Execute todos os tipos de projetos de controle de movimento Gogo programados com QT (C ++), e aqueles que estiverem interessados podem conversar em particular.
# Controlador de movimento GTS - função de extensão de saída de comparação de posição bidimensional
Instrução 6 GT_2DCompareSetPrm
| Protótipo de instrução | GT_2DCompareSetPrm curto (chn curto, T2DComparePrm * pPrm); |
| Instruções | Defina os parâmetros de saída de comparação de posição bidimensional . |
| Tipo de instrução | Comando imediato, efetivo imediatamente após a chamada. |
| Parâmetro de instrução | Este comando tem 2 parâmetros no total. As informações detalhadas dos parâmetros são as seguintes. |
| chn | Número do canal 0: HSIO0 , número do canal 1: HSIO1 |
| pPrm | typedefstruct curto tempo; // largura de pulso do modo de pulso us short maxerr; // O erro máximo permitido da posição de comparação no local, faixa de valor [0,512), unidade: pulso limite curto; // Este parâmetro é definido como 0 } T2DComparePrm; Quando fonte = 0, a fonte de comparação é o planejador. Ao configurar o controlador, a "fonte de contagem de pulso" da seleção de "codificador" deve ser |
| Consulte a lista de valores de retorno do comando. | |
| Instruções relacionadas | não |
| Exemplo de comando | Exemplo 2 Definir dados de saída de comparação de posição |
Interface de entrada e saída de alta velocidade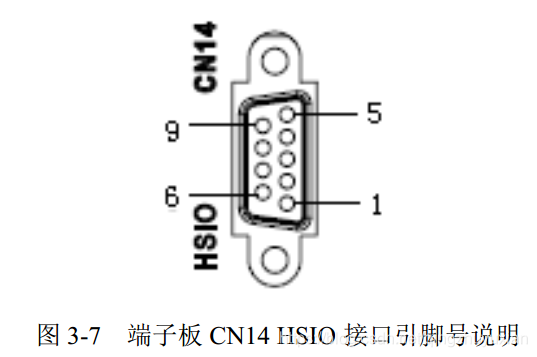
O controlador de movimento tem 2 módulos bidimensionais de comparação de posição, que podem ser usados para comparar a posição do encoder ou a posição do contador de pulso interno com a posição definida. Os dois módulos de comparação de posição bidimensional podem ser conectados a diferentes fontes de comparação (encoders ou contadores de pulso) .
Quando a posição do encoder ou a posição do contador de pulso interno atinge a posição definida, a porta IO de alta velocidade (HSIO) emite pulso ou nível reverso.
A instrução GT_2DCompareData é usada para transferir os dados de comparação para o controlador em um array . Esses dados de comparação são posições relativas ,
ou seja, o deslocamento relativo à posição do controlador quando GT_2DCompareStart é chamado . Suporta entrada de dados de direção não monotônica, mas o usuário precisa garantir
que os dados na matriz de posição possam alcançar a posição de disparo durante o movimento, caso contrário, o sistema ficará em espera pelo estado de disparo. O usuário também pode
definir o modo de comparação unidimensional. Neste momento, o módulo de comparação só compara os dados de posição no eixo de comparação Y.
Depois de comparar a posição inicial, quando o codificador externo ou ao comparar o contador de pulso interno atinge a posição definida, se a
saída do modo de impulso de pulso de largura fixa selecionada da interface de saída agora fornece um pulso, a largura de pulso pode ser definida para 1 ~ 32767us; se Selecione a
saída do modo de nível e inverta imediatamente o nível da interface de saída definida. Quando todas as posições de comparação são acionadas, a comparação de posições termina. Pressione o nível quadrado
quando a saída for, pode definir o nível inicial da saída do comparador, mas configurando uma saída de nível de pulso inicial.
Cada método inclui dois métodos, positivo e negativo. A direção positiva se refere à direção em que a posição planejada é um número positivo e a direção negativa se refere à direção em que a posição planejada é um número negativo. Por exemplo, "limite + retorno inicial à origem" inclui "positivo Limite + Retorno à origem "e" Limite negativo + Retorno à origem "; para cada método de retorno à origem, o deslocamento pode ser definido de forma que a posição final de parada do motor tenha um deslocamento da posição de origem; O método de origem pode não encontrar a origem devido a fatores como a distância de busca definida e parada inesperada do motor. A maioria das situações anormais pode ser identificada verificando o status da origem. Além disso, a função SmartHome permite que cada eixo retorne à origem de forma independente, sem afetar um ao outro, ou seja, vários eixos podem retornar à origem ao mesmo tempo.
Instrução 5 GT_2DComparePulse
| Protótipo de instrução | GT_2DComparePulse curto ( chn curto, nível curto, shortoutputType, tempo curto); |
| Instruções | Saída única de saída de comparação de posição bidimensional. |
| Tipo de instrução | Comando imediato, efetivo imediatamente após a chamada. |
| Parâmetro de instrução | Este comando tem 4 parâmetros no total. As informações detalhadas dos parâmetros são as seguintes. |
| chn | Número do canal 0: HSIO0, número do canal 1: HSIO1 |
| nível | O nível inicial no modo de nível de saída de comparação de posição (quando outputType = 0, o nível deve ser 1) nível = 0, o nível do pino de saída de comparação de posição é redefinido (retorna ao estado de nível após a inicialização) nível = 1, posição O nível do pino de saída de comparação é invertido (o oposto do estado do nível após a inicialização) |
| tipo de saída | Tipo de saída 0: modo de pulso , 1: modo de nível |
| Tempo | Tempo de pulso no modo de pulso, unidade: us |
| Valor de retorno do comando | Consulte a lista de valores de retorno do comando. |
| Instruções relacionadas | não |
| Exemplo de comando | Exemplo 1 Nível especificado de saída ou pulso |
Instrução 4 GT_2DCompareMode
| Protótipo de instrução | GT_2DCompareMode curto (chn curto, modo curto); |
| Instruções | Definir modo de saída de comparação de posição 2D |
| Tipo de instrução | Comando imediato, efetivo imediatamente após a chamada. |
| Parâmetro de instrução | Este comando tem 2 parâmetros no total. As informações detalhadas dos parâmetros são as seguintes. |
| chn | Número do canal 0: HSIO0 , número do canal 1: HSIO1 |
| modo | O modo de comparação de posição COMPARE2D_MODE_1D representa o modo de comparação unidimensional COMPARE2D_MODE_2D representa o modo de comparação bidimensional |
| Valor de retorno do comando | Consulte a lista de valores de retorno do comando. |
| Instruções relacionadas | não |
| Exemplo de comando | Exemplo 1 Nível especificado de saída ou pulso |
1. 开环(脉冲)控制模式
(1) 打开运动控制器, GT_Open;
(2) 复位运动控制器, GT_Reset。复位后默认的控制模式为“脉冲+方向”的脉冲控制方式。若不
是采用“脉冲+方向”的控制方式,则可调用 GT_StepPulse 修改;当需要还原为“脉冲+方向”
的控制方式时,则可调用 GT_StepDir 指令;
(3) 检查相关轴驱动器报警信号有没有连接。(一般若采用步进电机,可能没有驱动器报警信
号),若没有连接,则应该调用 GT_AlarmOff 指令,使驱动器报警无效,默认是有效的;
(4) 检查相关轴的限位开关,若没有连接,则需要通过调用 GT_LmtsOff,使限位无效,默认是
有效的;若有连接,则要检查触发电平是否设置正确,可通过 GT_LmtSns 指令修改;
(5) 在确认前面两步操作之后,调用 GT_ClrSts,更新设置的状态;
(6) 调用 GT_AxisOn,使能驱动器,这样相应的电机便能工作了;
(7) 使轴运动,运动后,若出现编码器位置和规划位置方向不一致,则可通过调用 GT_EncSns
改变编码器的计数方向。
| GT_ClrSts | 清除驱动器报警标志、 跟随误差越限标志、 限位触发标志 1. 只有当驱动器没有报警时才能清除轴状态字的报警标志 2. 只有当跟随误差正常以后,才能清除跟随误差越限标志 3. 只有当离开限位开关,或者规划位置在软限位行程以内时才能 清除轴状态字的限位触发标志 |
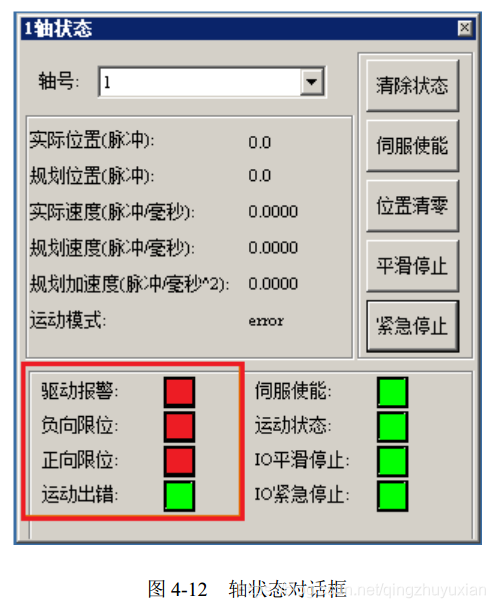
若控制器刚复位完,轴 1 状态如图 4-12 所示;若将“4.3.3”设置写入了控制器,使报警无效,并点击“伺服使能”,轴 1 状态如图 4-13 所示。(注:可以同时启动 4 个轴状态显示对话框。对话框的“轴号”下拉列表可以选择控制轴号,选择后,对话框的标题将显示对应信息)。

紧急停止信号数字量输入选择:选择紧急停止信号的数字量输入的来源,运动控制器支持
将任何数字量输入信号配置为紧急停止信号,增加用户进行硬件接线的自由性。该项的第
一个下拉列表选择数字量输入的类型,默认为没有紧急停止信号;第二个下拉列表选择数
字量输入的编号,在第二个下拉列表中如果选择“none”,则表示该 axis 没有紧急停止信号。
紧急停止信号数字量输入选择可以通过指令 GT_SetStopIo 设置。
GT_GetPrfPos
| 指令原型 | short GT_GetPrfPos(short profile, double *pValue, short count=1, unsigned long *pClock=NULL) |
||
| 指令说明 | 读取规划位置。 | ||
| 指令类型 | 立即指令,调用后立即生效。 | ||
| 指令参数 | 该指令共有 4 个参数,参数的详细信息如下。 | ||
| profile | 起始规划轴号,正整数。 |
| pValue | 规划位置。单位: pulse。 |
| count | 读取的轴数,默认为 1, 正整数。 |
| pClock | 读取控制器时钟,默认值为: NULL,即不用读取控制器时钟。 |
| 指令返回值 | 请参照指令返回值列表。 |
| 相关指令 | 无。 |
| 指令示例 | 例程 5-1 获取轴 1 的轴状态、运动模式、位置、速度和加速度 |
GT_GetSts
| 指令原型 | short GT_GetSts(short axis, long *pSts, short count=1, unsigned long *pClock=NULL) | ||
| 指令说明 | 读取轴状态。 | ||
| 指令类型 | 立即指令,调用后立即生效。 | ||
| 指令参数 | 该指令共有 4 个参数,参数的详细信息如下。 | ||
| axis | 起始轴号, 正整数。 | ||
| pSts | 32 位轴状态字,详细定义参见表 5-2 轴状态定义。 | ||
| count | 读取的轴数,默认为 1, 正整数。 | ||
| pClock | 读取控制器时钟,默认值为: NULL,即不用读取控制器时钟。 | ||
| 指令返回值 | 请参照指令返回值列表。 | ||
| 相关指令 | GT_ClrSts | ||
| 指令示例 | 例程 5-1 获取轴 1 的轴状态、运动模式、位置、速度和加速度 |
表 5-2 轴状态定义
| 0 | 保留 |
| 1 | 驱动器报警标志 控制轴连接的驱动器报警时置 1 |
| 2 | 保留 |
| 3 | 保留 |
| 4 | 跟随误差越限标志 控制轴规划位置和实际位置的误差大于设定极限时置 1 |
| 5 | 正限位触发标志 正限位开关电平状态为限位触发电平时置 1 规划位置大于正向软限位时置 1 |
| 6 | 负限位触发标志 负限位开关电平状态为限位触发电平时置 1 规划位置小于负向软限位时置 1 |
| 7 | IO 平滑停止触发标志 如果轴设置了平滑停止 IO,当其输入为触发电平时置 1,并自动平滑停止该轴 |
| 8 | IO 急停触发标志 如果轴设置了急停 IO,当其输入为触发电平时置 1,并自动急停该轴 |
| 9 | 电机使能标志 电机使能时置 1 |
| 10 | 规划运动标志 规划器运动时置 1 |
| 11 | 电机到位标志 规划器静止,规划位置和实际位置的误差小于设定误差带,并且在误差带内保持设定时 间后,置起到位标志 |
| 12~31 | 保留 |
GT_2DCompareStatus
| 指令原型 | short GT_2DCompareStatus(short chn,short *pStatus,long *pCount,short *pFifo,short *pFifoCount,short *pBufCount); |
||
| 指令说明 | 读取二维位置比较输出状态。 | ||
| 指令类型 | 立即指令,调用后立即生效。 | ||
| 指令参数 | 该指令共有 6 个参数,参数的详细信息如下。 | ||
| chn | 通道号 0: HSIO0,通道号 1: HSIO1 | ||
| pStatus | 0:正在进行比较输出 1:比较输出完成 | ||
| pCount | 位置比较已输出次数 | ||
| pFifo | 当前空闲 FIFO | ||
| pFifoCount | 当前空闲 FIFO 剩余空间 | ||
| pBufCount | FPGA 中 FIFO 剩余空间, FPGA 的 FIFO 总大小为 512,启动位置比较之前,压入 的数据先进入 FPGA 的 FIFO |
||
| 指令返回值 | 请参照指令返回值列表。 | ||
| 相关指令 | 无 | ||
| 指令示例 | 无 |
1. 后文涉及的函数指令说明均为单卡库函数指令。
2. 单卡库和多卡库函数的区别在于多卡库的函数多了一个“卡号”参数(第一张卡的卡号为 0)。
3. 如果应用程序需要操作多张卡,仍然可以使用单卡库提供的函数,但是为了编程方便,建议直接使用多卡库,即使是只操作一张卡也可以使用多卡库。
4.与本说明书配套发行的 gts.dll 动态链接库包含了扩展 IO 模块的函数指令,用户可以直接调用操作扩展 IO 模块,函数指令的详细说明请参考扩展 IO 模块配套《扩展模块编程手册》。安装 GTS 控制卡的驱动后,无需再安装扩展 IO 模块驱动,两个驱动是
一样的
端子板 CN9、 CN10 和 CN11 接口是通用数字输入输出信号(简称通用 IO 信号)、原点输入信号(简称 HOME)、限位输入信号接口(简称 LIMIT)。
设置 Smart Home 回原点的参数,该参数为一结构体,详细参数定义及说明请参照
结构体 THomePrm:
typedef struct
{
short mode; // 回原点模式
short moveDir; // 设置启动搜索原点时的运动方向(如果回原点运动包含搜索 Limit 则为搜索 Limit 的运动方向):-1-负方向, 1-正方向
short indexDir; // 设置搜索 Index 的运动方向: -1-负方向,1-正方向,在限位+Index 回原点模式下 moveDir 与indexDir 应该相异
short edge; // 设置捕获沿: 0-下降沿, 1-上升沿
short triggerIndex; // 默认与回零轴号一致,不需要设置
short pad1[3]; // 保留,其中 pad1[0]表示捕获到 Home 后运动到最终位置
(捕获位置 + homeOffset)所使用的速度, 0 或其它值-
使用 velLow(默认), 1-使用 velHigh。
double velHigh; // 回原点运动的高速速度(单位: pulse/ms)
double velLow; // 回原点运动的低速速度(单位: pulse/ms)
double acc; // 回原点运动的加速度(单位: pulse/ms^2)
double dec; // 回原点运动的减速度(单位: pulse/ms^2)
short smoothTime; // 回原点运动的平滑时间:取值[0,50],单位: ms,
具体含义与 GTS 系列控制器点位运动相似
short pad2[3]; // pad2[1]表示在电机启动回零时是否检测机械处于限位或
原点位置, 0 或其它值-不检测(默认), 1-检测。如果
不启用检测则当机械刚好处于限位或原点位置时将无法
回零;如果启用检测则当机械处于限位或原点时电机会先
按照 escapeStep 参数设置的回退距离进行回退,在根据
具体回零模式进行回零,因此如果启用检测功能,那么
escapeStep 的值不能为 0,否则无法执行回退动作。对
于压到限位或原点的电平判断:控制器默认高电平触发,
即限位或原点处于高电平状态则控制器认为当前压在限
位或原点上面,若用户的限位开关或原点开关不是此种模
式接法,可以通过控制器配置里面的 Di 选择项选择限位
或原点并设置其的“输入反转”为“取反”。
long homeOffset; // 最终停止的位置相对于原点的偏移量
long searchHomeDistance; // 设定的搜索 Home 的搜索范围, 0 表示
搜索距离为 805306368
long searchIndexDistance; // 设定的搜索 Index 的搜索范围, 0 表示
搜索距离为 805306368
long escapeStep; // 采用“限位回原点” 方式时,反方向离开
限位的脱离步长
long pad3[2]; // 保留(不需要设置)
} THomePrm;
| 回原点模式宏定义: HOME_MODE_LIMIT (10):限位回原点 HOME_MODE_LIMIT_HOME (11):限位+Home回原点 HOME_MODE_LIMIT_INDEX (12):限位+Index回原点 HOME_MODE_LIMIT_HOME_INDEX (13):限位+Home+Index回原点 HOME_MODE_HOME (20): Home回原点 HOME_MODE_HOME_INDEX (22): Home+Index回原点 HOME_MODE_INDEX (30): Index回原点 HOME_MODE_FORCED_HOME (40):强制Home回原点 HOME_MODE_FORCED_HOME_INDEX (41):强制Home+Index回原点 |
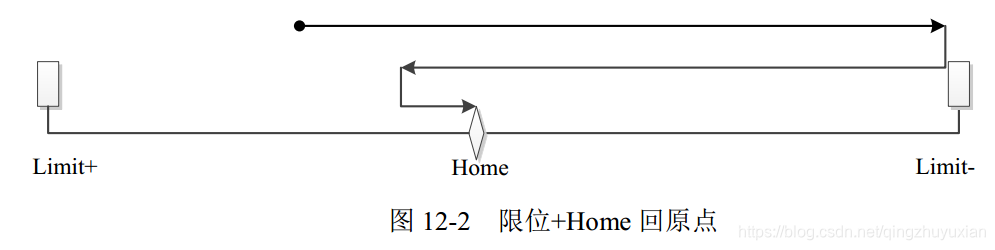
限位+Home 回原点:调用回原点指令,电机从所在位置以较高的速度往限位方向运动,如果
碰到限位,则反方向运动并启动高速硬件捕获,在设定的搜索范围内搜索 Home,当触发 Home
开关后,电机会以较低的速度运动到捕获的位置处(即 Home 开关)。
Home 回原点:调用回原点指令,电机从所在位置以较高的速度运动并启动高速硬件捕获,在
设定的搜索范围内寻找 Home,当触发 Home 开关后,电机会以较低的速度运动到捕获的位置
处。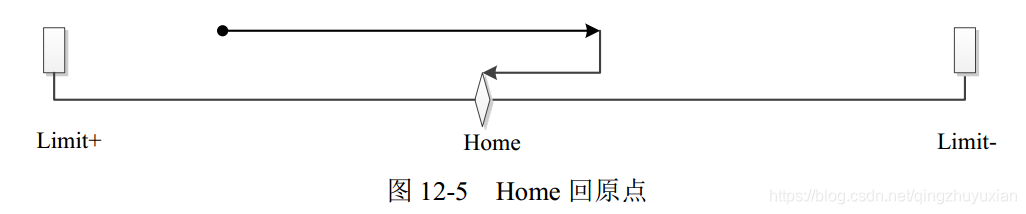
int main(int argc, char* argv[])
{
short sRtn;
short gAxis = 1;
THomeStatus tHomeSts;
sRtn = GT_Open();
sRtn = GT_Reset();
sRtn = GT_AlarmOff(gAxis);
sRtn = GT_LmtsOn(gAxis); //如果没有接限位开关则需要把限位取消
sRtn = GT_LmtSns(3); //限位为低电平触发(按实际情况设置)
sRtn = GT_EncSns(1); //编码器方向设置(按实际编码器设置,保证规划位置与实际
位置方向一致)
sRtn = GT_ClrSts(gAxis);
sRtn = GT_ZeroPos(gAxis);
sRtn = GT_AxisOn(gAxis); //必须使能轴
//设置 Smart Home 回原点参数
THomePrm tHomePrm;
sRtn = GT_GetHomePrm(1,&tHomePrm);
tHomePrm.mode = 20;
tHomePrm.moveDir = 1;
tHomePrm.indexDir = 1;
tHomePrm.edge = 0;
tHomePrm.velHigh = 5;
tHomePrm.velLow = 1;
tHomePrm.acc = 0.1;
tHomePrm.dec = 0.1;
tHomePrm.searchHomeDistance = 200000;
tHomePrm.searchIndexDistance = 30000;
tHomePrm.escapeStep = 1000;
sRtn = GT_GoHome(1,&tHomePrm); //启动 Smart Home 回原点
do
{
sRtn = GT_GetHomeStatus(1,&tHomeSts); //获取回原点状态
} while(tHomeSts.run); //等待搜索原点停止| 例程 3-1 检测 GT 指令是否正常执行 |
| 例程 4-1 修改编码器计数方向 |
| 例程 4-2 修改限位开关触发电平 |
| 例程 4-3 设置第 1 轴为脉冲控制“脉冲+方向”方式 |
| 例程 4-4 设置第 1 轴为闭环控制方式 |
| 例程 5-1 获取轴 1 的轴状态、运动模式、位置、速度和加速度 |
| 例程 6-1 点位运动 |
| 例程 6-2 Jog 运动 |
| 例程 6-3 PT 静态 FIFO |
| 例程 6-4 PT 动态 FIFO |
| 例程 6-5 电子齿轮跟随 |
| 例程 6-6 飞剪中的 follow 模式应用 |
| 例程 6-7 Follow 单 FIFO 模式 |
| 例程 6-8 Follow 双 FIFO 切换 |
| 例程 6-9 建立坐标系 |
| 例程 6-10 直线插补例程 |
| 例程 6-11 圆弧插补例程 |
| 例程 6-12 插补 FIFO 管理 |
| 例程 6-13 前瞻预处理例程 |
| 例程 6-14 刀向跟随功能 GT_BufMove() |
| 例程 6-15 刀向跟随功能 GT_BufGear() |
| 例程 6-16 刀向跟随功能——实际工件加工 |
| 例程 6-17 PVT 描述方式 |
| 例程 6-18 Complete 描述方式 |
| 例程 6-19 Percent 描述方式 |
| 例程 6-20 Continuous 描述方式 |
| 例程 7-1 访问数字 IO |
| 例程 7-2 读取 8 个轴编码器和辅助编码器位置值 |
| 例程 7-3 访问 DAC |
| 例程 7-4 访问 ADC |
| 例程 8-1 Home/Index 捕获 |
| 例程 8-2 Home 回原点 |
| 例程 8-3 Home+Index 回原点 |
| 例程 8-4 探针捕获 |
| 例程 8-5 HSIO 捕获用法示例 |
| 例程 8-6 重复捕获使用说明 |
| 例程 9-1 软限位使用 |
| 例程 10-1 运动程序单线程累加求和 |
| 例程 10-2 运动程序多线程累加求和 |
| 例程 11-1 读取运动控制器版本号 |
| 例程 11-2 电机到位检测功能 |
| 例程 11-3 自动回原点 |
| 例程 11-4 位置比较输出指令详细的用法 |
例程代码
gitee
例程 4 二维位置比较的一维模式
由于二维位置比较模块对压入的数据没有单调性要求,其一维模式也同样对比较数据没有单调
性要求。
short rtn;
T2DComparePrm prm;
rtn =GT_2DCompareMode(0,COMPARE2D_MODE_1D); //使用二维位置比较的 1 维模式
prm.encx = 1; //1 维模式时,这个值没有用,但是必须是一个非 0 值
prm.ency = 1; //以 1 轴作为比较源
prm.maxerr = 3; //最大误差 pulse
prm.outputType = 0; //输出脉冲
prm.source = 0; //内部脉冲计数器
prm.startLevel = 0; //设置初始电平
prm.threshold = 0; //最优点计算阈值,用户无需关心,取 0
prm.time = 500; //脉冲宽度 us
rtn =GT_2DCompareSetPrm(0,&prm);二维位置比较输出
rtn =GT_2DCompareMode(1,COMPARE2D_MODE_1D); //使用二维位置比较的 1 维模式
T2DCompareData databuf[5];
databuf[0].px = 0;
databuf[0].py = 10000;
databuf[0].px = 0;
databuf[0].py = 20000;
rtn =GT_2DCompareData(0,2,databuf,0); //设置比较数据,只需设置 y 的数据, x 的数据取 0
rtn =GT_2DCompareStart(0);