índice
Experiência de captura de entrada STM32
Registre a explicação da peça (tome TIM5_CH1 como exemplo)
A função de TIMx_CCMR1.ICF [3: 0]
Como julgar se é uma borda ascendente ou uma borda descendente?
Como realizar a medição da largura de pulso?
O que devo fazer se o cronômetro estourar quando o nível alto durar muito tempo?
O que devo fazer se o cronômetro estourar muitas vezes?
Princípio de configuração da função de biblioteca
Configuração de pinos multiplexados e GPIO
Configuração das propriedades do canal de captura de entrada
Configuração de prioridade de interrupção
Seleção do tipo de interrupção TIM5_CH1
Função de interrupção de serviço para medição de pulso eficaz
Foco: A lógica de escrever funções de serviço de interrupção
Dificuldade: O que devo fazer quando o nível alto dura muito tempo?
Experiência de captura de entrada STM32
Registre a explicação da peça (tome TIM5_CH1 como exemplo)

A função de TIMx_CCMR1.ICF [3: 0]
A função do filtro é "coletar amostras para determinar o estado de nível preciso". Vamos tomar ICIF [3: 0] = 0010 como exemplo:

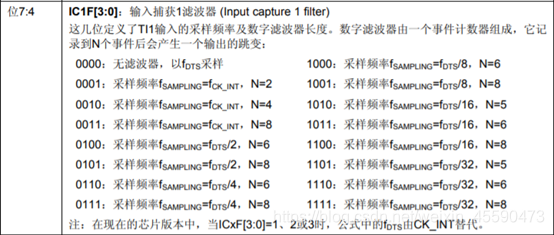
Exemplo de aplicação: assumindo que o sinal de entrada oscila dentro de um máximo de 5 ciclos de clock internos, devemos configurar a largura de banda do filtro para ser maior que 5 ciclos de clock. Portanto, podemos amostrar 8 vezes continuamente (na frequência fDTS) para confirmar a última transição de borda real em TI1, ou seja, escrever IC1F = 0011 no registrador TIMx_CCMR1.
A função de TIMx_CCER.CC1P
Este registro é muito importante, ele determina a "captura de entrada do trigger de borda ascendente / descendente" e, o mais importante, é o único registro usado para configurar a polaridade, o que significa que a polaridade de entrada e a polaridade de saída devem passar por ele. Configuração, portanto, quando chamarmos a função abaixo, você descobrirá que seja uma saída PWM ou uma captura de entrada, alterar a polaridade é a mesma função da configuração.

A função de TIMx_CCMR1.CC1S
O acima é a configuração do canal. A existência de CC1S [1: 0] é para configurar o "tipo de sinal que dispara o evento / interrupção". Por exemplo, CC1S [1: 0] = 01, então o sinal que dispara a interrupção / evento em TIM5_CH1 é de TI1FP1 .

A função de TIMx_CCMR1.ICPS
A função do prescaler é configurar "Quantas alterações de nível válido precisamos para acionar uma interrupção?".

A função de TIMx_CCER.CC1E
Habilite o canal de captura de entrada correspondente, de modo que quando a porta IC1PS produzir uma mudança de nível válida, ela possa ser capturada imediatamente para acionar o evento / interrupção correspondente.
Habilidades de programação
Como julgar se é uma borda ascendente ou uma borda descendente?
Borda de pulso + estado do nível no momento anterior = mudança de nível. Por exemplo: o nível no momento anterior estava alto e a borda do pulso foi capturada, então podemos saber "o nível neste momento é baixo e a borda do pulso é um pulso de borda descendente".
Como realizar a medição da largura de pulso?
Sabemos que "o princípio da captura de entrada é: quando uma mudança de pulso válida é capturada, o valor do contador será automaticamente capturado pelo registro de captura / comparação", podemos fazer isso: se quisermos medir a duração de um nível alto, podemos Quando ocorre a borda ascendente, definimos o valor de contagem inicial do contador como 0 e, quando ocorre a borda descendente, carregamos o valor do contador neste momento no contador de captura / comparação para capturar e ler. Finalmente "(valor capturado - valor inicial do contador) * duração da contagem da unidade do contador = duração de alto nível".
O que devo fazer se o cronômetro estourar quando o nível alto durar muito tempo?
Sabemos que cada temporizador tem uma função de serviço de interrupção correspondente, podemos habilitar duas interrupções: interrupção de estouro do contador + interrupção de captura de entrada. Podemos registrar o número de vezes que o temporizador transborda quando o nível de entrada é alto. No cálculo final do tempo, "duração de alto nível = (tempos de estouro * (valor MAX do contador-valor inicial do contador) + (valor de captura-valor inicial do contador)) * tempo de contagem da unidade do contador".
O que devo fazer se o cronômetro estourar muitas vezes?
Quando a duração de alto nível é muito longa e o contador transborda muitas vezes, não precisamos esperar pelo "pulso de queda", definir diretamente o "sinalizador de conclusão de captura" e definir o valor de captura para o que seu tipo de dados pode representar Valor máximo.
Princípio de configuração da função de biblioteca
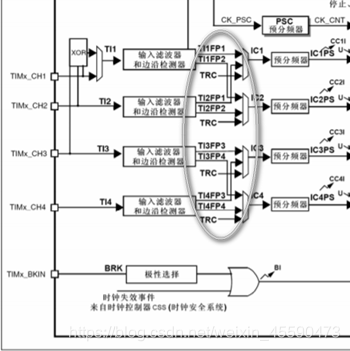
Diagrama de bloco geral

Configuração de pinos multiplexados e GPIO
Habilite o clock de barramento correspondente e a inicialização GPIO:

Eu multiplexo o pino PA0 como TIM5_CH1 para captura de entrada.

Podemos ver no status de KEY_UP que GPIOA.0 deve ser uma entrada pull-down.Somente desta forma, o botão pode ser pressionado para acionar a mudança de nível de entrada.
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM5, ENABLE); // 使能GPIOA与TIM5的时钟进行引脚的复用
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); // 配置PA0为下拉输入
Configuração do contador
O contador é a alma do temporizador. Independentemente de configurarmos a saída PWM ou a captura de entrada, devemos primeiro configurar o temporizador:

A imagem acima é a função de "IM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; // AHB-> APB1 sem divisão de frequência".
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
IM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; // AHB->APB1不分频
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; // 向上计数模式
TIM_TimeBaseInitStructure.TIM_Period = ARR;
TIM_TimeBaseInitStructure.TIM_Prescaler = PR;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStructure); // 初始化计数器 Configuração das propriedades do canal de captura de entrada
Configure ainda TIM5_CH1 de acordo com dois modos de entrada / saída diferentes:
TIM_ICInitTypeDef TIM_ICInitStructure;
TIM_ICInitStructure.TIM_Channel = TIM_Channel_1; // 使用TIM5_CH1进行输入捕获实验
TIM_ICInitStructure.TIM_ICFilter = 0; // 不进行采集滤波
TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; // 上升沿触发
TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; // 一个有效上升沿触发一次输入捕获
TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; // 选择通道1的信号作为触发输入捕获的信号
TIM_ICInit(TIM5, &TIM_ICInitStructure); // 配置TIM5_CH1的输入捕获属性
Configuração de prioridade de interrupção
Configure a prioridade do vetor de interrupção NVIC:
NVIC_InitTypeDef NVIC_InitStructure;
VIC_InitStructure.NVIC_IRQChannel = TIM5_IRQn; // TIM5中断使能
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; // 抢占优先级 = 1
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; // 响应优先级 = 1
NVIC_Init(&NVIC_InitStructure); // 配置NVIC嵌入式中断向量优先级
Seleção do tipo de interrupção TIM5_CH1
Além disso, configure o tipo de gatilho de interrupção TIM5_CH1:
TIM_ITConfig(TIM5, TIM_IT_CC1|TIM_IT_Update, ENABLE); // 使能TIM5_CH1的中断
Ativar temporizador
Timer TIM5 habilitado:
TIM_Cmd(TIM5, ENABLE); // TIM5定时器使能
Função de interrupção de serviço para medição de pulso eficaz
Aqui queremos medir o tempo que o botão é pressionado, ou seja, calcular a "duração de alto nível":
u8 TIM_CAP_STA = 0;
u16 TIM_CAP_VAL = 0;
void TIM5_IRQHandler()
{
if((TIM_CAP_STA&0x80) == 0) // 捕获未完成
{
if(TIM_GetITStatus(TIM5, TIM_IT_CC1) == SET)
{
if((TIM_CAP_STA&0x40) == 0) // 上升沿
{
TIM_SetCounter(TIM5, 0); // 开始计数
TIM_CAP_VAL = 0;
TIM_CAP_STA = 0;
TIM_CAP_STA |= 0x40; // 高电平
TIM_OC1PolarityConfig(TIM5, TIM_OCPolarity_Low); // 捕获下降沿
}
else // 下降沿
{
TIM_CAP_VAL = TIM_GetCapture1(TIM5); // 捕获当前值
TIM_CAP_STA |= 0x80; // 完成捕获
TIM_OC1PolarityConfig(TIM5, TIM_OCPolarity_High); // 捕获上升沿
}
}
if(TIM_GetITStatus(TIM5, TIM_IT_Update) == SET)
{
if(TIM_CAP_STA&0x40)
{
if((TIM_CAP_STA&0x3F) == 0x3F)
{
TIM_CAP_VAL = 0xFFFF;
TIM_CAP_STA |= 0x80;
}
else
{
TIM_CAP_STA++;
}
}
}
}
TIM_ClearITPendingBit(TIM5, TIM_IT_CC1|TIM_IT_Update);
}
Foco: A lógica de escrever funções de serviço de interrupção


u8 TIM_CAP_STA = 0;
u16 TIM_CAP_VAL = 0;
void TIM5_IRQHandler()
{
if((TIM_CAP_STA&0x80) == 0) // 捕获未完成
{
if(TIM_GetITStatus(TIM5, TIM_IT_CC1) == SET) // TIM5_CH1捕获有效的脉冲沿
{
if((TIM_CAP_STA&0x40) == 0) // 前一刻为低电平——脉冲沿为上升沿
{
TIM_SetCounter(TIM5, 0); // 开始计数
TIM_CAP_VAL = 0;
TIM_CAP_STA = 0;
TIM_CAP_STA |= 0x40; // 更新电平状态
TIM_OC1PolarityConfig(TIM5, TIM_OCPolarity_Low); // 捕获下降沿
}
else // 前一刻为高电平——脉冲沿为下降沿
{
TIM_CAP_VAL = TIM_GetCapture1(TIM5); // 捕获当前值
TIM_CAP_STA |= 0x80; // 完成捕获
TIM_OC1PolarityConfig(TIM5, TIM_OCPolarity_High); // 捕获上升沿
}
}
if(TIM_GetITStatus(TIM5, TIM_IT_Update) == SET) // 计数器溢出
{
if(TIM_CAP_STA&0x40) // 如果为高电平,计数器溢出则会被记录
{
if((TIM_CAP_STA&0x3F) == 0x3F) // 如果计数器溢出次数过多
{
TIM_CAP_VAL = 0xFFFF; // 此时的捕获值设为MAX
TIM_CAP_STA |= 0x80; // 已经完成高电平的捕获
}
else
{
TIM_CAP_STA++; // 计数器溢出次数+1
}
}
}
}
TIM_ClearITPendingBit(TIM5, TIM_IT_CC1|TIM_IT_Update); // 清除中断标志
} Após os procedimentos a seguir, já podemos julgar: O nível neste momento é válido?
if(TIM_GetITStatus(TIM5, TIM_IT_CC1) == SET) // TIM5_CH1捕获有效的脉冲沿
{
if((TIM_CAP_STA&0x40) == 0) // 前一刻为低电平——脉冲沿为上升沿
{
TIM_SetCounter(TIM5, 0); // 开始计数
TIM_CAP_VAL = 0;
TIM_CAP_STA = 0;
TIM_CAP_STA |= 0x40; // 更新电平状态
TIM_OC1PolarityConfig(TIM5, TIM_OCPolarity_Low); // 捕获下降沿
}
else // 前一刻为高电平——脉冲沿为下降沿
{
TIM_CAP_VAL = TIM_GetCapture1(TIM5); // 捕获当前值
TIM_CAP_STA |= 0x80; // 完成捕获
TIM_OC1PolarityConfig(TIM5, TIM_OCPolarity_High); // 捕获上升沿
}
} Em seguida, registramos o número de overflows conforme se trata de um nível alto: quando está em um nível alto, ou seja, um nível efetivo, o estouro do contador é considerado válido e registrado.
if(TIM_GetITStatus(TIM5, TIM_IT_Update) == SET) // 计数器溢出
{
if(TIM_CAP_STA&0x40) // 如果为高电平,计数器溢出则会被记录
{
if((TIM_CAP_STA&0x3F) == 0x3F) // 如果计数器溢出次数过多
{
TIM_CAP_VAL = 0xFFFF; // 此时的捕获值设为MAX
TIM_CAP_STA |= 0x80; // 已经完成高电平的捕获
}
else
{
TIM_CAP_STA++; // 计数器溢出次数+1
}
}
} Dificuldade: O que devo fazer quando o nível alto dura muito tempo?
if(TIM_GetITStatus(TIM5, TIM_IT_Update) == SET) // 计数器是否溢出
{
if(TIM_CAP_STA&0x40) // 是否为有效电平(高电平)
{
if((TIM_CAP_STA&0x3F) == 0x3F) // 捕获次数已经为MAX
{
TIM_CAP_VAL = 0xFFFF; // 捕获值为MAX
TIM_CAP_STA |= 0x80; // 直接标记:已经捕获完成
}
else
{
TIM_CAP_STA++;
}
}
}
Quando a duração de alto nível é muito longa e o contador transborda muitas vezes, não precisamos esperar pelo "pulso de queda", definir diretamente o "sinalizador de conclusão de captura" e definir o valor de captura para o que seu tipo de dados pode representar Valor máximo.
Exemplo de código
Main.c
#include "key.h"
#include "timer.h"
#include "usart.h"
#include "led.h"
#include "delay.h"
int main()
{
extern u8 TIM_CAP_STA;
extern u16 TIM_CAP_VAL;
u32 temp = 0;
delay_init(); // 初始化systick时钟
KEY_InitConfig(); // 初始化KEY_WAKEUP
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); // 设置中断优先级分组
TIM_CAPTURE_InitConfig(0xFFFF, 72-1); // 周期为65.535s
uart_init(115200); // 初始化串口
while(1)
{
delay_ms(10);
if((TIM_CAP_STA&0x80) == 0x80) // 完成有效电平的捕获
{
temp = TIM_CAP_VAL + (TIM_CAP_STA&0x3F) * 0xFFFF; // 计算脉冲持续时间
printf("%d\r\n", temp); // 串口打印
TIM_CAP_STA = 0; // 清空TIM_CAP_STA内的数据以便再次捕获
}
}
}
Timer.c
#include "timer.h"
#include "stm32f10x.h"
#include "sys.h"
#include "led.h"
void TIM_CAPTURE_InitConfig(u16 ARR, u16 PSC)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_ICInitTypeDef TIM_ICInitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM5, ENABLE); // 使能APB1总线的TIM5时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); // 使能APB2总线的GPIOA时钟
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); // PA0初始化为下拉输入
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; // AHB = APB1
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; // 向上计数模式
TIM_TimeBaseInitStructure.TIM_Period = ARR;
TIM_TimeBaseInitStructure.TIM_Prescaler = PSC;
TIM_TimeBaseInit(TIM5, &TIM_TimeBaseInitStructure); // 配置计数器的属性
TIM_ICInitStructure.TIM_Channel = TIM_Channel_1;
TIM_ICInitStructure.TIM_ICFilter = 0;
TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising;
TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1;
TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI;
TIM_ICInit(TIM5, &TIM_ICInitStructure); // 配置TIM5的输入属性
NVIC_InitStructure.NVIC_IRQChannel = TIM5_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_Init(&NVIC_InitStructure); // 配置TIM5的中断优先级
TIM_ITConfig(TIM5, TIM_IT_CC1|TIM_IT_Update, ENABLE); // 使能TIM5_CH1的中断
TIM_Cmd(TIM5, ENABLE); // 使能TIM5
}
u8 TIM_CAP_STA = 0;
u16 TIM_CAP_VAL = 0;
void TIM5_IRQHandler()
{
if((TIM_CAP_STA&0x80) == 0)
{
if(TIM_GetITStatus(TIM5, TIM_IT_CC1) == SET)
{
if((TIM_CAP_STA&0x40) == 0x00) // 上升沿
{
TIM_CAP_STA = 0; // 初始化
TIM_CAP_VAL = 0; // 初始化
TIM_SetCounter(TIM5, 0); // 计数器开始计数
TIM_CAP_STA |= 0x40; // 高电平
TIM_OC1PolarityConfig(TIM5, TIM_OCPolarity_Low); // 改变极性/改变有效电平——捕获上升沿
}
else // 下降沿
{
TIM_CAP_VAL = TIM_GetCapture1(TIM5); // 捕获此时计数器的值
TIM_CAP_STA |= 0x80; // 完成捕获
TIM_OC1PolarityConfig(TIM5, TIM_OCPolarity_High); // 改变极性/改变有效电平——捕获下降沿
}
}
if(TIM_GetITStatus(TIM5, TIM_IT_Update) == SET) // 计数器溢出
{
if((TIM_CAP_STA&0x40) == 0x40) // 上升沿
{
if((TIM_CAP_STA&0x3F) == 0x3F) // 当溢出次数过多,就默认"捕获完成并且此时计数器的值为MAX"
{
TIM_CAP_VAL = 0xFFFF;
TIM_CAP_STA |= 0x80; // 完成捕获
}
else
{
TIM_CAP_VAL++; // 溢出次数递增
}
}
}
}
TIM_ClearITPendingBit(TIM5, TIM_IT_CC1|TIM_IT_Update); // 清楚中断标志位
}
Timer.h
#ifndef _TIMER_H
#define _TIMER_H
#include "sys.h"
void TIM_CAPTURE_InitConfig(u16 ARR, u16 PR);
#endif
Key.c
#include "key.h"
#include "stm32f10x.h"
void KEY_InitConfig()
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); // 使能总线时钟
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); // 初始化KEY_WAKRUP为下拉输入
}
Key.h
#ifndef _KEY_H
#define _KEY_H
void KEY_InitConfig();
#endif
resultado da operação
