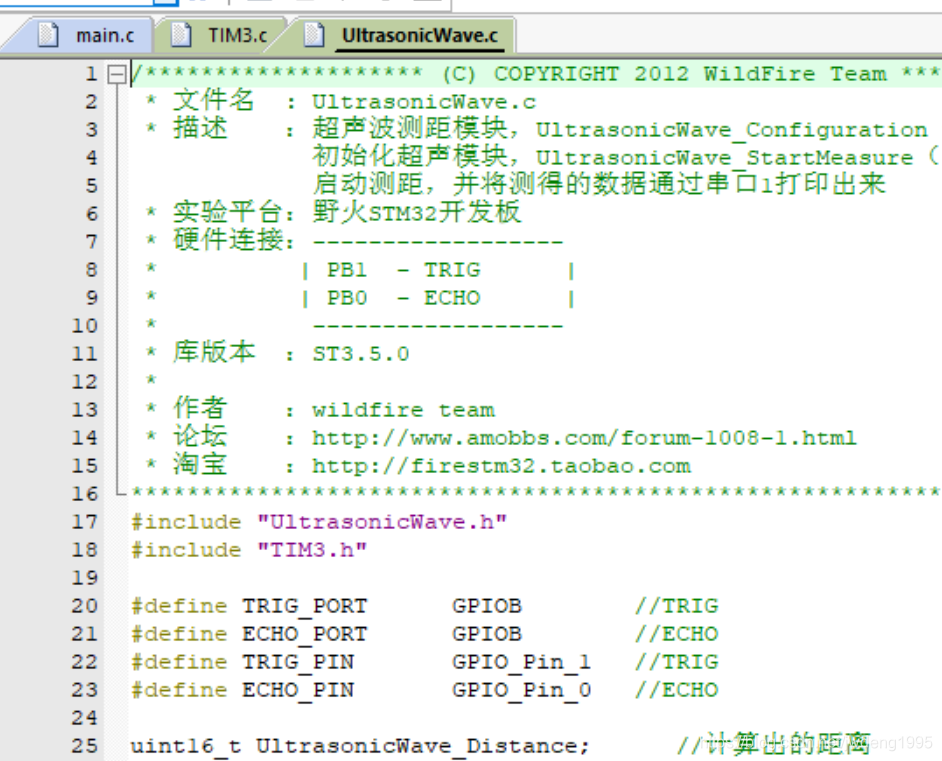
Adicionado alcance ultrassônico, veja o código por si mesmo
Não deve sobrar nada
Esta deve ser a última seção para atualizar o carro de equilíbrio de código aberto STM32 Wildfire
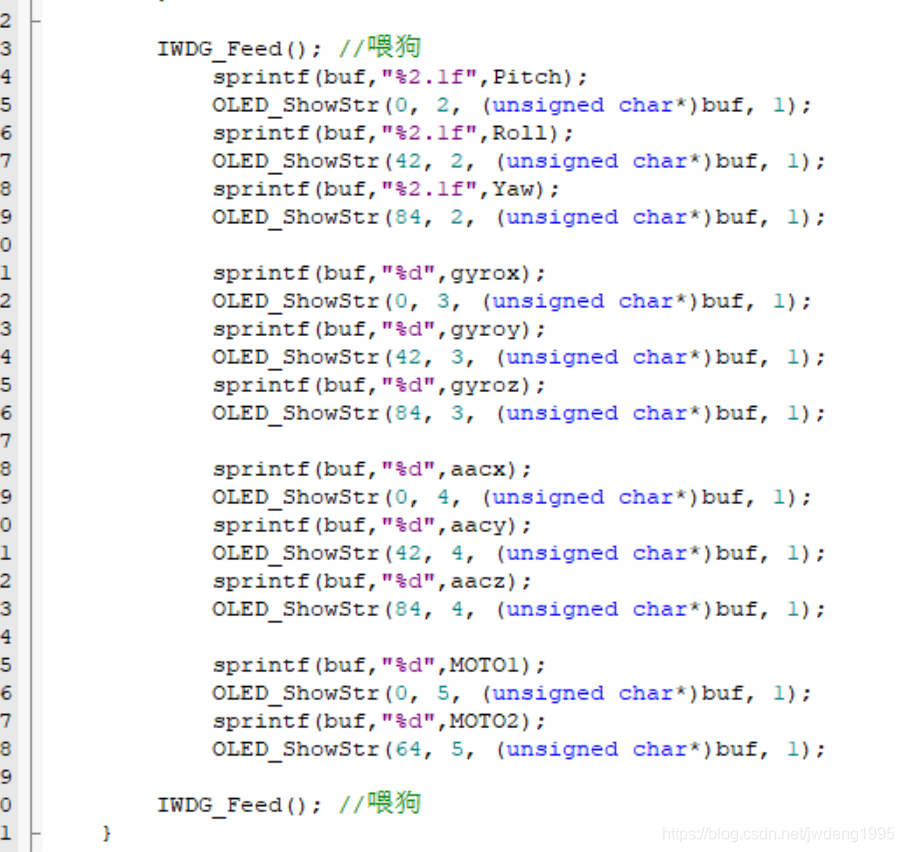
O conteúdo do último display OLED do carro
A primeira linha de distância ultrassônica
A segunda linha é o ângulo calculado pelo DMP, o ângulo de inclinação, o ângulo de rotação e o ângulo de rotação? De qualquer forma, a primeira é o ângulo de inclinação
A terceira linha é o giroscópio x, y, z
A aceleração da quarta linha x, y, z
A quinta linha é a saída PWM dos motores esquerdo e direito (às vezes mais de 5 dígitos, não sei por quê)
A sexta linha é a tensão atual da bateria e a temperatura do chip


Alguém deve perguntar por que eu não coloco OLED nele
Como o OLED que comprei custava mais de dez yuans, o anterior, que custava mais de vinte yuans, foi retirado para os alunos.
Você pode ver a posição do VCC e do GND do OLED. Se você conectá-lo da maneira errada, ele irá queimar o OLED. Se for sério, irá queimar a placa.
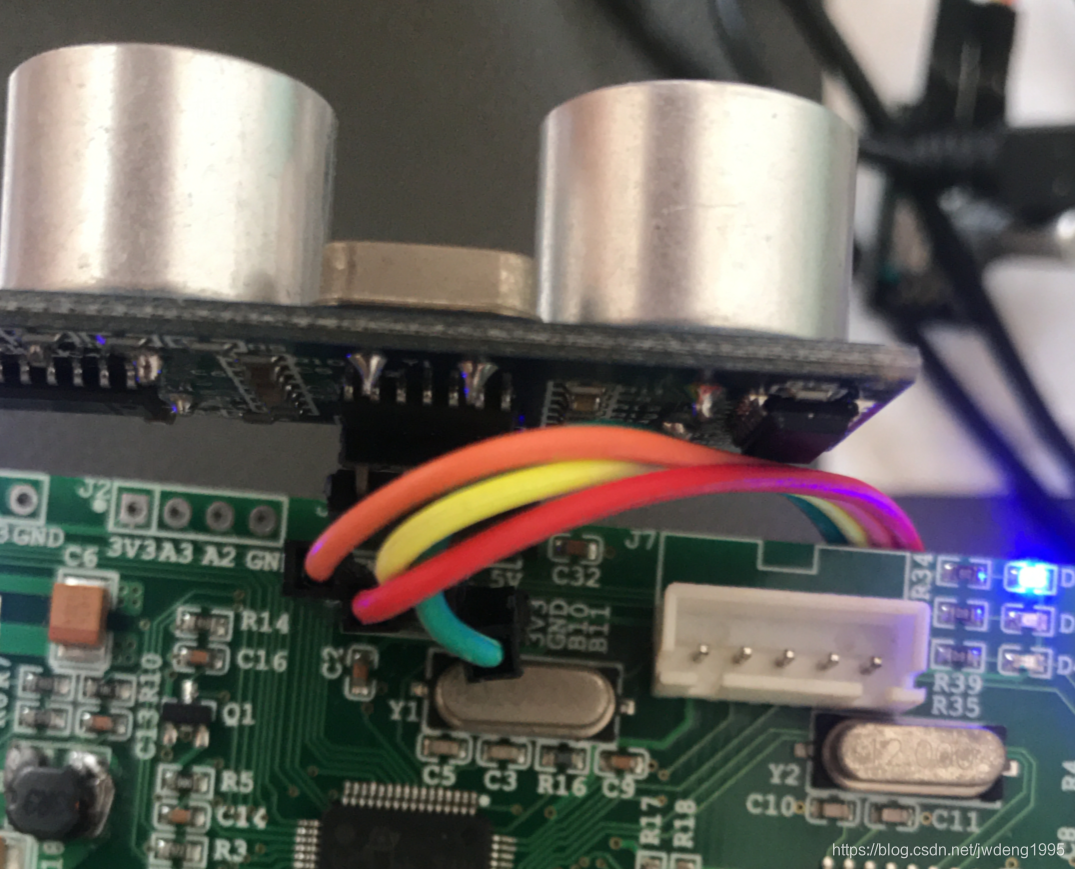
Finalmente coloque a foto no carro
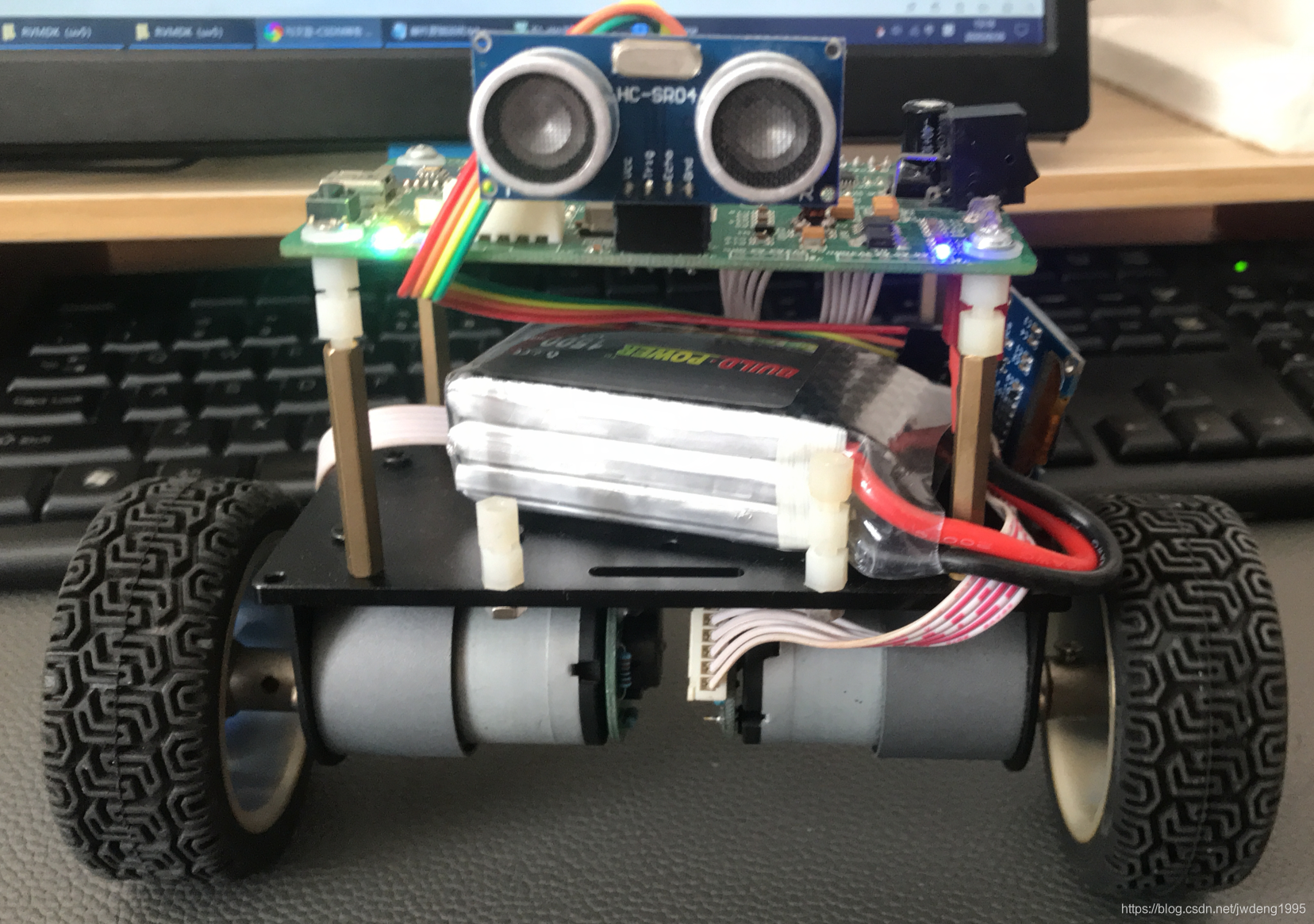
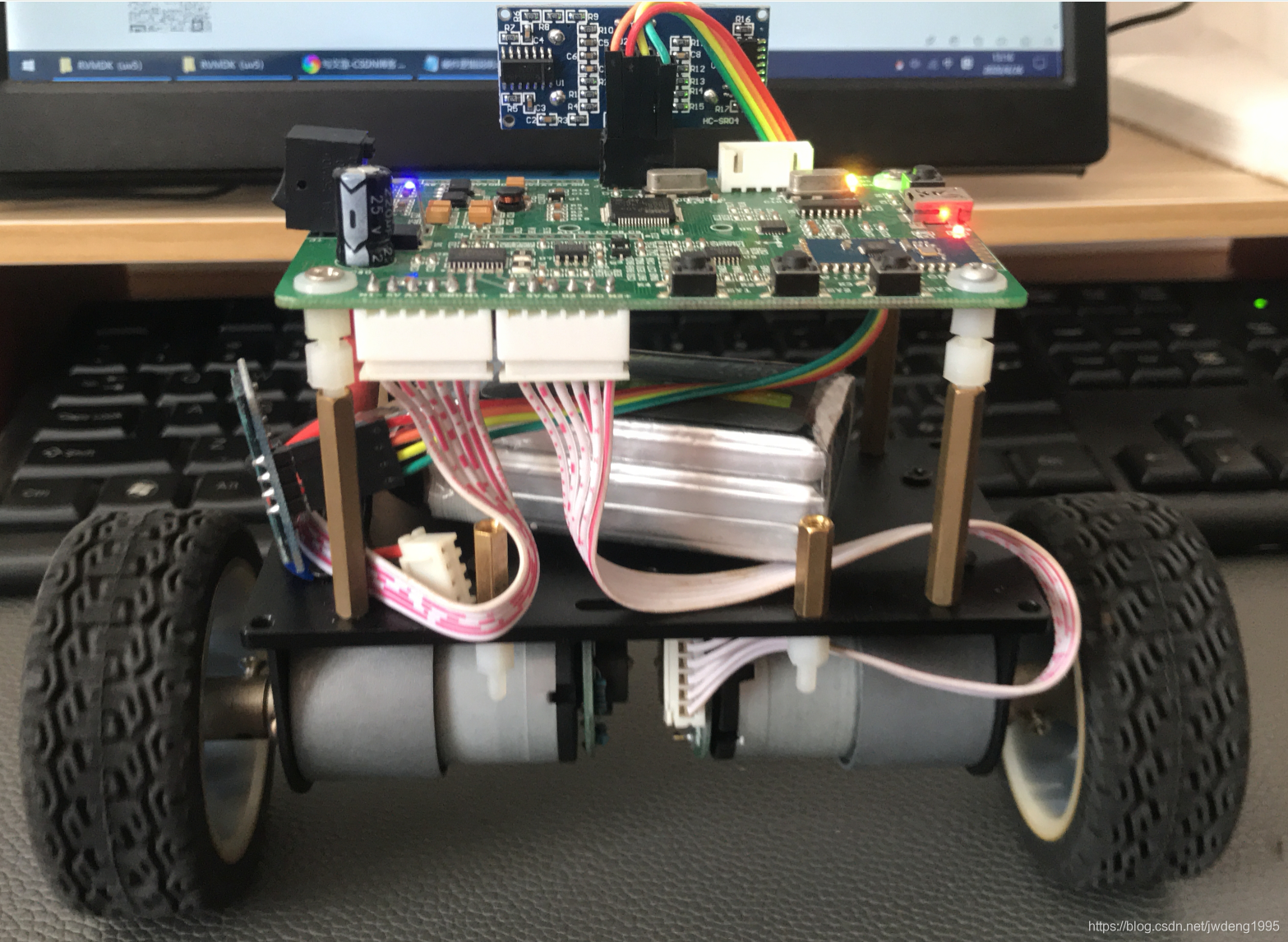

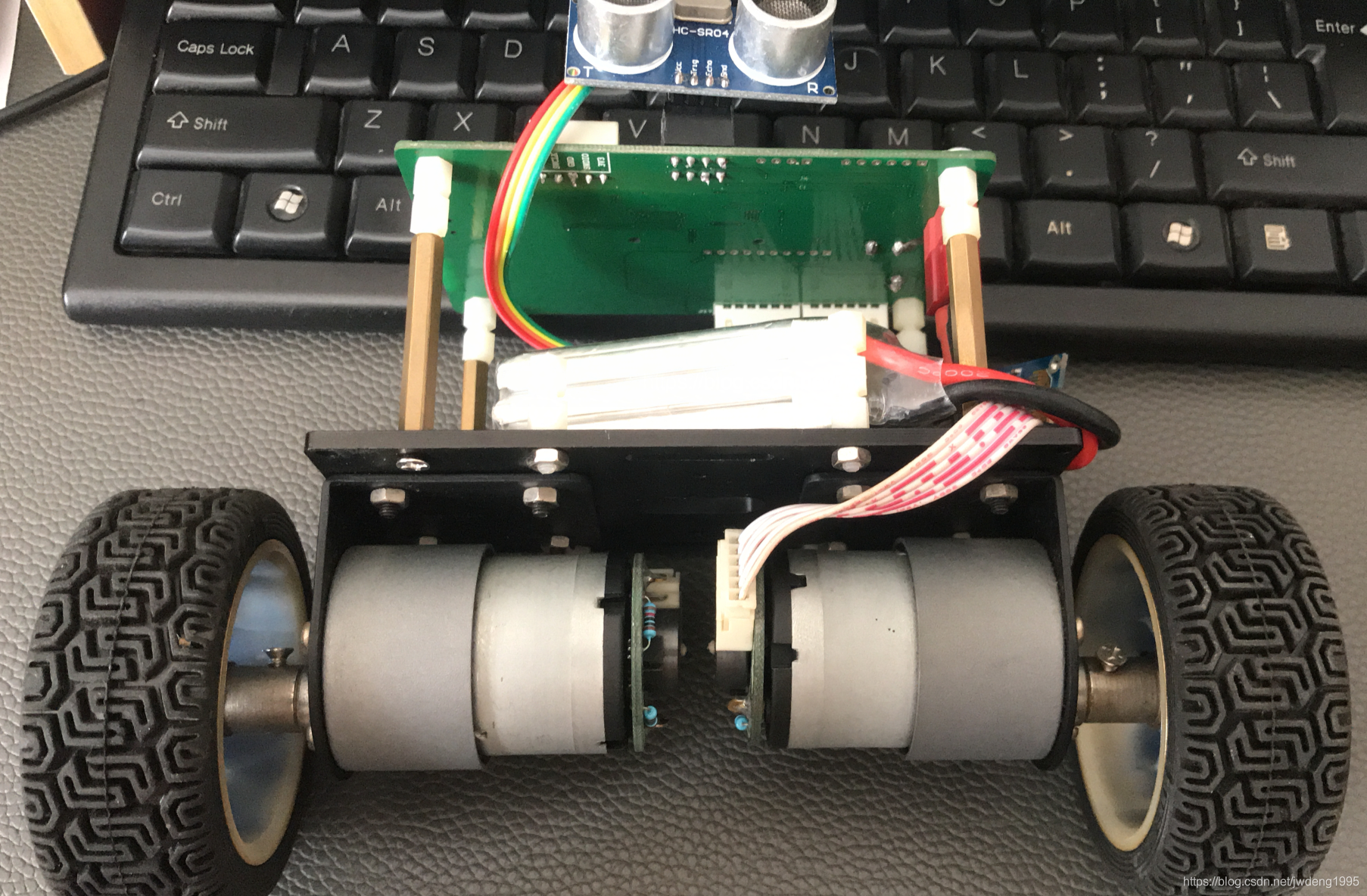
Este é o fim do carro de equilíbrio de código aberto STM32 Wildfire. Obrigado a todos
O código está abaixo
Link: https://pan.baidu.com/s/1CJLoFFaEcq-41F4Xc13z8w
Código de extração: g9ik
8,28
Adicionado Bluetooth controle do canto.
Nota:. Se o OLED e ultra-som não estão instalados, o programa não será executado (ele vai ser preso no lado de recepção de ultra-som) Neste momento, comentar os programas OLED e ultra-sônicas em main.c.
If você vê a água correndo A luz continua correndo, então tudo está normal
Link: https://pan.baidu.com/s/1x1cTE-UkZpmJn_yBrpd4rw
Código de extração: 3kn1